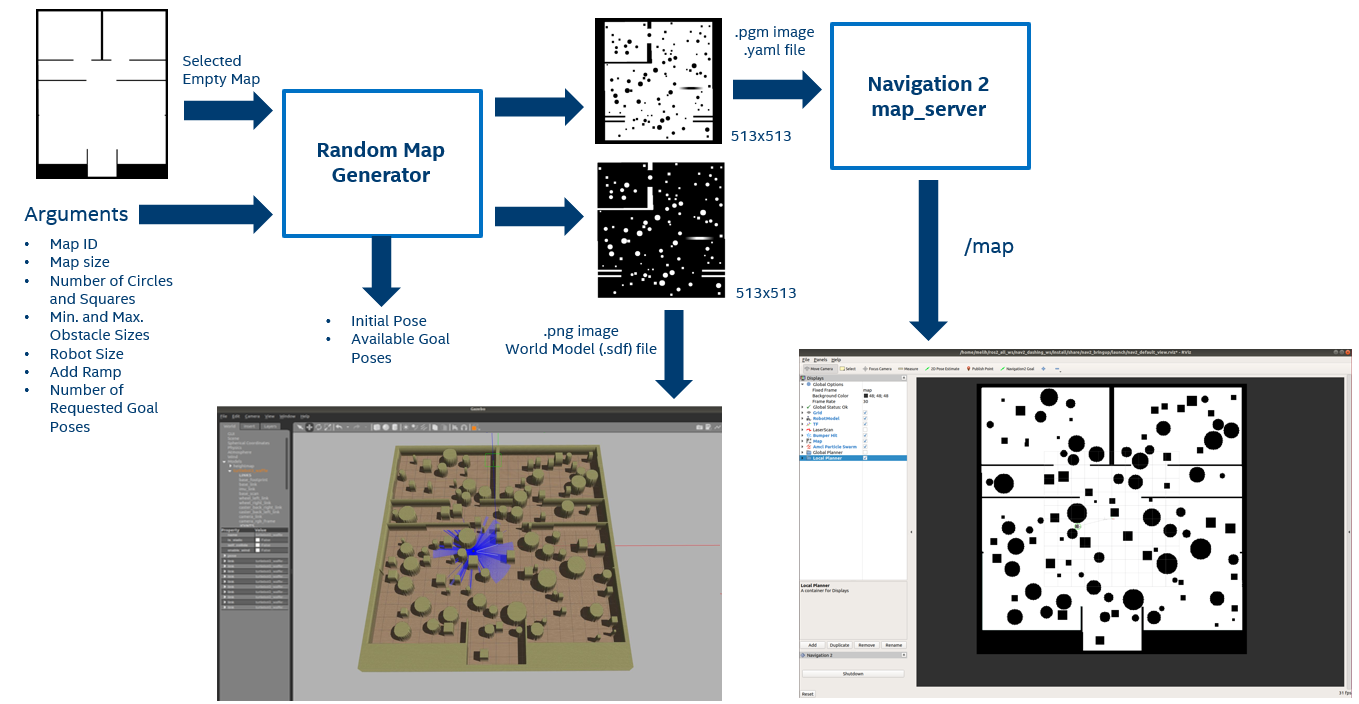
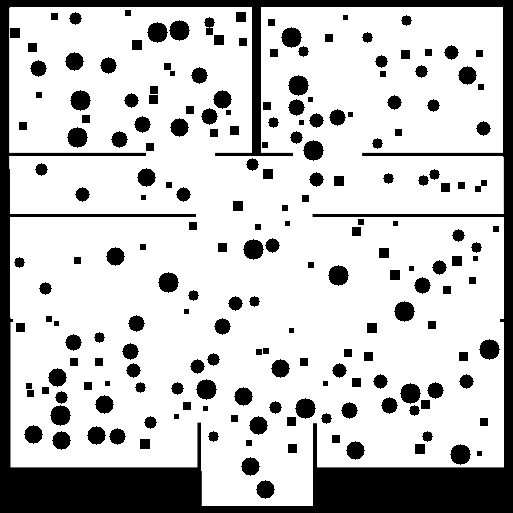
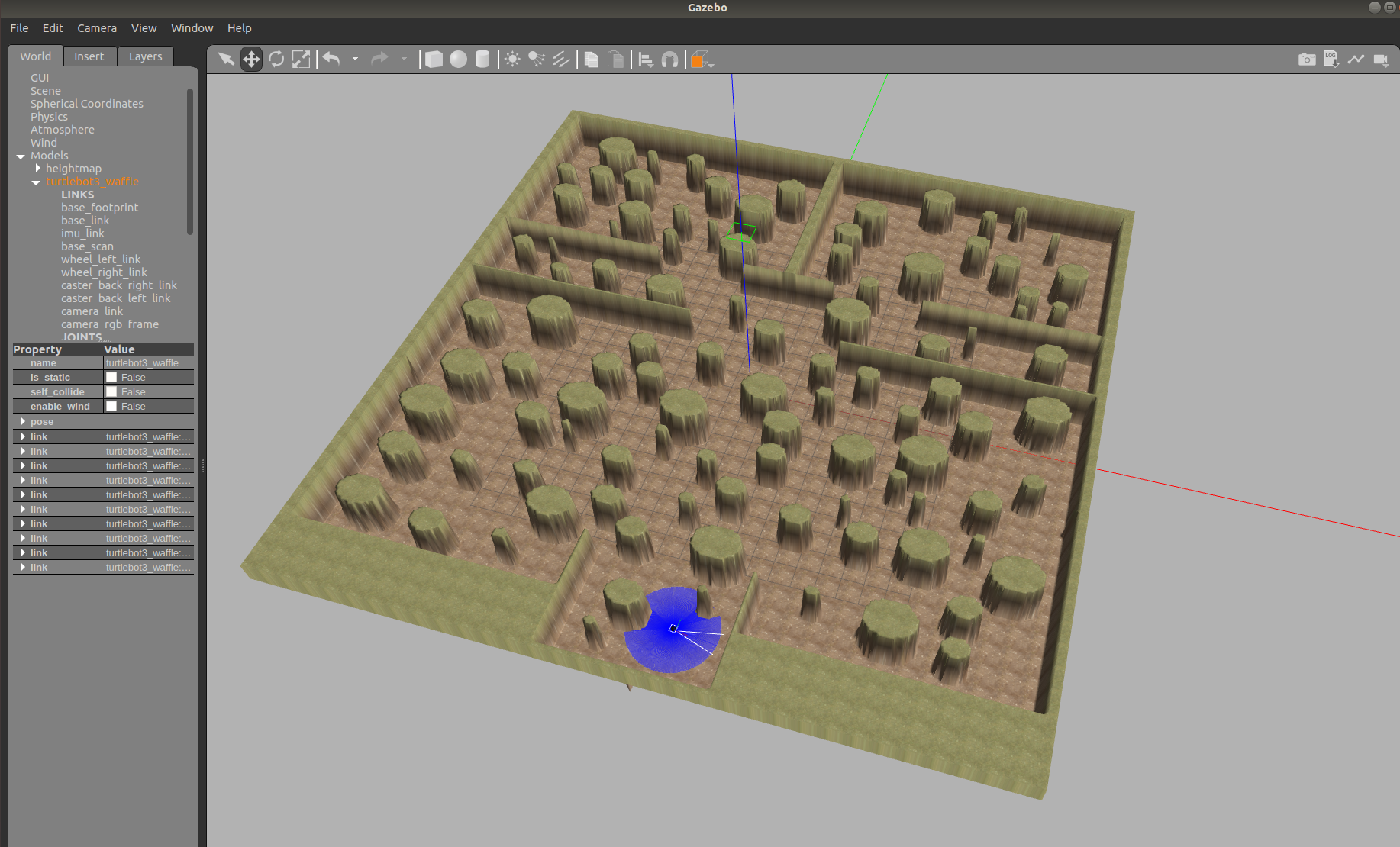
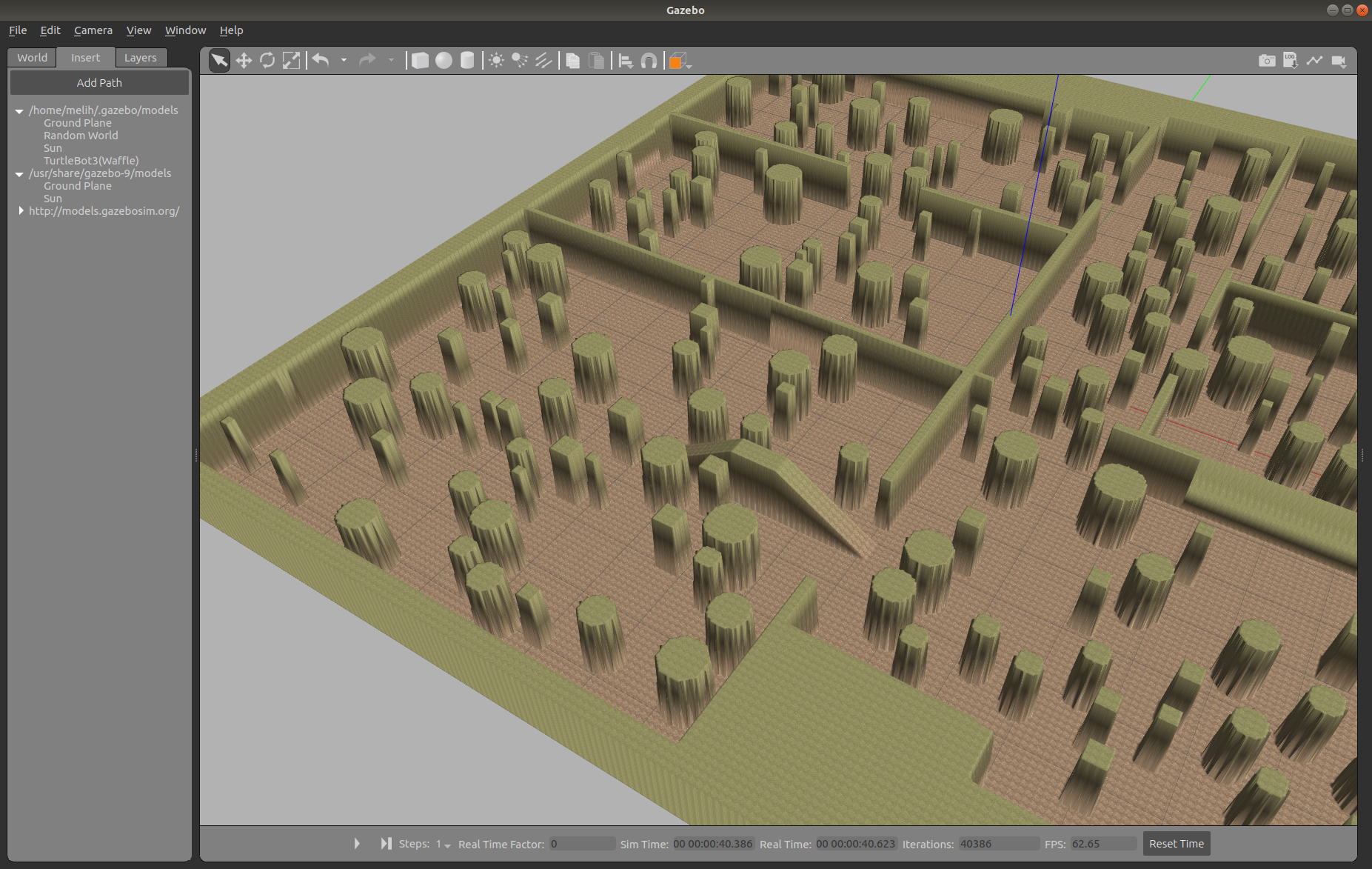
Esta herramienta crea mapas y modelos mundiales generados aleatoriamente que pueden ser utilizados por Navigation 2 y Gazebo. Utiliza una pequeña parte del conjunto de datos de HouseExpo. Es un conjunto de imágenes de diseño interior vacías dibujadas a mano en 2D. Los mapas vacíos se encuentran en el directorio de mapas. El generador de mapas aleatorios coloca obstáculos al azar en mapas en escala de grises. Los mapas deben estar en formato .png. Actualmente, se admite la adición de círculos, cuadrados y rampas. El usuario puede configurar el tamaño, la forma, el tipo y la distancia entre obstáculos. El mapa de altura de Gazebo se utiliza para crear un modelo mundial de Gazebo de un mapa generado aleatoriamente. El directorio random_world se puede copiar en el directorio .gazebo/model para usarlo con Gazebo. El tamaño del mapa generado debe ser 2^n+1 x 2^n+1. De lo contrario, no funcionará con Gazebo. El tamaño del modelo mundial en Gazebo está escalado a 20 metros x 20 metros.
sudo apt-get update
sudo apt-get upgrade
Instalar OpenCV
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libopencv-dev
cd nav2_random_map_generator
make
o
cd src
g++ circle.cpp main.cpp map.cpp obstacle.cpp ramp.cpp rmg.cpp square.cpp -o random-map `pkg-config --cflags --libs opencv`
./map_generator <Map Id> <Number_of_Circles> <Number_of_Squares> <Robot_Size (px*0.03898)> <Map_Size(x)> <Map_Size(y)> <Min_Circle_Radius> <Max_Circle_Radius> <Min Square_Size> <Max_Circle_Radius> <Add Ramp> <Show_Map>
Ejemplo:
./map_generator 10 200 200 5 513 513 5 10 5 10 1 1
./map_generator h
Vídeo de prueba de Ramdom Map TB3
Vídeo de prueba de rampa del mapa Ramdom


