RVB D Fusion
v1.0.1
Auteurs :
Sascha Kirch, Valeria Olyunina, Jan Ondřej, Rafael Pagés, Sergio Martín et Clara Pérez-Molina
[ Paper ] [ BibTex ]
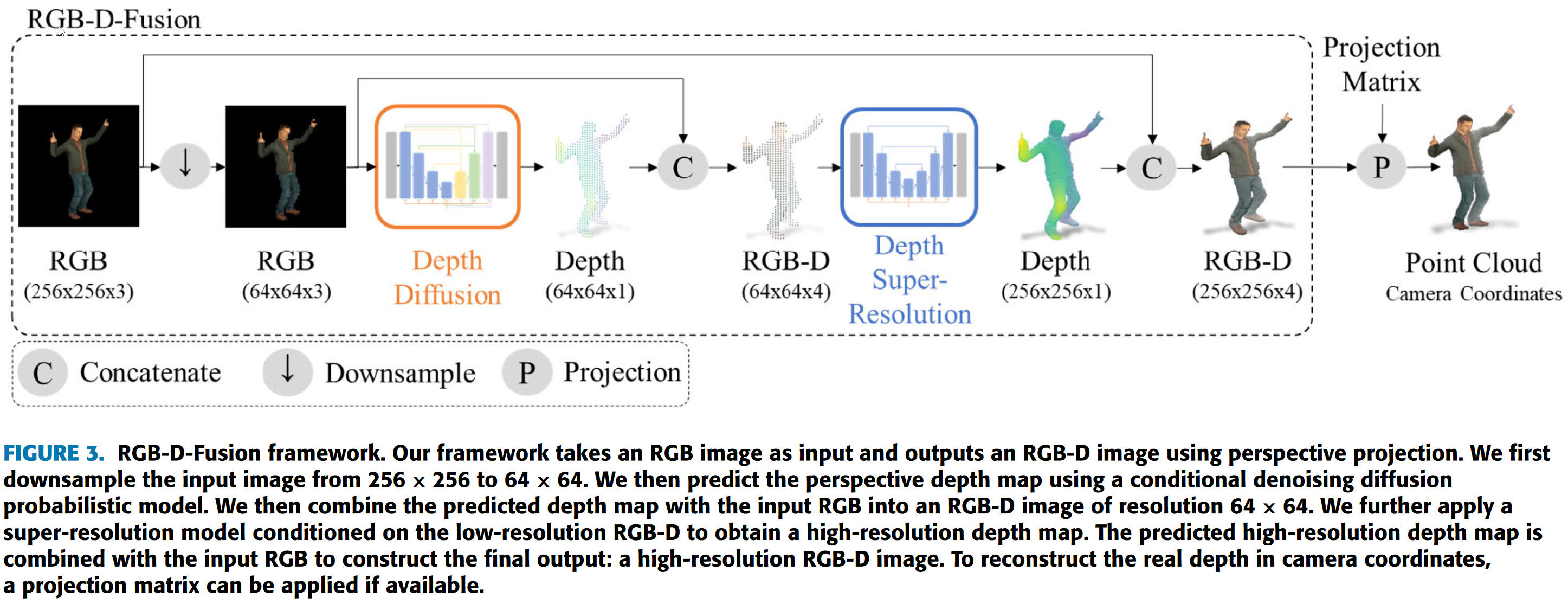
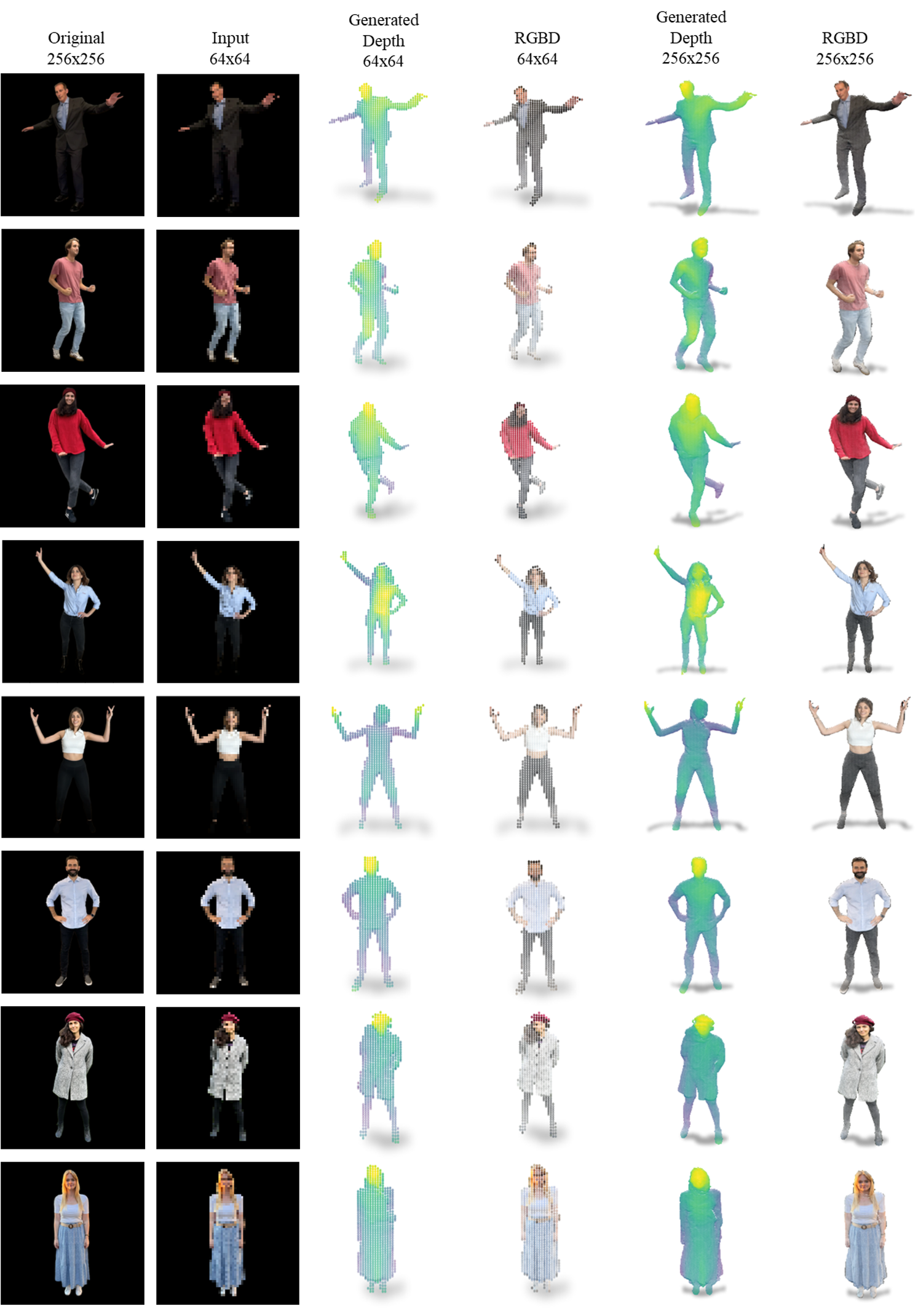
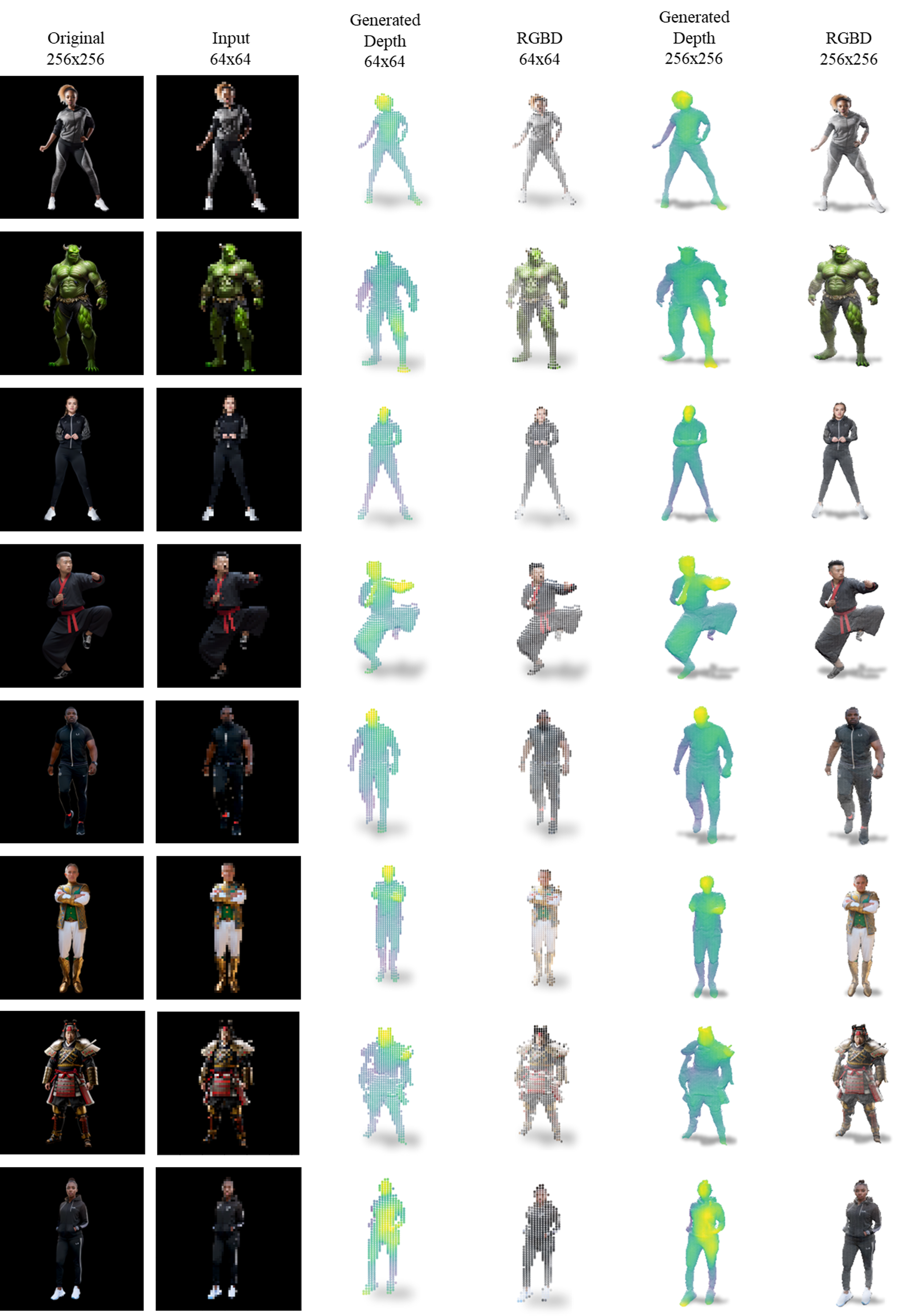
Implémentation de TensorFlow pour RGB-D-Fusion. Pour plus de détails, consultez l'article RGB-D-Fusion: Image Conditioned Depth Diffusion of Humanoid Subjects .
2023/10/14 : Le code est disponible maintenant !2023/09/04 : Notre article est désormais publié dans IEEE Access !2023/07/29 : Nous publions notre pré-print sur arxiv. 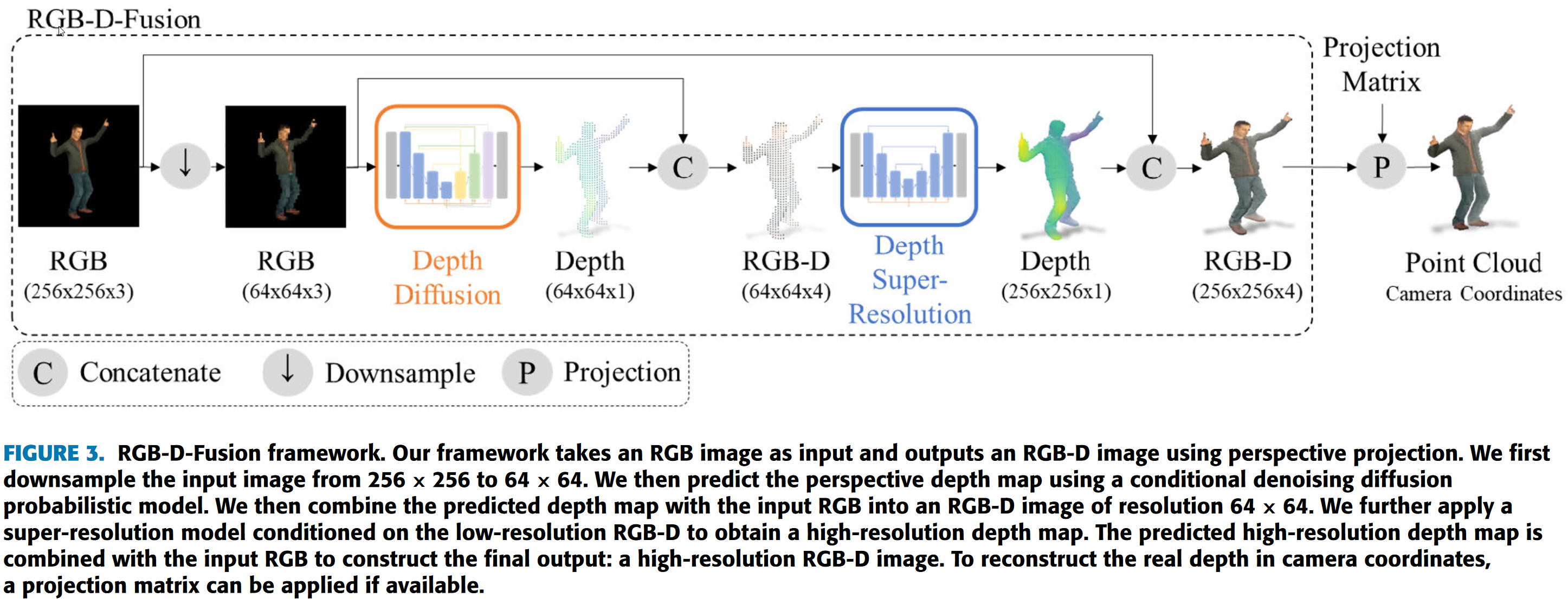
 |  |  |
Nous vous recommandons d'utiliser un environnement Docker. Nous fournissons un fichier docker de TensorFlow et un fichier docker de nvidia. Ce dernier est plus grand mais inclut les optimisations de performances de nvidia. Assurez-vous que Docker est installé, y compris l'extension GPU de nvidia.
docker build -t < IMAGE_NAME > / < VERSION > -f < PATH_TO_DOCKERFILE >docker container create --gpus all -u 1000:1000 --name rgb-d-fusion -p 8888:8888 -v < PATH_TO_tf_DIR > :/tf -v < PATH_TO_YOUR_GIT_DIR > :/tf/GitHub -it < IMAGE_NAME > / < VERSION >docker start rgb-d-fusionLa hiérarchie des répertoires devrait ressembler à ceci
|- tf
|- manual_datasets
|-
|- test
|- DEPTH_RENDER_EXR
|- MASK
|- PARAM
|- RENDER
|- train # same hierachy as in test
|- # same hierachy as inv_humas_rendered
|- GitHub
|- ConditionalDepthDiffusion # This Repo
|- output_runs # Auto generated directory to store results
|- DepthDiffusion
|- checkpoints # stores saved model checkpoints
|- illustrations # illustrations that are beeing generated during or after training
|- diffusion_output # used for inference to store data sampled from the model
|- SuperResolution # same hierachy as in DepthDiffusion
La hiérarchie peut être créée à un seul endroit ou dans différents répertoires. Lors du démarrage du conteneur Docker, différents répertoires peuvent être montés ensemble.
Les scripts se trouvent sous scripts. Il existe actuellement deux types de modèles :
Chaque modèle possède ses scripts de formation, d'évaluation et d'inférence dédiés écrits en python. Vous pouvez vérifier la fonctionnalité et les paramètres via python