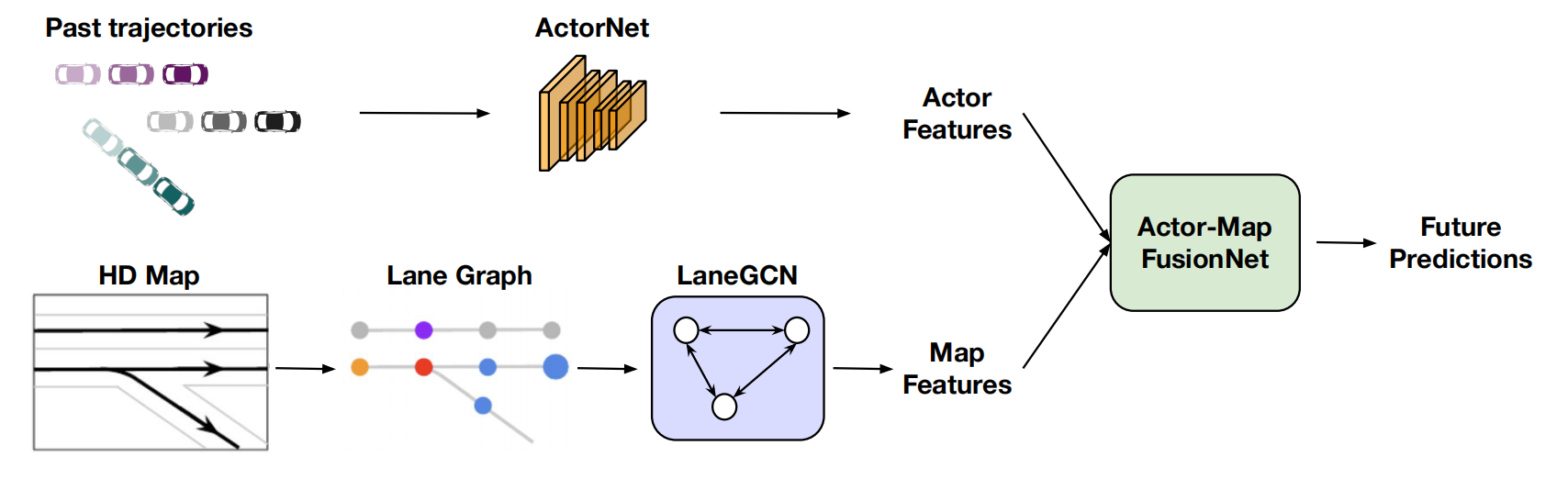
LaneGCN
1.0.0
Vorsicht
Der Amazon AWS S3-Bucket argoai-argoverse , der viele der Demodateien enthält, wurde kompromittiert. Die Dateien sind möglicherweise beschädigt.
Dateien, die auf diesen S3-Bucket verweisen, wurden geändert und alle Abrufe aus diesem Bucket sind auskommentiert. Bitte gehen Sie vorsichtig vor.
Papier | Folien | Projektseite | ECCV 2020 Mündliches Video
Ming Liang, Bin Yang, Rui Hu, Yun Chen, Renjie Liao, Song Feng, Raquel Urtasun
Platz 1 im Argoverse Motion Forecasting-Wettbewerb
Sie müssen die folgenden Pakete installieren, um den Code auszuführen:
conda create --name lanegcn python=3.7
conda activate lanegcn
conda install pytorch==1.5.1 torchvision cudatoolkit=10.2 -c pytorch # pytorch=1.5.1 when the code is release
# install argoverse api
pip install git+https://github.com/argoai/argoverse-api.git
# install others dependancy
pip install scikit-image IPython tqdm ipdbmpi4py für verteiltes Training. Horovod ist für Multi-GPU-Training effizienter als nn.DataParallel und einfacher zu verwenden als nn.DistributedDataParallel . Stellen Sie vor der Installation von horovod sicher, dass openmpi installiert ist ( sudo apt-get install -y openmpi-bin ). pip install mpi4py
# install horovod with GPU support, this may take a while
HOROVOD_GPU_OPERATIONS=NCCL pip install horovod==0.19.4
# if you have only SINGLE GPU, install for code-compatibility
pip install horovodWenn Sie Probleme mit Horovod haben, wenden Sie sich bitte an Horovod Github
Sie könnten die Skripte überprüfen und die verarbeiteten Daten herunterladen, anstatt sie stundenlang auszuführen.
bash get_data.sh # single node with 4 gpus
horovodrun -np 4 -H localhost:4 python /path/to/train.py -m lanegcn
# 2 nodes, each with 4 gpus
horovodrun -np 8 -H serverA:4,serverB:4 python /path/to/train.py -m lanegcnEs dauert 8 Stunden, das Modell mit 4 GPUS (RTX 5000) mit Horovod zu trainieren.
Wir stellen Ihnen auch ein Trainingsprotokoll zum Debuggen zur Verfügung.
python train.py -m lanegcnSie können das vorab trainierte Modell hier herunterladen
python test.py -m lanegcn --weight=/absolute/path/to/36.000.ckpt --split=test
python test.py -m lanegcn --weight=36.000.ckpt --split=val
Qualitative Ergebnisse
Beschriftungen (Rot) Vorhersage (Grün) Andere Agenten (Blau)
Quantitative Ergebnisse 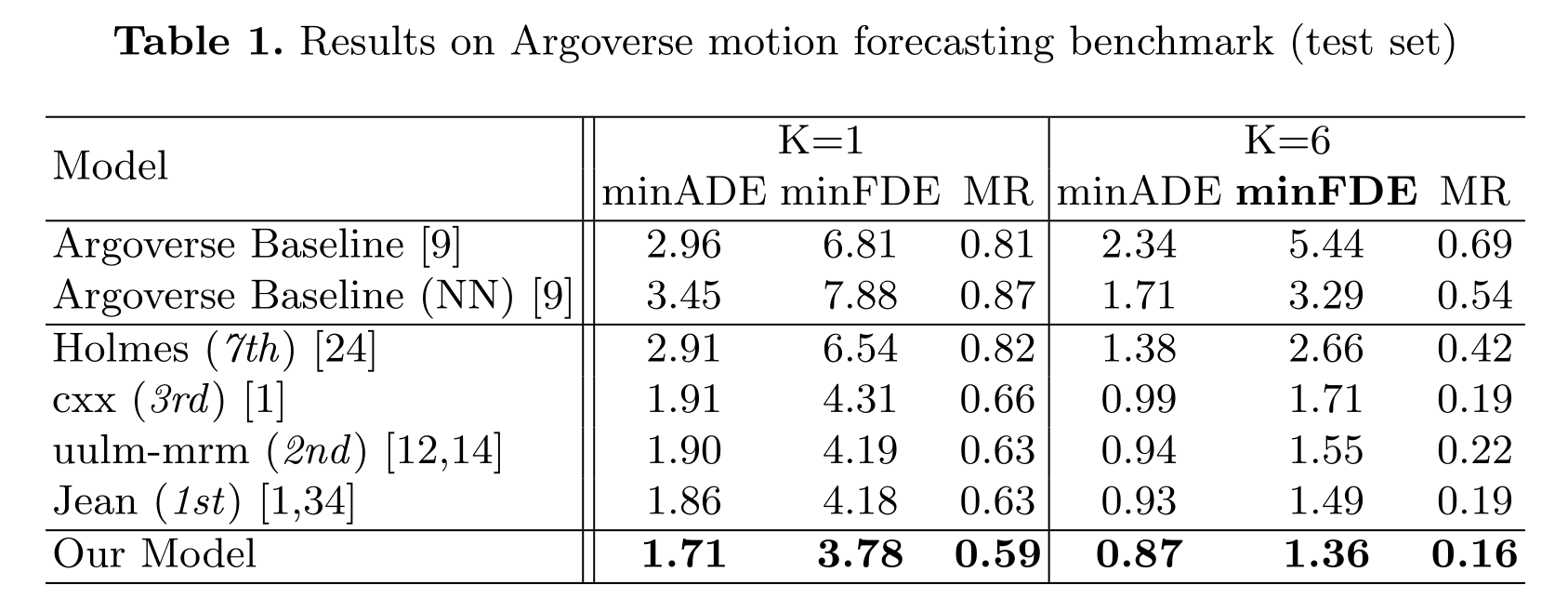
Überprüfen Sie die LIZENZ
Wenn Sie unseren Quellcode verwenden, denken Sie bitte darüber nach, Folgendes zu zitieren:
@InProceedings { liang2020learning ,
title = { Learning lane graph representations for motion forecasting } ,
author = { Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel } ,
booktitle = { ECCV } ,
year = { 2020 }
}Wenn Sie Fragen zum Code haben, öffnen Sie bitte ein Problem und @chenyuntc.


