3DObjectTracking
1.0.0
Suivre des objets et des structures cinématiques dans l’espace 3D et déterminer leurs poses et configurations est une tâche essentielle en vision par ordinateur. Son application va de la réalité augmentée à la perception robotique. Étant donné des images consécutives, ainsi que des maillages 3D et des informations cinématiques, l'objectif est d'estimer de manière robuste la rotation et la translation de tous les corps par rapport à une caméra. Bien que le problème ait été étudié de manière approfondie, de nombreux défis tels que les occultations partielles, les changements d'apparence, le flou de mouvement, le fouillis d'arrière-plan, l'ambiguïté des objets et les exigences en temps réel existent toujours.
Dans ce référentiel, nous publierons en permanence les algorithmes et le code de nos recherches en cours sur le suivi d'objets 3D. Les dossiers des différents algorithmes comprennent tout le nécessaire pour reproduire les résultats présentés dans nos articles. Notez que le code de chaque nouvel article inclut également une version mise à jour des travaux précédents. Si vous souhaitez utiliser notre tracker dans votre propre projet ou application, veuillez utiliser le code de la dernière publication. Actuellement, la dernière version de notre code se trouve dans le dossier M3T .

Un cadre de suivi multi-corps - Des objets rigides aux structures cinématiques

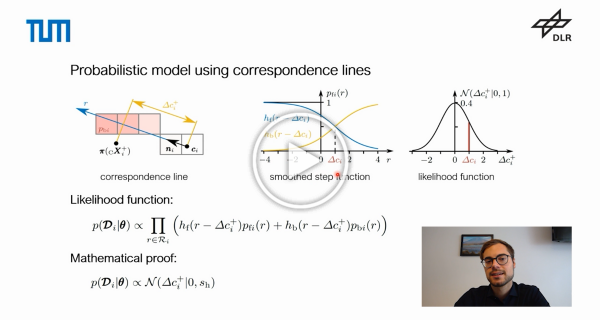
Fusion de l'apparence visuelle et de la géométrie pour le suivi d'objets 6DoF multimodalités
Présentation CVPR 2022

Géométrie correspondante itérative
Présentation orale ACCV 2020
Une approche gaussienne clairsemée du suivi d'objets 6DoF basé sur la région
Une approche gaussienne clairsemée du suivi d'objets 6DoF basé sur la région


