HayBox
v2.4.0
HayBox is a modular, cross-platform firmware for digital or mixed analog/digital controllers, primarily targeted at B0XX-style controllers.
Features include:
If you want to simply use a pre-built firmware with default pin mappings and configuration, refer to the pre-built binaries section. If you want to make any changes to the code, refer to the building from source section.
.uf2 file), simply put it into bootsel mode while plugging it into your PC, and drag and drop the .uf2 file onto the RPI-RP2 drive that comes up.hex file), you can use a program like QMK Toolbox to flash the .hex file to itThere are currently three main ways to build HayBox:
Both GitHub Actions and GitHub Codespaces require you to create a GitHub account, but do not require you to install any dependencies on your local machine.
The following dependencies are required when building locally:
After installing all of the requirements, download and extract the latest HayBox release, or clone the repository if you have git installed (which makes it easier for you to pull updates).
After that:
git config --global core.longpaths true in any terminal (within VS Code or regular cmd/PowerShell are all fine)
config/<environment>/config.cpp). Any buttons that your controller doesn't have can simply be deleted from the list.HayBox/.pio/build/<environment>/firmware.uf2 onto the RPI-RP2 drive that comes up.This is probably the most convenient way to modify and rebuild HayBox, but bear in mind that GitHub's free tier places some limitations on how much you can use Codespaces each month. Because of this, you will want to make sure you shut down your Codespaces when you aren't using them, in order to maximise what you can get from your quota.
First, create a GitHub account or just log in if you already have one, then fork this repository and open your fork in a new Codespace by clicking the green Code button -> Codespaces -> Create codespace on master. This should open VS Code in your browser with all of the necessary extensions and dependencies pre-installed. From here, the process is much the same as building locally, except you can't use the Upload button to flash the firmware. You will instead have to download the compiled binary from HayBox/.pio/build/<environment>/ and flash it manually (see here for more on that).
This repository contains a GitHub Actions workflow definition that builds each PlatformIO environment specified in the matrix on every push, and uploads firmware binaries as artifacts which you can download by clicking a specific workflow run from the history. You can create a fork of this repository and enable Actions by clicking Settings -> Actions -> General -> Select "Allow all actions and reusable workflows" -> Save.
The fastest way to make changes if you only want to build via GitHub Actions is to use github.dev. You can do so by simply pressing . on your keyboard while you have your fork of this repository open, and it will open a VS Code editor in your browser. This does not give you the same development capabilities that you'd get in a Codespace, but it does allow you to make changes and commit them directly from your browser. Change whatever you'd like, then use the Source Control tab on the left to add, commit, and push your changes. Finally, go back to the repository and click on the Actions tab, click on your workflow run, and wait for it to build the artifact.
If you are adding a new device config/PlatformIO environment, you will have to add the environment to the matrix in order for it to be built by the GitHub Actions workflow. You can also remove any environments from the matrix that you don't care about in order to reduce resource usage and potentially speed up your builds.
To reboot Pico-based controllers into bootsel mode, hold Start on plugin.
To switch to Brook board mode on GCCPCB2, GCCMX, B0XX R2, or LBX, hold B on plugin.
Communication backends are selected slightly differently depending on the type of microcontroller used in the controller.
On Pico/RP2040, USB vs GameCube vs Nintendo 64 is detected automatically. If not plugged into a console, the default is XInput, which should work plug-and-play with most PC games. Other backends are selected by holding one of the following buttons on plugin:
On Arduino/AVR, the DInput backend is selected if a USB connection is detected. Otherwise, it defaults to GameCube backend, unless another backend is manually selected by holding one of the following buttons on plugin:
Unlike other similar firmwares, HayBox by default allows you to switch modes on the fly without unplugging your controller. This is mainly useful on PC, as opposed to console where you usually have to restart the console to switch game anyway. It also serves the purpose of reducing the number of buttons you have to hold with one hand while plugging in.
The default controller mode button combinations are:
Default keyboard mode button combinations (only available when using DInput backend, not with XInput):
HayBox needs a different Dolphin controller profile than the official B0XX firmware, as it
uses different DInput mappings that make more sense for use across multiple games. These
can be found in the dolphin folder in the HayBox repo. The profile files are named to
indicate what communication backend and operating system they are for:
To install the profile:
dolphin folder within HayBox to the folder <YourDolphinInstallation>UserConfigProfilesGCPad (create it if it does not exist)%appdata%Slippi LaunchernetplayUserConfigProfilesGCPad
~/.config/SlippiOnline/Config/Profiles/GCPad/
Cmd + Shift + G and enter the path /Users/<USER>/Library/Application Support/Slippi Launcher/netplay/Slippi Dolphin.app/Contents/Resources/Sys/Config/Profiles/GCPad
%userprofile%DocumentsDolphin EmulatorConfigProfilesGCPad
~/.config/dolphin-emu/Profiles/GCPad/
* macOS only supports DInput (and not very well), so if using a Pico/RP2040-based controller you will have to force DInput mode by holding Z on plugin, and even then it may not work. I can't really do anything about Apple's poor controller support (which they seem to break with every other update) and I don't own any Apple devices, so this will also be considered unsupported usage of HayBox.
The communication backend (e.g. DInput, GameCube, or N64) is selected partly
through auto detection and partly based on the buttons held on plugin. This is
handled in config/<environment>/config.cpp, in the setup() function.
The logic is fairly simple, and even if you don't have programming experience it
shouldn't be too hard to see what's going on and change things if you wish.
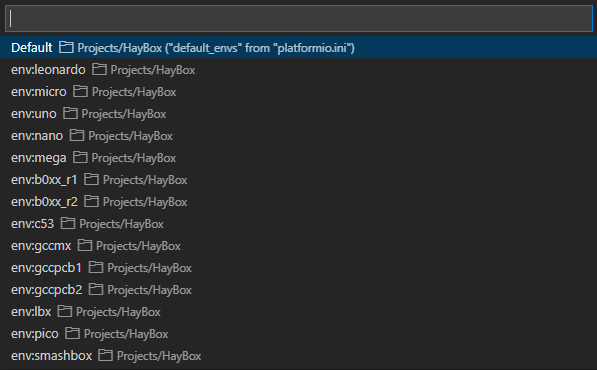
The config folders corresponding to the Arduino environments are:
config/arduino_nativeusb/ for Arduino with native USB support (e.g. Leonardo, Micro)config/arduino/ for Arduino without native USB support (e.g. Uno, Nano, Mega 2560)For Arduino device configs you may notice that the number 125 is passed into
GamecubeBackend(). This lets you change the polling rate e.g. if your DIY
doesn't support native USB and you want to use it with an overclocked GameCube
controller adapter. In that example, you could pass in 1000 to sync up to the
1000Hz polling rate, or 0 to disable this lag fix completely.
Polling rate can be passed into the N64Backend constructor in the same way as this.
You may notice that 1000Hz polling rate works on console as well. Be aware that while this works, it will result in more input lag. The point of setting the polling rate here is so that the GameCube backend can delay until right before the next poll before reading the inputs, so that the inputs are fresh and not outdated.
For Pico/RP2040, it is not necessary to pass in a console polling rate, because the Pico has enough processing power to read/process inputs after receiving the console poll, so there is no need to predict when the poll will arrive and prepare things in advance.
To configure the button holds for input modes (controller/keyboard modes), edit
the select_mode() function in config/mode_selection.hpp. Each if
statement is a button combination to select an input mode.
Most input modes support passing in an SOCD cleaning mode, e.g.
socd::2IP_NO_REAC. See here for the other available modes.
For creating new input modes, it helps if you know some C++, or at least have some programming experience. That said, you should be able to get by even without prior experience if you just base your new mode off the existing ones and refer to them as examples.
There are two types of input modes: ControllerMode and KeyboardMode
Keyboard modes are a little bit simpler so let's start there.
A KeyboardMode behaves as a standard keyboard and should work with any device that supports keyboards.
You are free to use whatever logic and programming tricks you like in the
UpdateKeys() function to decide the outputs based on the input state. You could
create input layers (like the D-Pad layer in Melee mode that is activated when
holding Mod X and Mod Y), or other types of conditional inputs.
The list of available keycodes can be found here.
Remember that keyboard modes can only be activated when using the DInput communication backend (not XInput).
A ControllerMode takes a digital button input state and transforms it into an output state corresponding to a standard gamepad. Any ControllerMode will work with any CommunicationBackend. A CommunicationBackend simply reads inputs from one or more input sources, uses the current ControllerMode to update the outputs based on those inputs, and handles the sending of the outputs to the console or PC.
To create a ControllerMode, you just need to implement the functions
UpdateDigitalOutputs() and UpdateAnalogOutputs().
UpdateDigitalOutputs() is very similar to the UpdateKeys() function in keyboard
modes, with the difference that rather than calling a Press() function to
immediately send inputs, we are simply setting the output state for this
iteration. As the name indicates, we will only deal with the digital outputs in
this function.
UpdateAnalogOutputs() is a bit more complicated. Firstly, it has to call
UpdateDirections() before doing anything else. This function takes in values
indicating whether your left and right sticks are pointing left/right/up/down.
You also pass in the minimum, neutral (centre), and maximum stick analog values,
so you can configure these on a per-mode basis. All this information is used to
automatically set the stick analog values based on the inputs you passed in. This
is all you need to do unless you want to implement modifiers.
UpdateDirections() also populates the variable directions with values
indicating current stick direction, which can be 1, 0, or -1 for the X and Y
axes for both sticks. These values make it much easier to write modifier logic.
After calling UpdateDirections(), add any modifier handling logic that you want.
Remember that UpdateDirections() already set the default analog stick values,
so when handling modifiers you only need to manually set the values for the axes
that are actually being modified. Other than this, I can't teach how to write
your modifier logic, so just look at the examples and play around.
Finally, set any analog trigger values that you need.
Note: Analog trigger outputs could just as well be handled in
UpdateDigitalOutputs(), but I think it usually looks cleaner to keep them
along with the other analog outputs.
Also note: You don't need to worry about resetting the output state or clearing anything from it. This is done automatically at the start of each iteration.
In the constructor of each mode (for controller modes and keyboard modes), you can configure pairs of opposing direction inputs to apply SOCD cleaning to.
For example, in src/modes/Melee20Button.cpp:
_socd_pair_count = 4;
_socd_pairs = new socd::SocdPair[_socd_pair_count]{
socd::SocdPair{&InputState::left, &InputState::right, socd_type},
socd::SocdPair{ &InputState::down, &InputState::up, socd_type},
socd::SocdPair{ &InputState::c_left, &InputState::c_right, socd_type},
socd::SocdPair{ &InputState::c_down, &InputState::c_up, socd_type},
};
This sets up left/right, down/up, C-Left/C-Right, and C-Down/C-Up as pairs of
opposing cardinal directions for which SOCD cleaning will be applied. The SOCD
cleaning is automatically done before UpdateDigitalOutputs() and
UpdateAnalogOutputs(), and you do not need to worry about it any further than
that.
For each SocdPair you can pass in an SocdType of your choosing. By default
for most modes this is passed in as a single constructor parameter, but it is
possible to pass in multiple parameters, or simply use a hardcoded value. Both
of these approaches are exemplified in src/modes/FgcMode.cpp.
SocdType |
Description |
|---|---|
SOCD_NEUTRAL |
Left + right = neutral - the default if no SocdType specified in the SocdPair
|
SOCD_2IP |
Second input priority - left -> left + right = right, and vice versa. Releasing the second direction gives the original direction |
SOCD_2IP_NO_REAC |
Second input priority without reactivation - same as above, except releasing the second direction results in neutral. The original direction must be physically reactuated. |
SOCD_DIR1_PRIORITY |
The first button in the SocdPair always takes priority over the second |
SOCD_DIR2_PRIORITY |
The second button in the SocdPair always takes priority over the first |
SOCD_NONE |
No SOCD resolution - the game decides |
Note that you do not have to implement a HandleSocd() function like in the
Melee20Button and Melee18Button modes. It is only overridden in these modes
so that we can check if left and right are both held before SOCD cleaning,
because when they are both held (without a vertical direction being held) we
need to override all modifiers.
If your controller has no lightshield buttons, you may want to use Mod X for lightshield and put shield tilt on R instead. You can do this by using the Melee18Button mode instead of Melee20Button.
The Melee20Button and Melee18Button modes provide a choice of which coordinates to use when pressing down + right. By default, holding down + back will allow you to do automatic jab-cancels, which is a useful technique for some characters.
Another popular technique that uses the down + right diagonal is the so-called crouch/walk option-select. This technique involves holding down + forward at a certain angle while crouching, such that after crouch-cancelling an attack you will automatically start walking towards your opponent instead of going back into crouch. This can be very useful for tech-chasing, but the coordinates used for this technique do not allow you to auto jab-cancel.
This can be configured as seen in config/mode_selection.hpp by setting the crouch_walk_os option to true:
new Melee20Button(socd::SOCD_2IP_NO_REAC, { .crouch_walk_os = false })
You will also have to change this in your config/<environment>/config.cpp in order for it to be applied on plugin, as mode_selection.hpp only controls what happens when you switch mode.
The ProjectM mode has some extra options to configure certain behaviours. As seen
in config/mode_selection.hpp:
new ProjectM(
socd::SOCD_2IP_NO_REAC,
{ .true_z_press = false, .ledgedash_max_jump_traj = true }
)
Firstly, the ledgedash_max_jump_traj option allows you to enable or disable the behaviour
borrowed from Melee mode where holding left and right (and no vertical directions)
will give a 1.0 cardinal regardless of modifiers being held.
If you change the SOCD mode to 2IP (with reactivation), you should also change this option to false if you want a smooth gameplay experience.
Secondly, the true_z_press option exists because Project M/Project+ do not handle
Z presses the same way Melee does.
Melee interprets a Z press as lightshield + A, and thus it can be used for L
cancelling without locking you out of techs. In PM/P+, a Z press will trigger a
tech and thus cause unwanted tech lockouts if used to L cancel.
By default in HayBox, the ProjectM mode is set to use a macro of lightshield + A
in order to preserve expected behaviour from Melee. However, this macro does not
enable you to use tether/grapple attacks or grab items. To workaround this, you
can press Mod X + Z to send a true Z input.
If this bothers you, and you just want to send a true Z input by default when
pressing Z, you can set the true_z_press option to true.
HayBox supports several input sources that can be read from to update the input state:
GpioButtonInput - The most commonly used, for reading switches/buttons connected directly to GPIO pins. The input mappings are defined by an array of GpioButtonMapping as can be seen in almost all existing configs.SwitchMatrixInput - Similar to the above, but scans a keyboard style switch matrix instead of individual switches. A config for Crane's Model C<=53 is included at config/c53/config.cpp which serves as an example of how to define and use a switch matrix input source.NunchukInput - Reads inputs from a Wii Nunchuk using i2c. This can be used for mixed input controllers (e.g. left hand uses a Nunchuk for movement, and right hand uses buttons for other controls)GamecubeControllerInput - Similar to the above, but reads from a GameCube controller. Can be instantiated similarly to GamecubeBackend. Currently only implemented for Pico, and you must either run it on a different pio instance (pio0 or pio1) than any instances of GamecubeBackend, or make sure that both use the same PIO instruction memory offset.Each input source has a "scan speed" value which indicates roughly how long it takes for it to read inputs. Fast input sources are always read at the last possible moment (at least on Pico), resulting in very low latency. Conversely, slow input sources are typically read quite long before they are needed, as they are too slow to be read in response to poll. Because of this, it is more ideal to be constantly reading those inputs on a separate core. This is not possible on AVR MCUs as they are all single core, but it is possible (and easy) on the Pico/RP2040. The bottom of the default Pico config config/pico/config.cpp illustrates this by using core1 to read Nunchuk inputs while core0 handles everything else. See the next section for more information about using core1.
In each config's setup() function, we build up an array of input sources, and then pass it into a communication backend. The communication backend decides when to read which input sources, because inputs need to be read at different points in time for different backends. We also build an array of communication backends, allowing more than one backend to be used at once. For example, in most configs, the B0XX input viewer backend is used as a secondary backend whenever the DInput backend is used. In each iteration, the main loop tells each of the backends to send their respective reports. In future, there could be more backends for things like writing information to an OLED display.
In each config, there are the functions setup() and loop(), where setup() runs first, and then loop() runs repeatedly until the device is powered off.
On Pico/RP2040, the setup() and loop() functions execute on core0, and you can add the functions setup1() and loop1() in order to run tasks on core1.
For example, to read GameCube controller inputs on core1:
GamecubeControllerInput *gcc = nullptr;
void setup1() {
while (backends == nullptr) {
tight_loop_contents();
}
gcc = new GamecubeControllerInput(gcc_pin, 2500, pio1);
}
void loop1() {
if (backends != nullptr) {
gcc->UpdateInputs(backends[0]->GetInputs());
}
}
The while loop makes sure we wait until setup() on core0 has finished setting up the communication backends. We then create a GameCube controller input source with a polling rate of 2500Hz. We also run it on pio1 as an easy way to avoid interfering with any GameCube/N64 backends, which use pio0 unless otherwise specified. In loop1() we make the assumption that the primary backend is the first element of the backends array (which is configured in the same file anyway, so we aren't truly assuming anything we don't know) and directly scan the GameCube controller inputs into the backend's input state.
As a slightly crazier hypothetical example, one could even power all the controls for a two person arcade cabinet using a single Pico by creating two switch matrix input sources using say 10 pins each, and two GameCube backends, both on separate cores. The possibilities are endless.
If you are using an official adapter with an Arduino-based controller you will likely have to hold A on plugin which disables the polling latency optimisation by passing in a polling rate of 0 to the GamecubeBackend constructor.
If you are using an Arduino-based controller without a boost circuit, you will need 5V power so for Mayflash adapter you need both USB cables plugged in, and on console the rumble line needs to be intact. Pico works natively with 3.3V power so this isn't an issue.
I welcome contributions and if you make an input mode that you want to share, feel free to make a pull request. Please install the clang-format plugin for VS Code and use it to format any code you want added.
We use SemVer for versioning. For the versions available, see the tags on this repository.
See also the list of contributors who participated in this project.
This project is licensed under the GNU GPL Version 3 - see the LICENSE file for details


