SquawkersMcGraw
1.0.0
Reverse engineering and remixing the Hasbro FurReal Friend "Squawkers McGraw" animatronic parrot

 |
 |
 |
There are a variety of switches and sensor inputs, as follows:
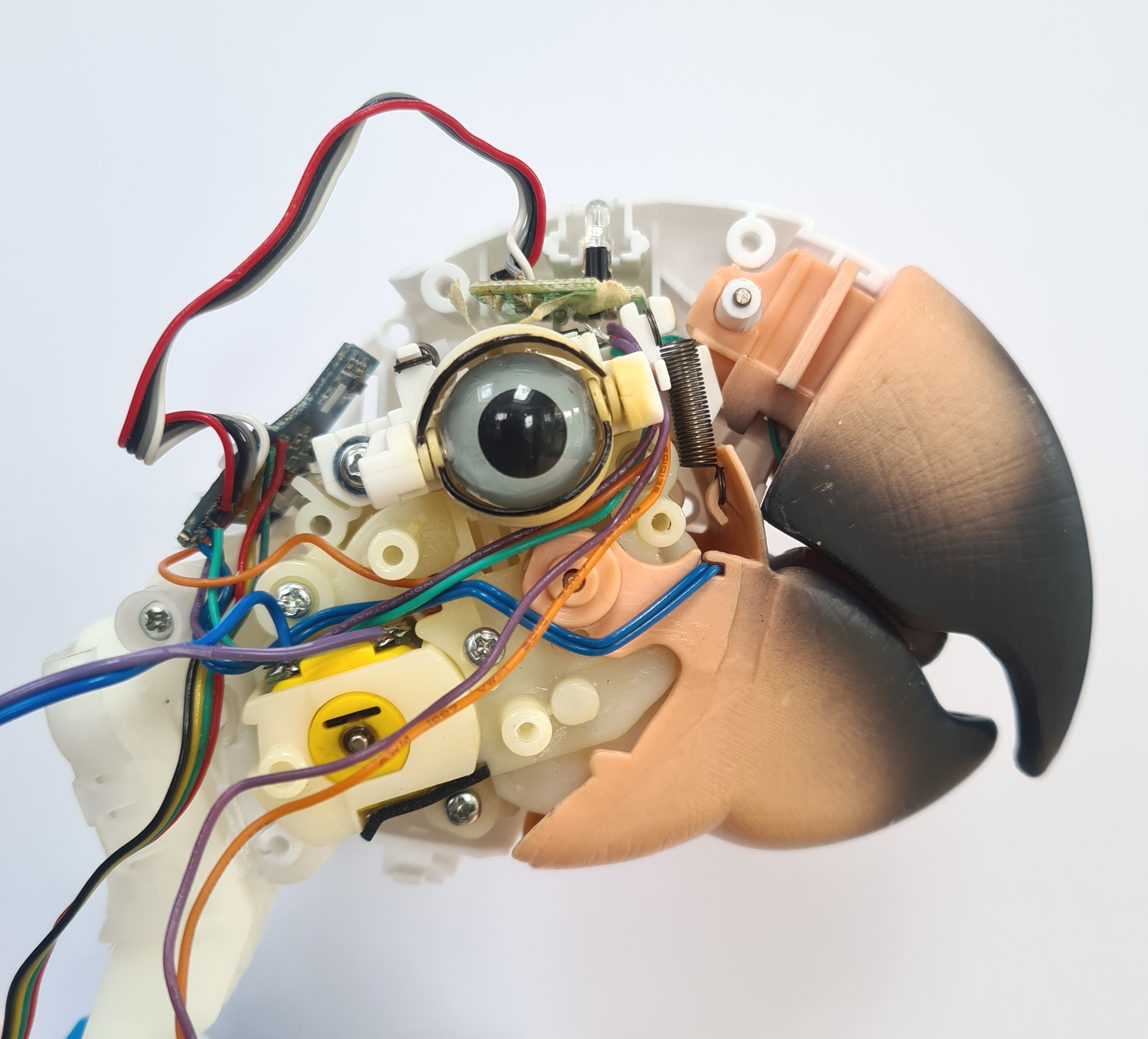
All the movements are controlled via only two DC hobby motors. By using a clever CAM system, reversing the direction of the motors can trigger different actuators.

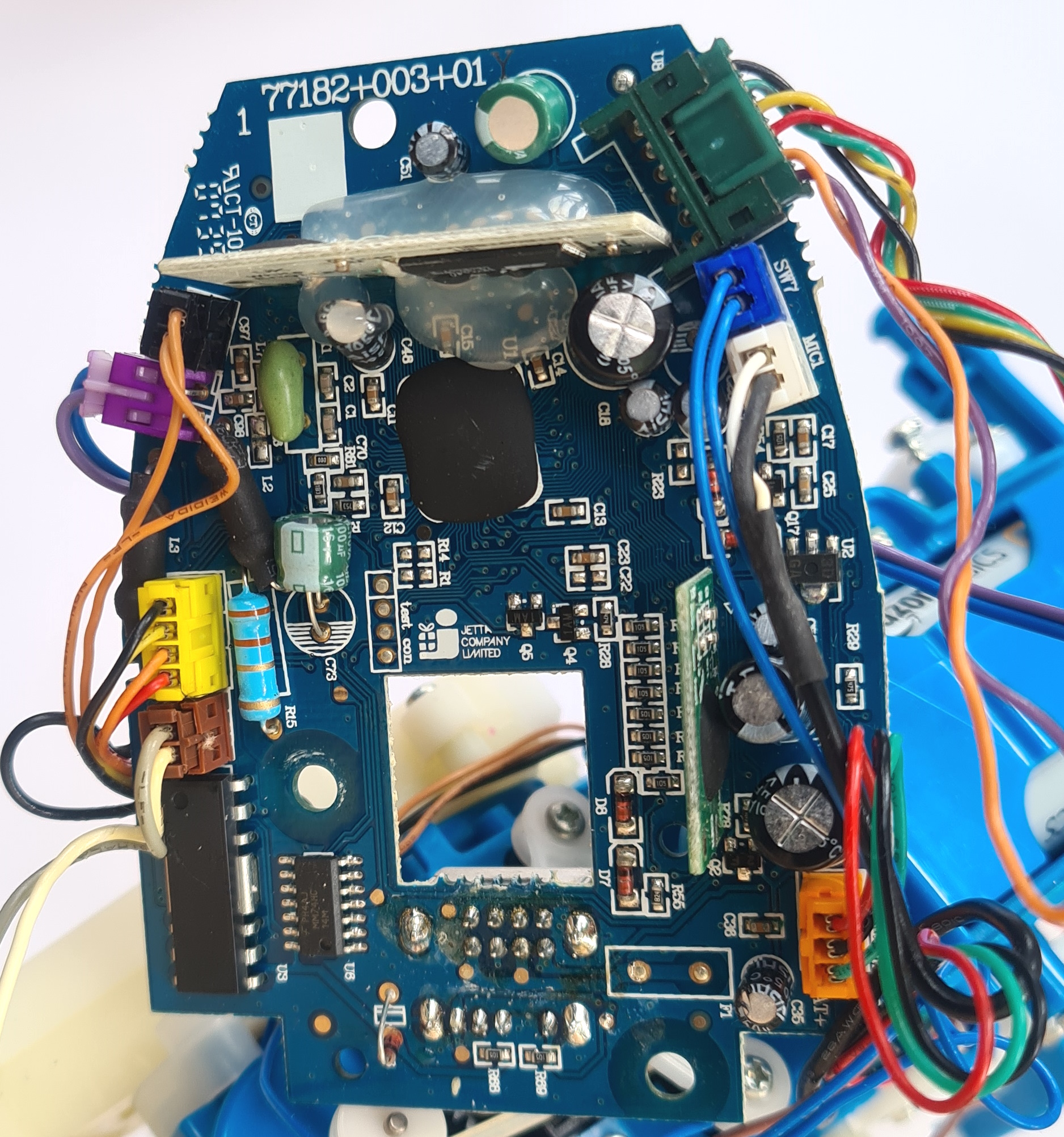
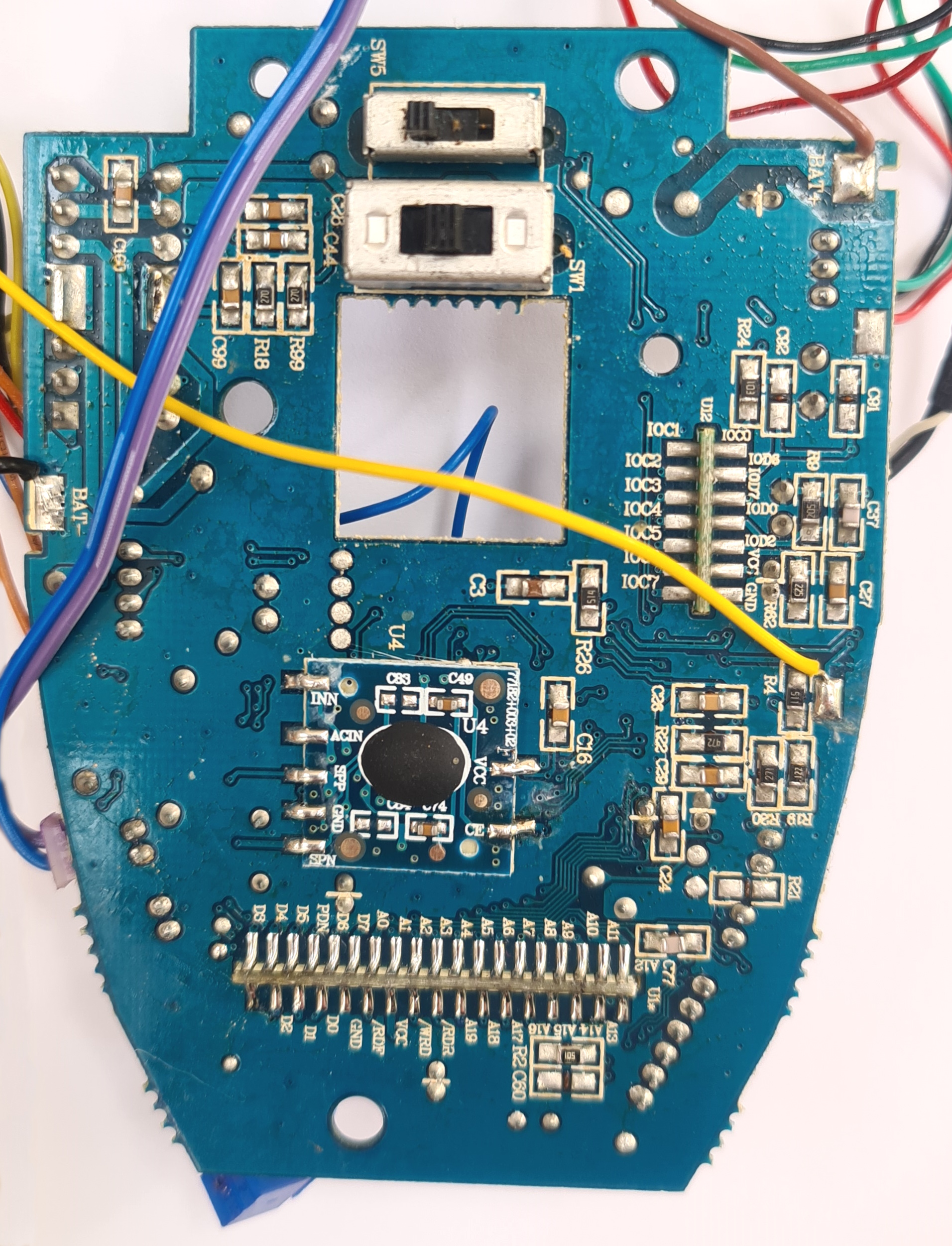
The controller has a three position switch, three play mode buttons, 6 program buttons, and a custom record button. It appears to broadcast command strings using the common 38kHz carrier frequency. For a non-destructive method of controlling Squawkers McGraw, you can simply transmit these same command codes to trigger any of the built-in behaviours.
The following command strings were grabbed using an Arduino and the InfraRed signal analyser code described at https://www.patreon.com/posts/infrared-puzzle-28343366
// Repeat Button
unsigned int repeatData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1100,2000,2000,1000,1000,2000,2000,1000,1100,2000,2000,1000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
// Custom Record [same as Response]
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,2000,1000,1100,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
To completely customise the parrot's behaviour requires a more destructive modification - breaking the connections to the control board and instead wiring the inputs and outputs to a processor such as an Arduino, as follows:
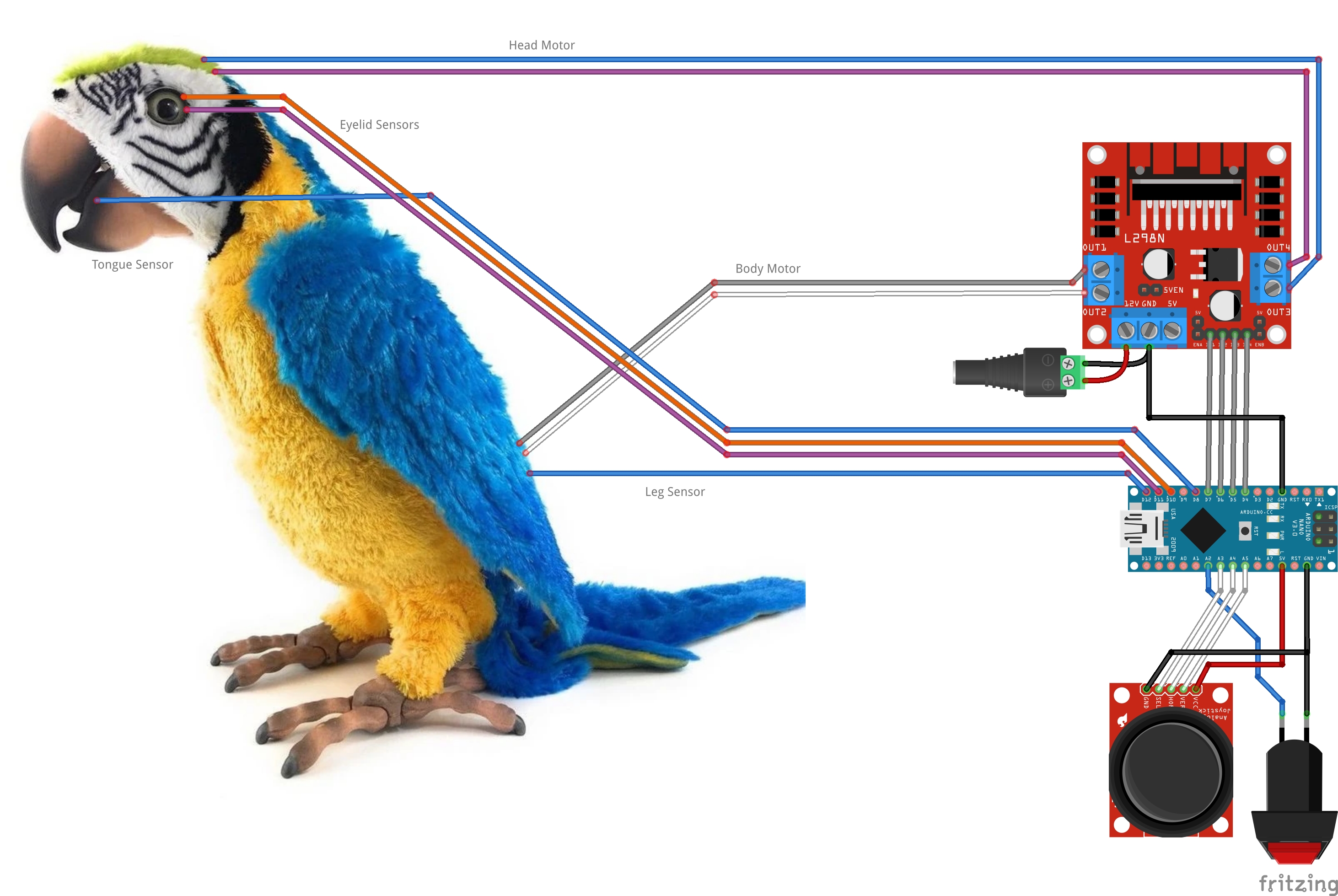
Note that each of the sensors illustrated actually consists of a pair of wires - one input signal, and one ground wire (with the controller having onboard INPUT_PULLUPs for when the inputs are not triggered). The code used to control such a modified controller is demonstrated in an Arduino .ino sketch in this repository.


