ROScribe
v0.0.4
Erstellen Sie ROS -Pakete mit LLMs.
Roscribe unter Verwendung einer natürlichen Sprachschnittstelle zur Beschreibung von Roboterprojekten beseitigt Roscribe die Fähigkeitsbarriere der Verwendung von ROS für Anfänger und spart Zeit und Ärger für qualifizierte Ingenieure. Roscribe kombiniert die bloße Kraft und Flexibilität von großsprachigen Modellen (LLMs) mit sofortigen Tunings -Techniken, um die Details Ihres Roboterdesigns zu erfassen und automatisch ein ganzes ROS -Paket für Ihr Projekt zu erstellen.
Roscribe baut einen gesamten ROS-Arbeitsbereich über einen agenten-mehrstufigen Ansatz auf, bei dem sich jeder Schritt auf einen bestimmten Aspekt der Roboter-Software-Design konzentriert. Insbesondere hilft Roscribe Ihnen bei den folgenden Schritten:
Wenn Sie neu in ROS sind, ist Roscribe Ihr Roboter (ICS) -Mentor? ️
Wenn Sie ein erfahrener ROS -Benutzer sind, kann Roscribe beim Erstellen einer Blaupause für Ihr ROS -Paket helfen? Umpf
Roscribe besteht aus 4 Wirkstoffen. In der folgenden Liste werden die Verantwortlichkeiten jedes Agenten in der Reihenfolge der Interaktion angegeben:
SpecAgent : Hilft beim Gesamtskelett Ihres Projekts. In ROS-Begriffen erstellt es das ROS-Diagramm Ihres Projekts, wobei jeder Teil des Diagramms entweder mit AI-generiert oder aus einem Open-Source-Reository gezogen werden kann.GenAgent : Angesichts des ROS -Diagramms generiert dieser Agent den ROS -Arbeitsbereich und den Code für jeden ROS -Knoten in Python. Alternativ kann es eine Open-Source-Implementierung für den ROS-Knoten herunterladen.PackAgent : Mit dem Wissen des generierten ROS -Arbeitsbereichs erstellt dieser Agent eine ROS -Startdatei, die die ROS -Knoten zur Sprache bringt. Darüber hinaus werden von diesem Agenten package.xml , CMakeLists.txt und README.md -Dateien generiert.SupportAgent : Dies ist Ihr Kunden Support Agent, der Ihnen helfen kann, wenn Sie beim Ausführen Ihres Projekts einen Fehler aufgetreten sind. Der Agent hat bereits Zugriff auf das Layout des Projekts und kann die generierten Dateien intern lesen. Die folgende Abbildung zeigt die Architektur von Roscribe: 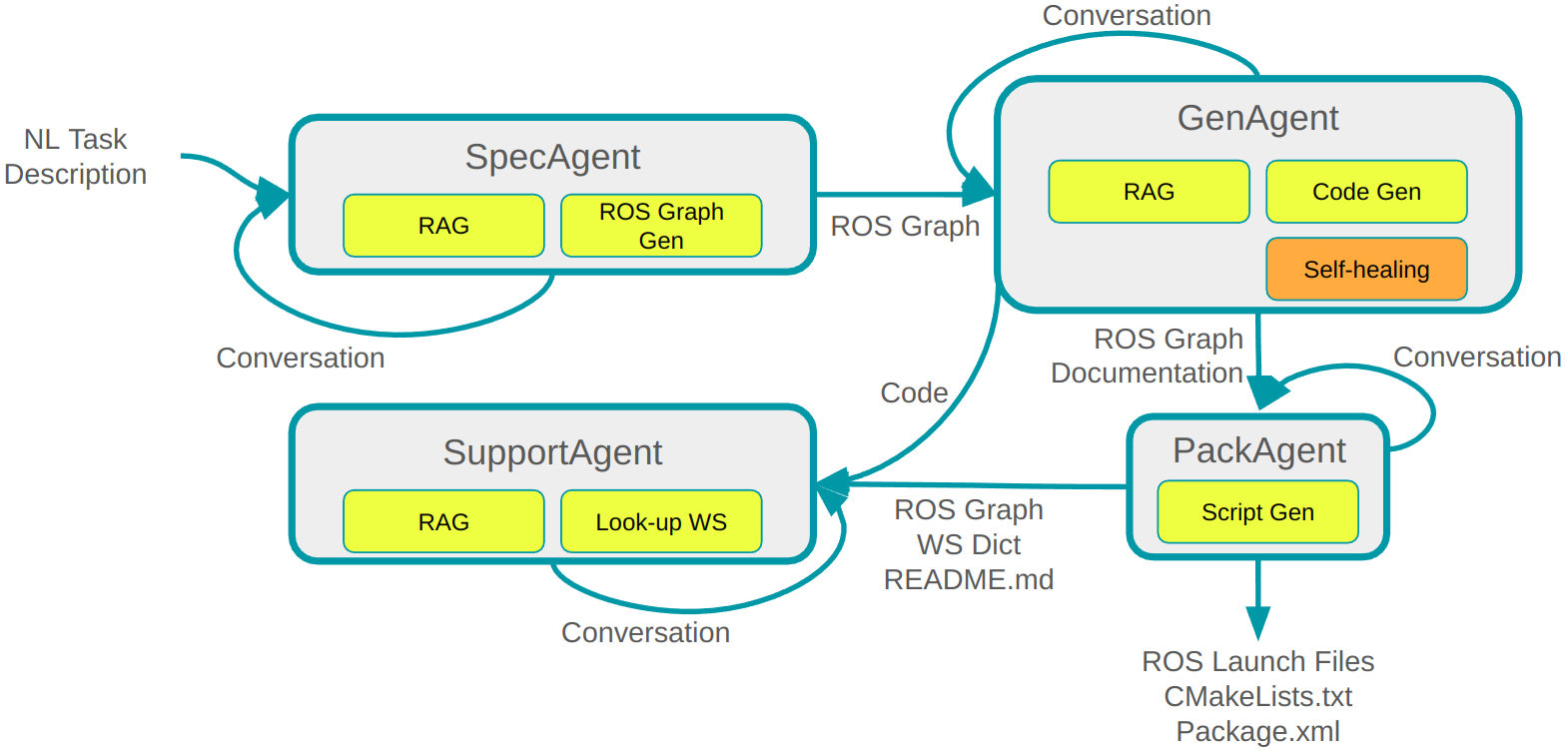
Weitere Informationen finden Sie in unserer Wiki -Seite, um zu erfahren, wie Sie Roscribe in Ihren Robotikprojekten installieren und verwenden:
Schauen Sie in Roscribe und die Idee der LLM-basierten Roboterplattform
Präsentationsfolien von UCSD ROS Workshop 27. Oktober 2023
Videoaufzeichnung der UCSD ROS Workshop -Präsentation 27. Oktober 2023
Für geschäftliche Anfragen wie Beratung oder Vertragsaufträge wenden Sie sich bitte an [email protected].
Als Open-Source-Projekt ermutigen wir alle Robotik-Enthusiasten, zu Roscribe beizutragen. Während jeder Veröffentlichung werden wir die Liste der neuen Mitwirkenden bekannt geben.


