3DObjectTracking
1.0.0
Das Verfolgen von Objekten und kinematischen Strukturen im 3D-Raum und das Bestimmen ihrer Posen und Konfigurationen ist eine wesentliche Aufgabe in der Bildverarbeitung. Seine Anwendung reicht von Augmented Reality bis hin zur Roboterwahrnehmung. Bei aufeinanderfolgenden Einzelbildern sowie 3D-Netzen und kinematischen Informationen besteht das Ziel darin, die Drehung und Verschiebung aller Körper relativ zu einer Kamera zuverlässig abzuschätzen. Obwohl das Problem gründlich untersucht wurde, bestehen immer noch viele Herausforderungen wie teilweise Verdeckungen, Erscheinungsbildänderungen, Bewegungsunschärfe, Hintergrundunordnung, Objektmehrdeutigkeit und Echtzeitanforderungen.
In diesem Repository werden wir kontinuierlich Algorithmen und Code unserer laufenden Forschung zur 3D-Objektverfolgung veröffentlichen. Die Ordner für die verschiedenen Algorithmen enthalten alles, was zur Reproduktion der in unseren Arbeiten präsentierten Ergebnisse erforderlich ist. Beachten Sie, dass der Code für jede neue Arbeit auch eine aktualisierte Version früherer Arbeiten enthält. Wenn Sie unseren Tracker in Ihrem eigenen Projekt oder Ihrer eigenen Anwendung verwenden möchten, verwenden Sie bitte den Code aus der neuesten Veröffentlichung. Derzeit befindet sich die neueste Version unseres Codes im Ordner M3T .

Ein Mehrkörper-Tracking-Framework – von starren Objekten zu kinematischen Strukturen

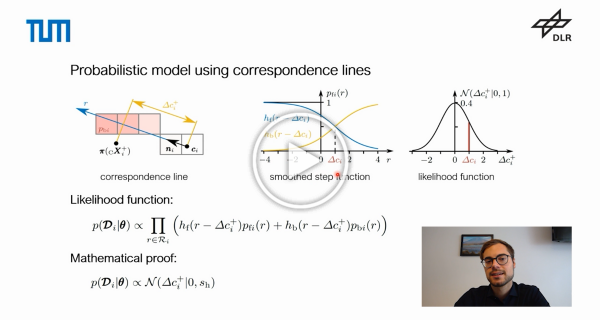
Verschmelzung von visuellem Erscheinungsbild und Geometrie für die multimodale 6DoF-Objektverfolgung
Präsentation CVPR 2022

Iterative entsprechende Geometrie
Mündlicher Vortrag ACCV 2020
Ein spärlicher Gaußscher Ansatz zur regionsbasierten 6DoF-Objektverfolgung
Ein spärlicher Gaußscher Ansatz zur regionsbasierten 6DoF-Objektverfolgung


