This repository contains the source code for our paper:
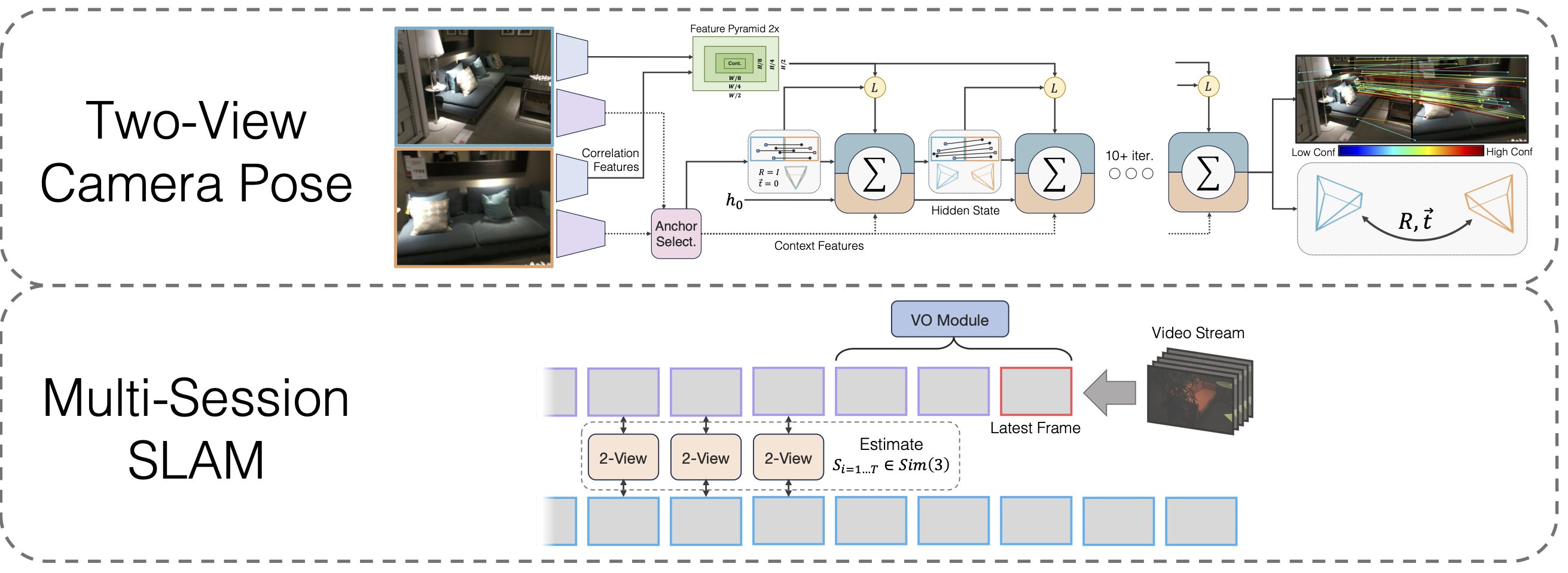
Multi-Session SLAM with Differentiable Wide-Baseline Pose Optimization
Lahav Lipson, Jia Deng
@inproceedings{lipson2024multi,
title={Multi-Session SLAM with Differentiable Wide-Baseline Pose Optimization},
author={Lipson, Lahav and Deng, Jia},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
year={2024}
}
git clone --recursive [email protected]:princeton-vl/MultiSlam_DiffPose.git cd MultiSlam_DiffPose conda env create --file environment.yml --name msdp conda activate msdp
You will also need to install the third party libraries hloc
cd thirdparty/Hierarchical-Localization python -m pip install -e .cd ../..
and eigen
wget https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip unzip eigen-3.4.0.zip -d thirdparty
Finally, run
pip install .
Download model weights
We provide the model weights for the VO backbone, the two-view backbone, and the two-view backbone after homography pre-training:
https://drive.google.com/drive/folders/11iC4ZAmO_mWMUjkpS83HgVcS80hFL-30?usp=sharing
Run conda install jupyter if not done previously.
We provide notebooks to demo our two-view pose method. The function run_model(model, images, intrinsics) outputs a list of intermediate predictions of pose/matches. The last (best) prediction is of the form
To visualize predictions on Scannet / megadepth, follow the two-view data download instructions and run
jupyter notebook demo_scannet_megadepth.ipynb
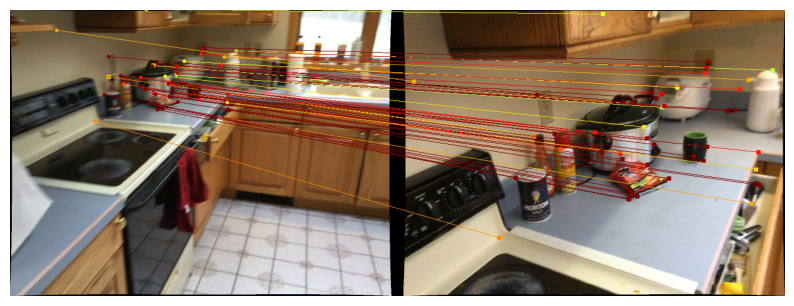
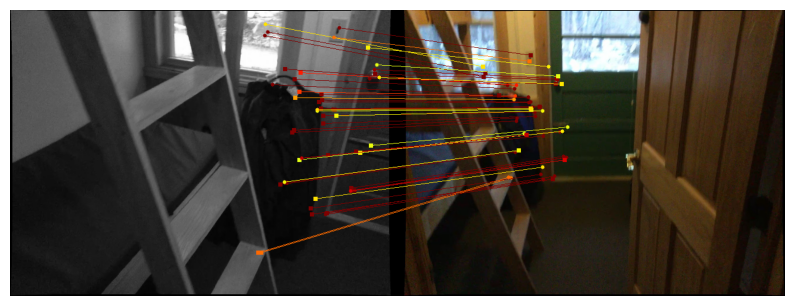
To visualize a prediction on any image pair, edit and run demo_pair.ipynb
jupyter notebook demo_pair.ipynb
Two-View
The authors of LoFTR generously provide the testing sets for Scannet and Megadepth. Download and unpack them intodata/scannet/scannet_test_1500/ and data/megadepth/megadepth_test_1500/, respectively.
untar megadepth_test_1500.tar -C data/megadepth/ untar scannet_test_1500.tar -C data/scannet/
Multi-Session SLAM
EuRoC: Download the sequences from the EuRoC dataset here. Make sure to download the ASL format. Unpack the sequences under data/EuRoC
ETH3D: You can download the sequences from the ETH3D training dataset using their provided script download_eth3d_slam_datasets.py. You can select mono, RGB only. Unpack the sequences under data/ETH3D
Multi-Session SLAM
To evaluate our full Multi-Session SLAM approach on all EuRoC sequence groups, run
python eval_euroc.py 'Vicon 1'python eval_euroc.py 'Vicon 2'python eval_euroc.py 'Machine Hall'python eval_euroc.py 'Machine Hall0-3'
To evaluate our method on the ETH3D sequence groups, run
python eval_eth3d.py sofa python eval_eth3d.py table python eval_eth3d.py plant_scene python eval_eth3d.py einstein python eval_eth3d.py planar
Both scripts follow the same template. Extending the pipeline to new data only requires implementing a dataloader for loading images and intrinsics.
Two-view Pose
To evaluate our two-view pose method on Scannet, run
python evaluate.py --dataset test_scannet --load_ckpt twoview.pth -o ScanNetDatasetWrapper.pad_to_size=840
For Megadepth, run
python evaluate.py --dataset test_megadepth --load_ckpt twoview.pth
Data download
Synthetic Homographies: Run the download script in https://github.com/filipradenovic/revisitop to download the Oxford-Paris distractors dataset. Store the files under data/revisitop1m/jpg/
Scannet/Megadepth: Follow the instructions from the LoFTR training data setup: https://github.com/zju3dv/LoFTR/blob/master/docs/TRAINING.md. Unpack the *_indices.tar into index subfolders.
VO data download: To download the data for training the VO backbone, follow the download instructions from the DROID-SLAM repo.
The full data layout should be as follows:
├── data ├── revisitop1m ├── jpg ├── revisitop1m.txt ├── scannet ├── index ├── scannet_test_1500 ├── train ├── megadepth ├── index ├── scannet_test_1500 ├── train ├── TartanAir ├── abandonedfactory ├── ...
Homography Two-view Pre-training
On one or several A6000s (we used 1), run
python train.py -g train_homog.gin --batch_size 14 --name homog_pretrain mv model_weights/homog_pretrain/step_140000.pth homog_pretrain.pth
Two-view full training
On one or several A6000s (we used 10), run
python train.py -g train_pose.gin --batch_size 12 --name twoview --load_ckpt homog_pretrain.pth mv model_weights/twoview/step_100000.pth twoview.pth
VO training
On one or several A6000s (we used 1), run
python train_vo.py --steps=240000 --lr=0.00008 --name=vo mv checkpoints/vo_240000.pth vo.pth
This project relies on code from existing repositories:
Hierarchical-Localization
LoFTR
DPVO
Pytorch3D
Thank you to the authors for open-sourcing their code


