SquawkersMcGraw
1.0.0
Reverse Engineering und Remixing des Hasbro -Furreal -Freundes "Squawkers McGraw" animatronischer Papagei 
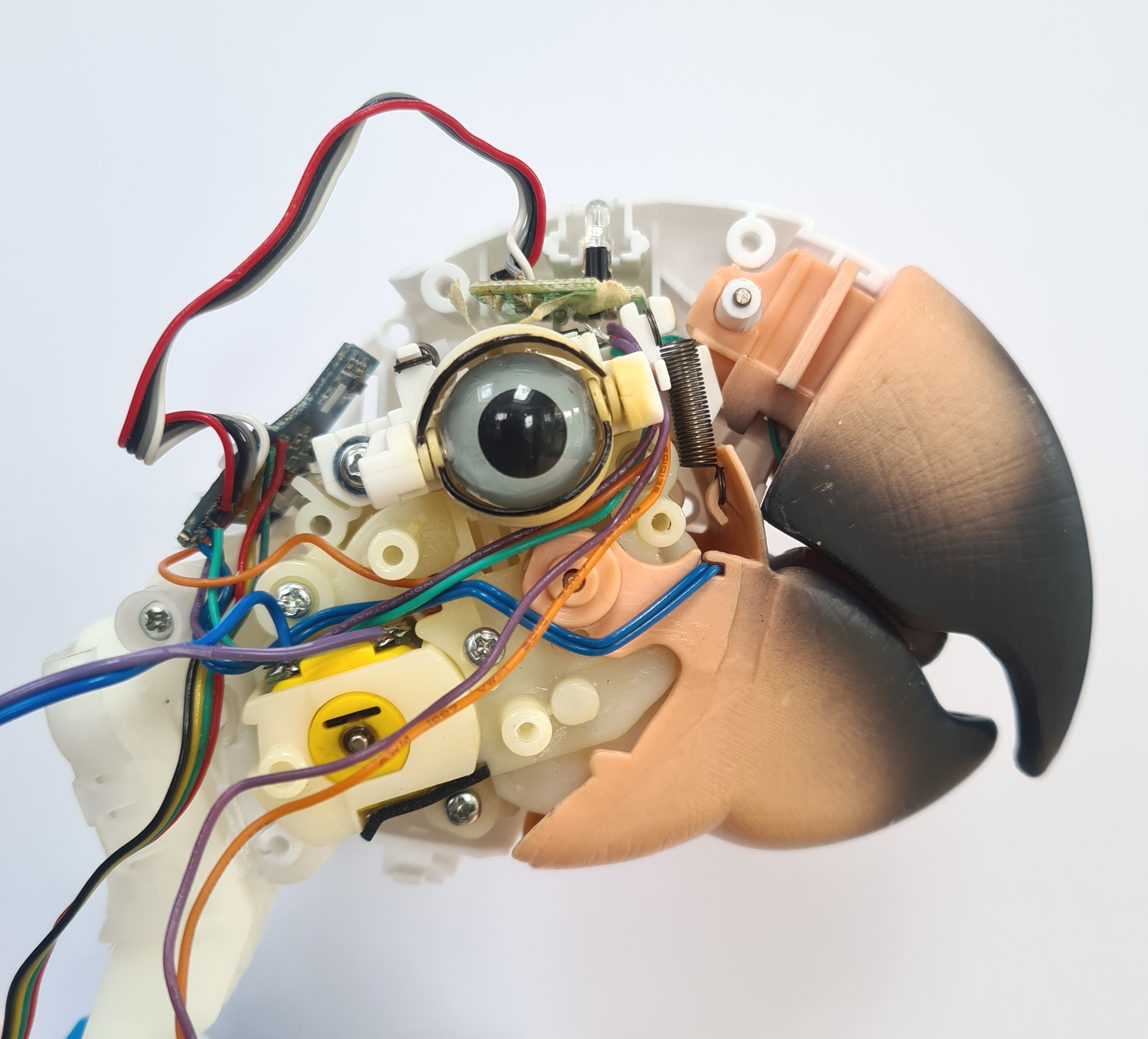 |  |  |
Es gibt eine Vielzahl von Schalter und Sensoreingängen wie folgt:
Alle Bewegungen werden nur über zwei DC -Hobbymotoren gesteuert. Durch die Verwendung eines cleveren CAM -Systems kann die Umkehrung der Richtung der Motoren verschiedene Aktuatoren auslösen.

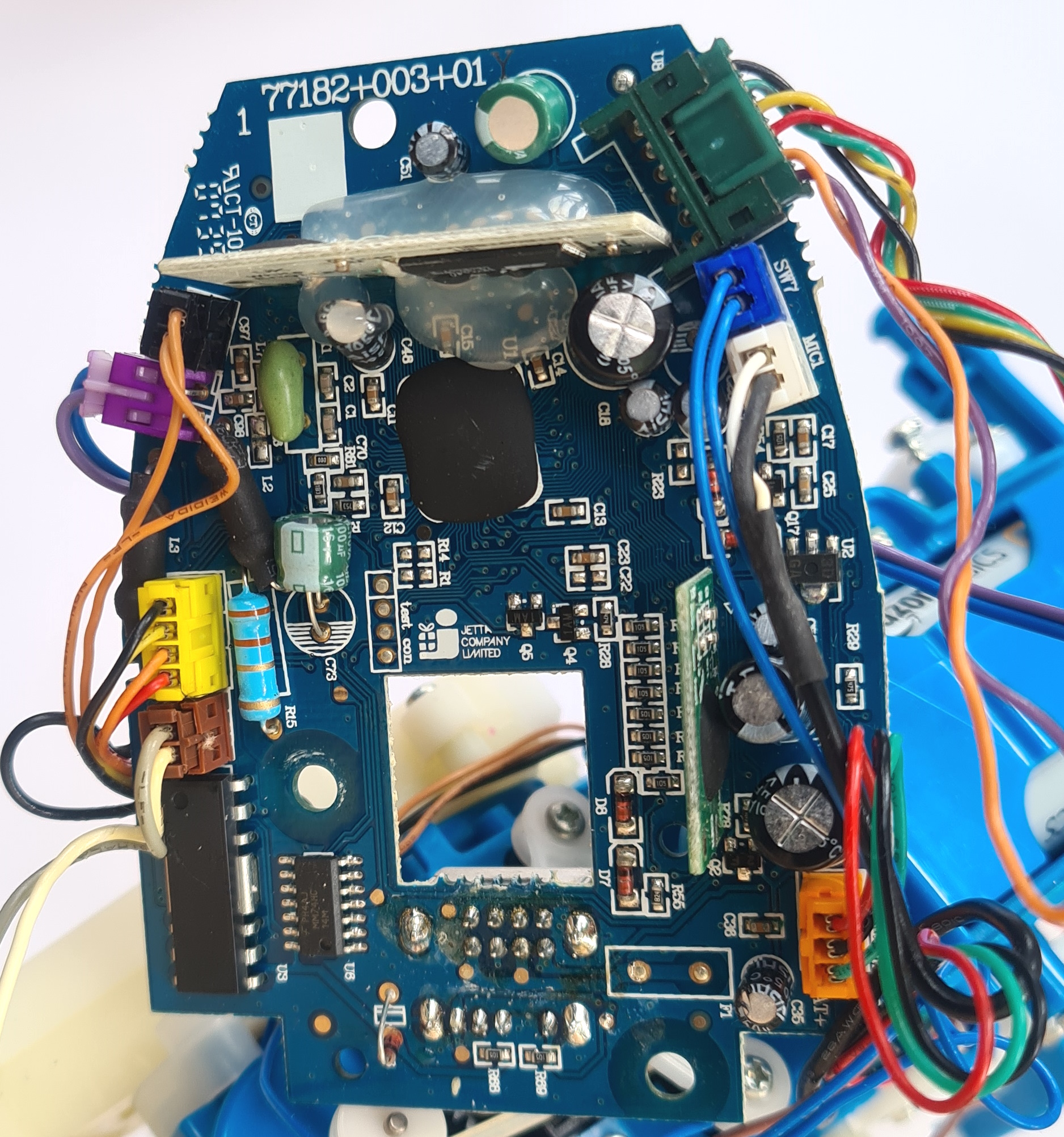
Der Controller verfügt über einen Drei -Positions -Switch, drei Play -Modus -Tasten, 6 Programmtasten und eine benutzerdefinierte Schaltfläche. Es scheint, dass Befehlszeichenfolgen mit der gemeinsamen 38 -kHz -Trägerfrequenz übertragen werden. Für eine nicht zerstörerische Methode zur Steuerung von Squawkers McGraw können Sie einfach die gleichen Befehlscodes übertragen, um ein integriertes Verhalten auszulösen.
Die folgenden Befehlszeichenfolgen wurden mit einem Arduino und dem Infrarot-Signalanalysator-Code unter https://www.patreon.com/posts/infrared-puzle-2834366 ergriffen
// Repeat Button
unsigned int repeatData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1100,2000,2000,1000,1000,2000,2000,1000,1100,2000,2000,1000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
// Custom Record [same as Response]
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,2000,1000,1100,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
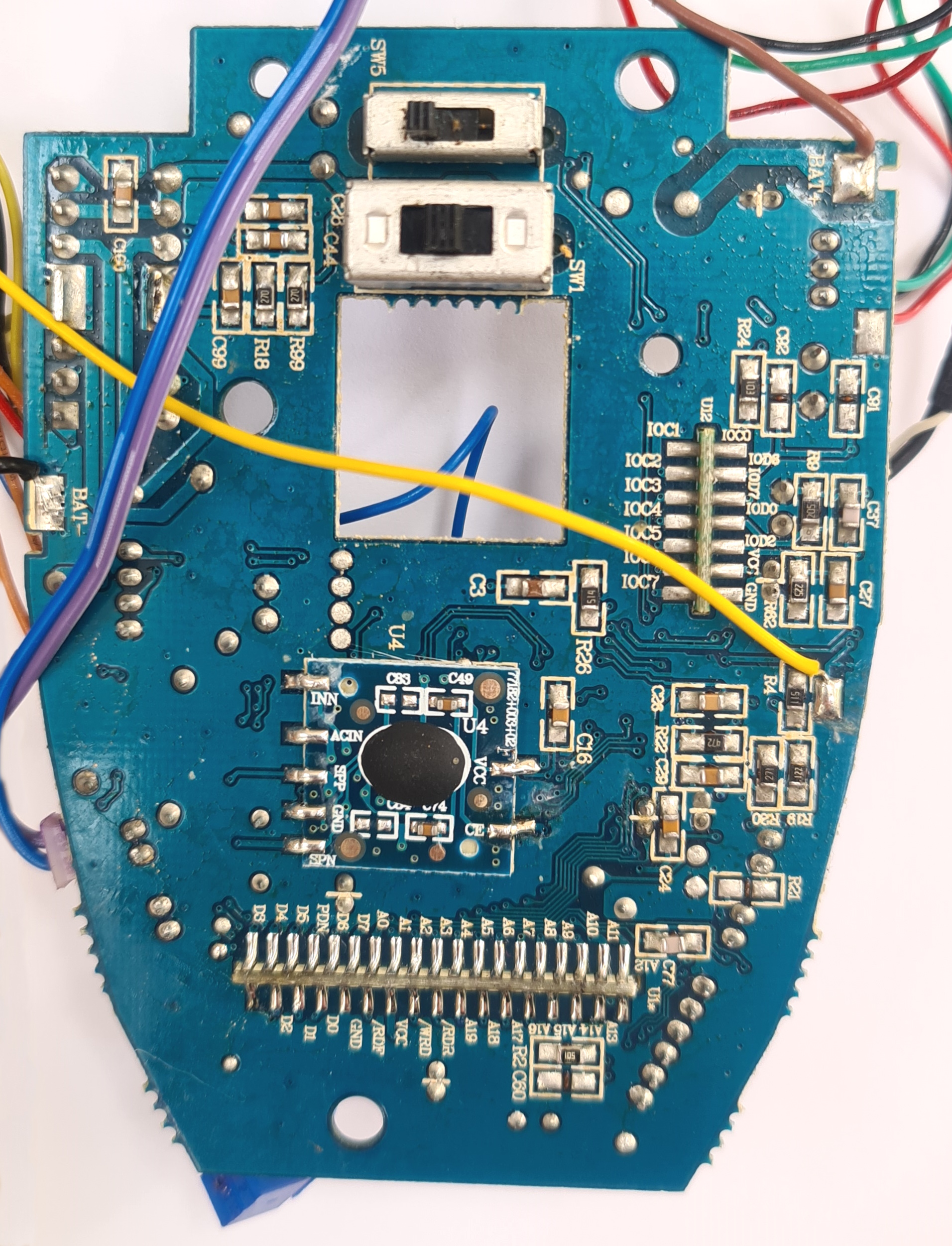
Um das Verhalten des Papageien vollständig anzupassen, erfordert eine destruktivere Änderung - die Verbindungen an die Steuerplatte zu brechen und stattdessen die Eingänge und Ausgänge an einen Prozessor wie einen Arduino zu verkaufen, wie folgt:
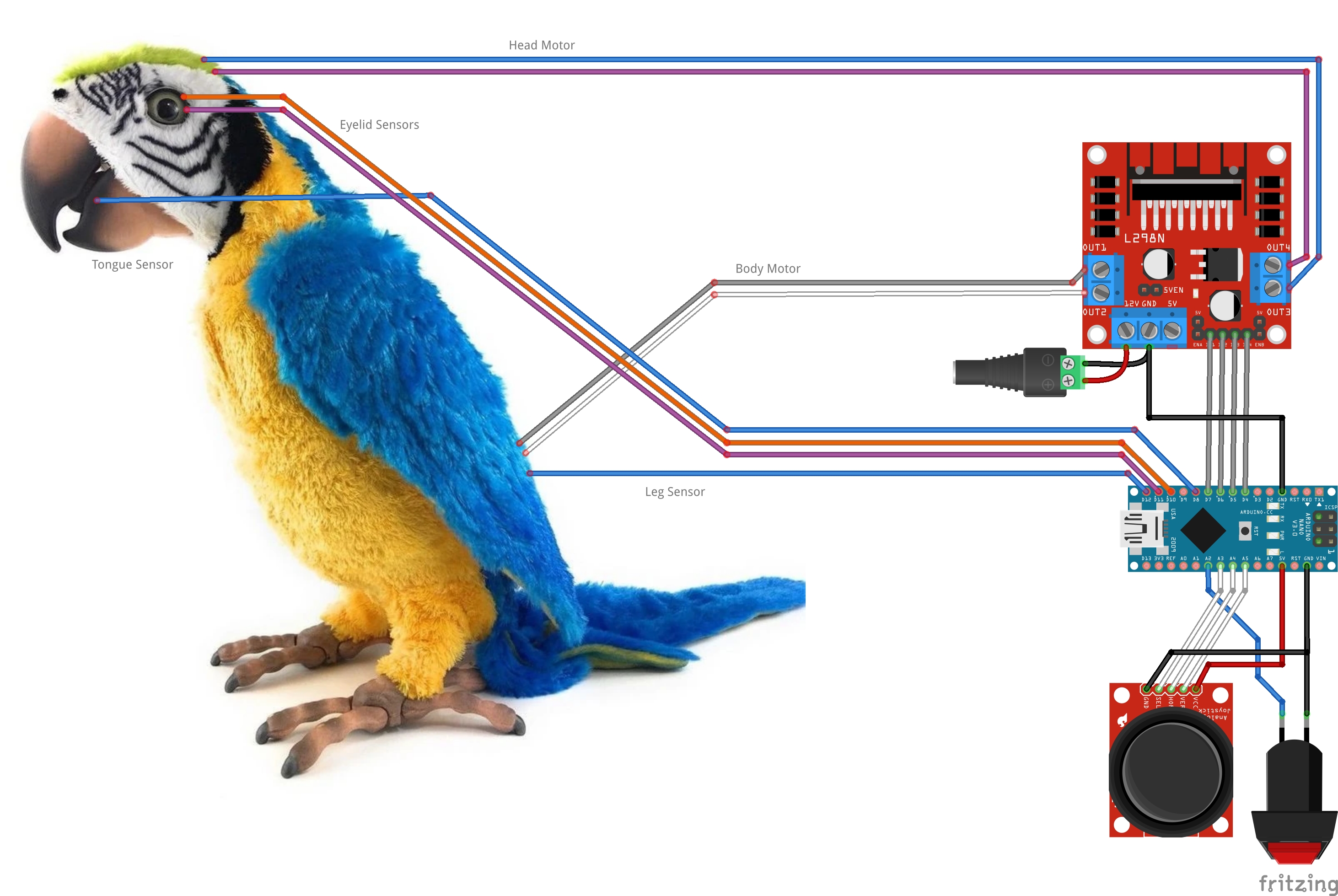
Beachten Sie, dass jeder der illustrierten Sensoren tatsächlich aus einem Kabelpaar besteht - ein Eingangssignal und ein Erdungsdraht (wobei der Controller in Eingabe -Eingabetaste in Eingabe -Eingabetaste für die Eingänge ist, wenn die Eingänge nicht ausgelöst werden). Der Code zur Steuerung eines solchen modifizierten Controllers wird in einer Arduino -Skizze in diesem Repository demonstriert.


