Event Beacon Communication
1.0.0
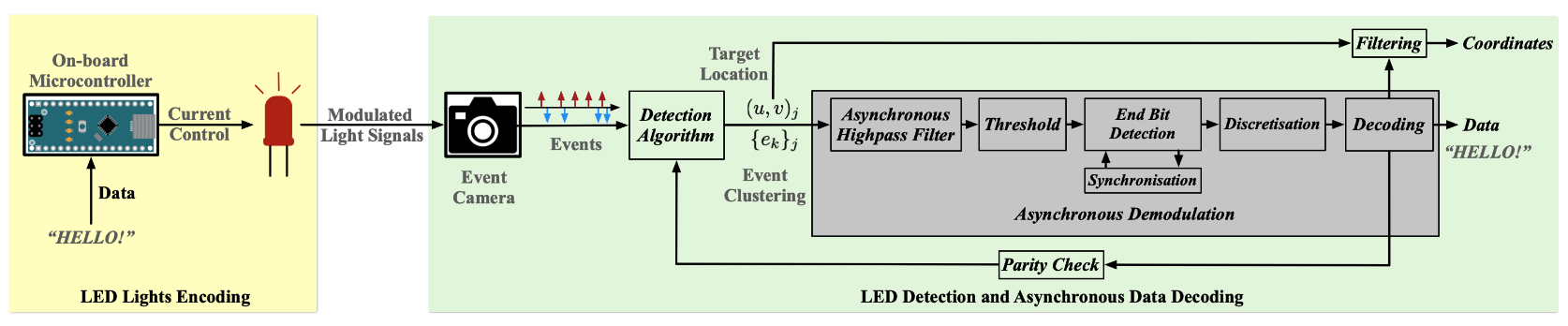
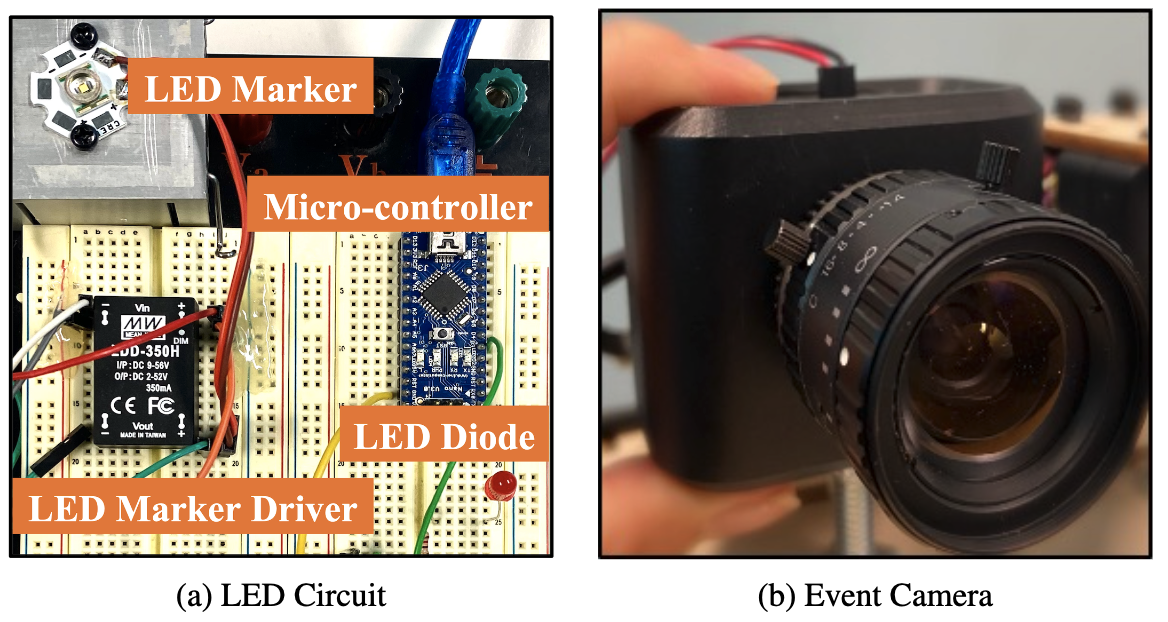
Las cámaras de eventos son sensores de visión dinámica biológica que responden a los cambios en la intensidad de la imagen con una alta resolución temporal, un alto rango dinámico y baja latencia. Estas características del sensor son ideales para permitir el seguimiento de objetivos visuales en concierto con un canal de comunicación visual de transmisión para balizas visuales inteligentes con aplicaciones en robótica distribuida. Las balizas visuales se pueden construir mediante modulación de alta frecuencia de diodos emisores de luz (LED), como faros del vehículo, LED de Internet de las cosas (IoT), luces de construcción inteligentes, etc., que ya están presentes en muchos escenarios del mundo real. La alta resolución temporal característica de las cámaras de eventos les permite capturar señales visuales a velocidades de datos mucho más altas en comparación con las cámaras clásicas basadas en marco. En este artículo, proponemos una nueva arquitectura de baliza visual inteligente con modulación LED y algoritmos de demodulación de la cámara de eventos. Evaluamos cuantitativamente la relación entre la velocidad de transmisión LED, la distancia de comunicación y la precisión de la transmisión de mensajes para el sistema de comunicación Smart Visual Beacon que prototipos. El método propuesto logra hasta 4 kbps en un entorno interior y una transmisión sin pérdidas a una distancia de 100 metros, a una velocidad de transmisión de 500 pb, a plena luz del sol, lo que demuestra el potencial de la tecnología en un entorno al aire libre.
Ziwei Wang, Yonhon Ng, Jack Henderson y Robert Mahony
El documento fue aceptado por la Conferencia Internacional IEEE sobre robots y sistemas inteligentes (IROS 2022) en Kioto, Japón.
[Documento de conferencia] [Arxiv Preprint]
Si usa o discute nuestro algoritmo o conjuntos de datos, cite nuestro documento de la siguiente manera:
@InProcedings {wang22iros,
Autor = {Ziwei Wang y Yonhon Ng y Jack Henderson y Robert Mahony},
title = {Smart Visual Beacons con comunicaciones ópticas asíncronas usando cámaras de eventos},
booktitle = {"Conferencia internacional sobre robots y sistemas inteligentes (IROS 2022)"},
año = {2022}
}
Ejecute decoder.m , cargará datos de eventos de ./data. El código de decodificación decoder.m Mensaje decodificado y tasa de precisión (tasa de precisión del mensaje y tasa de precisión de bits).
Si tiene alguna pregunta o sugerencia, no dude en ponerse en contacto con [email protected]


