3DObjectTracking
1.0.0
Seguir objetos y estructuras cinemáticas en el espacio 3D y determinar sus poses y configuraciones es una tarea esencial en la visión por computadora. Su aplicación abarca desde la realidad aumentada hasta la percepción robótica. Dados fotogramas de imagen consecutivos, así como mallas 3D e información cinemática, el objetivo es estimar de forma sólida la rotación y traslación de todos los cuerpos en relación con una cámara. Si bien el problema se ha estudiado a fondo, todavía existen muchos desafíos, como oclusiones parciales, cambios de apariencia, desenfoque de movimiento, desorden de fondo, ambigüedad de objetos y requisitos de tiempo real.
En este repositorio, publicaremos continuamente algoritmos y códigos de nuestra investigación en curso sobre el seguimiento de objetos 3D. Las carpetas de los diferentes algoritmos incluyen todo lo necesario para reproducir los resultados presentados en nuestros artículos. Tenga en cuenta que el código de cada artículo nuevo también incluye una versión actualizada del trabajo anterior. Si desea utilizar nuestro rastreador en su propio proyecto o aplicación, utilice el código de la última publicación. Actualmente, la última versión de nuestro código se puede encontrar en la carpeta M3T .

Un marco de seguimiento de cuerpos múltiples: desde objetos rígidos hasta estructuras cinemáticas

Fusión de apariencia visual y geometría para seguimiento de objetos 6DoF multimodal
Presentación CVPR 2022

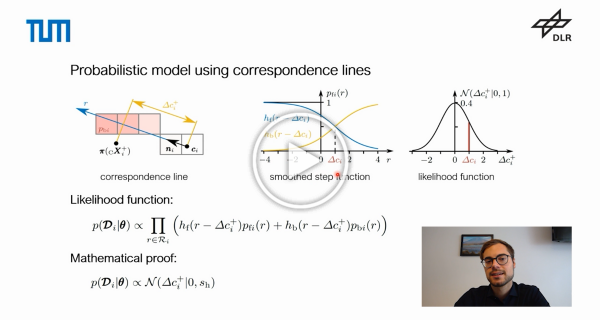
Geometría correspondiente iterativa
Presentación Oral ACCV 2020
Un enfoque gaussiano escaso para el seguimiento de objetos 6DoF basado en regiones
Un enfoque gaussiano escaso para el seguimiento de objetos 6DoF basado en regiones


