ros agents
0.3.1

ROS Agents is a fully-loaded framework for creating interactive embodied agents that can understand, remember, and act upon contextual information from their environment.
Checkout Installation Instructions
Get started with the Quickstart Guide
Get familiar with Basic Concepts
Dive right in with Examples
ROS Agents is built to be used with ROS2. All ROS distributions starting from Iron are supported. Install ROS2 by following the instructions on the official site.
The core of ROS Agents is agnostic to model serving platforms. It currently supports Ollama and RoboML. Please install either of these by following the instructions provided by respective projects. Support for new platforms will be continuously added. If you would like to support a particular platform, please open an issue/PR.
Binary packages for Ubuntu will be released soon. Check this space.
Install python dependencies
pip install pillow numpy opencv-python-headless 'attrs>=23.2.0' jinja2 httpx setproctitle msgpack msgpack-numpy numpy-quaternionDownload ROS Sugar
git clone https://github.com/automatika-robotics/ros-sugargit clone https://github.com/automatika-robotics/ros-agents.git
cd ..
colcon build
source install/setup.bash
python your_script.pyUnlike other ROS package, ROS Agents provides a pure pythonic way of describing the node graph using ROS Sugar. Copy the following code in a python script and run it.
from agents.clients.ollama import OllamaClient
from agents.components import MLLM
from agents.models import Llava
from agents.ros import Topic, Launcher
# Define input and output topics (pay attention to msg_type)
text0 = Topic(name="text0", msg_type="String")
image0 = Topic(name="image_raw", msg_type="Image")
text1 = Topic(name="text1", msg_type="String")
# Define a model client (working with Ollama in this case)
llava = Llava(name="llava")
llava_client = OllamaClient(llava)
# Define an MLLM component (A component represents a node with a particular functionality)
mllm = MLLM(
inputs=[text0, image0],
outputs=[text1],
model_client=llava_client,
trigger=[text0],
component_name="vqa"
)
# Additional prompt settings
mllm.set_topic_prompt(text0, template="""You are an amazing and funny robot.
Answer the following about this image: {{ text0 }}"""
)
# Launch the component
launcher = Launcher()
launcher.add_pkg(components=[mllm])
launcher.bringup()And just like that we have an agent that can answer questions like 'What do you see?'. To interact with this agent, ROS Agents includes a tiny web client. Checkout the Quick Start Guide to learn more about how components and models work together.
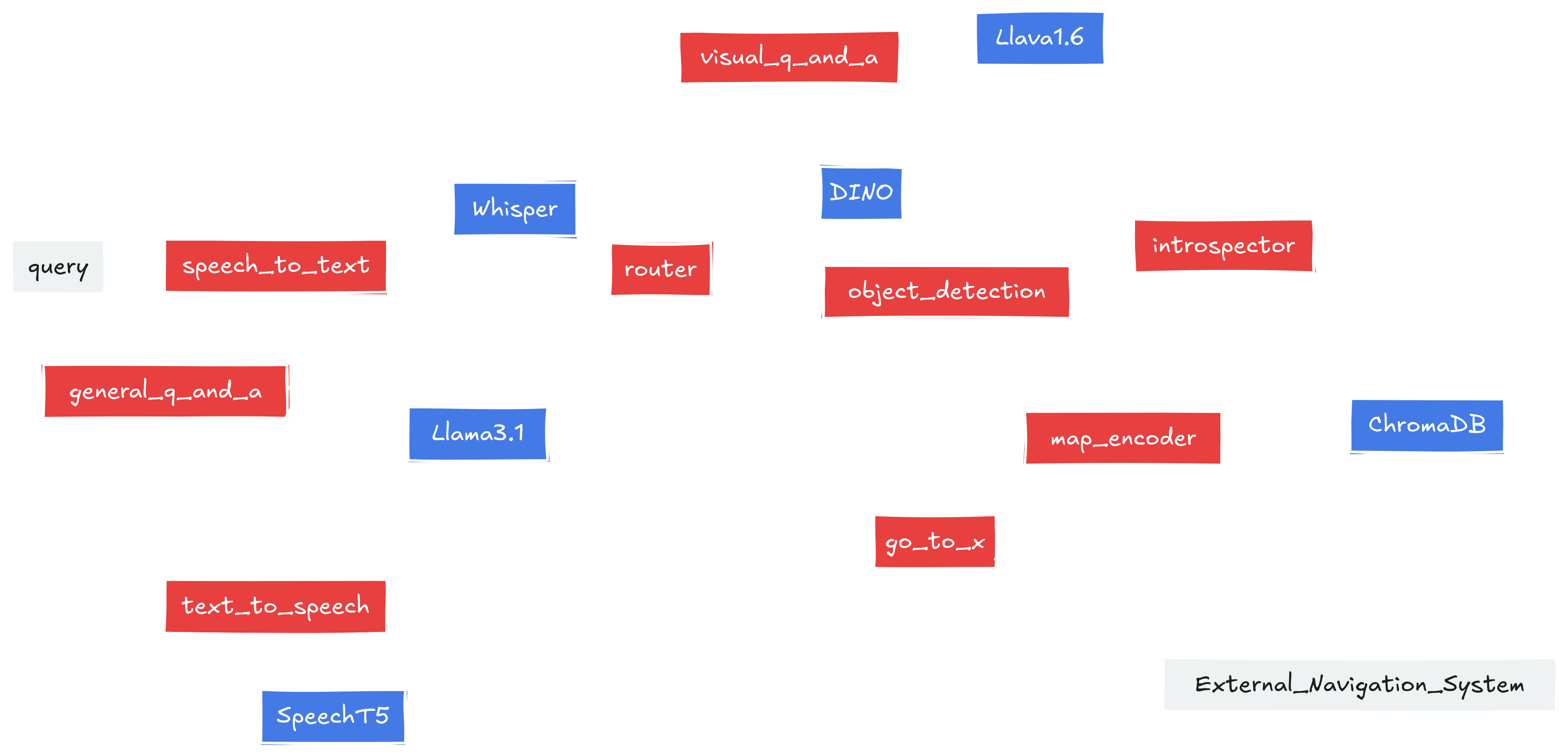
The quickstart example above is just an amuse-bouche of what is possible with ROS Agents. In ROS Agents we can create arbitrarily sophisticated component graphs. And furthermore our system can be configured to even change or reconfigure itself based on events internal or external to the system. Check out the code for the following agent here.
The code in this distribution is Copyright (c) 2024 Automatika Robotics unless explicitly indicated otherwise.
ROS Agents is made available under the MIT license. Details can be found in the LICENSE file.
ROS Agents has been developed in collaboration betweeen Automatika Robotics and Inria. Contributions from the community are most welcome.


