botsim
first official release

BotSIM est une boîte à outils open source de simulation de robots pour l'évaluation, le diagnostic et la correction de bout en bout à grande échelle et efficaces en matière de données, des systèmes de dialogue commerciaux orientés tâches (chatbots) sur plusieurs plates-formes de robots. Cette boîte à outils vise à fournir aux développeurs et praticiens de robots une solution unique pour accélérer le développement et l’évaluation des robots, réduire les coûts et les délais de mise sur le marché. En tant que cadre modulaire, BotSIM peut être étendu par les développeurs de robots pour prendre en charge de nouvelles plates-formes de robots. En tant que boîte à outils, BotSIM propose une application facile à utiliser et une suite d'outils de ligne de commande permettant aux praticiens des robots d'appliquer facilement le pipeline « génération-simulation-remédiation » de BotSIM.
Les principales fonctionnalités de BotSIM incluent :
Pour utiliser BotSIM, les utilisateurs doivent avoir un accès API aux plates-formes de robots prises en charge suivantes :
org ID , button ID , deployment Id , chat endpointlocation ID , project ID , agent ID et jeton API JSON conda create -n botsim python=3.9
conda activate botsim git clone https://github.com/salesforce/botsim.git
cd botsim
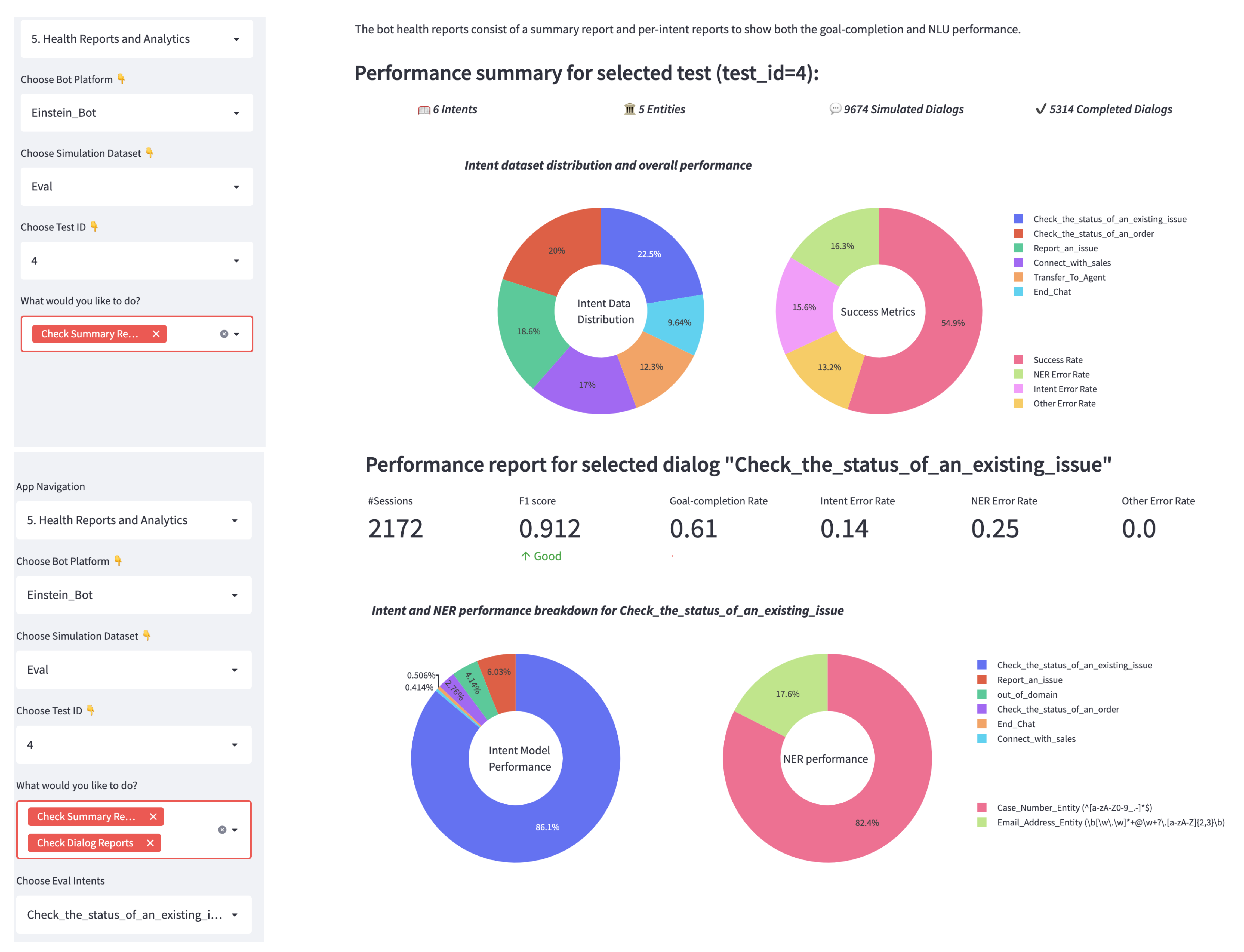
pip install -r requirements.txtLe moyen le plus simple de démarrer avec BotSIM est l’application Web Streamlit. L'application multipage est développée pour guider les utilisateurs dans l'exploitation du pipeline « génération-simulation-remédiation » de BotSIM pour l'évaluation, le diagnostic et la correction de leurs robots.
Les commandes suivantes peuvent être utilisées pour démarrer l'application Web Streamlit localement :
export PYTHONPATH=./: $PYTHONPATH
export DATABASE_URL= " db/botsim_sqlite_demo.db "
streamlit run botsim/streamlit_app/app.pyL'application peut également être déployée sur GCP pour accéder aux ressources GPU. Des instructions de déploiement détaillées sont données dans la section Déploiement GCP de la documentation.
Alternativement, les utilisateurs peuvent également approfondir leurs connaissances pour en savoir plus sur les composants du système BotSIM via les outils de ligne de commande. Les détails sont donnés dans la section tutoriel de la documentation du code.
Nous fournissons les didacticiels suivants dans la documentation du code.
Pour plus de détails sur les composants du système et les utilisations avancées, veuillez vous référer à la documentation du code. Nous saluons la contribution de la communauté open source pour améliorer BotSIM. Pour prendre en charge les nouvelles plates-formes de robots, veuillez également suivre les instructions détaillées dans la documentation du code.
Une démonstration du tableau de bord de l'application Streamlit est accessible ici. Vous pouvez trouver plus de détails sur les conceptions BotSIM dans notre rapport technique :
@article{guangsen2022-botsim-tr,
author = {Guangsen Wang and Junnan Li and Shafiq Joty and Steven Hoi},
title = {BotSIM: An End-to-End Bot Simulation Toolkit for Commercial Task-Oriented Dialog Systems},
year = {2022},
url = {https://arxiv.org/abs/2211.15916},
archivePrefix = {arXiv},
}
Les descriptions détaillées du système sont présentées dans le document de démonstration du système EMNLP 2022 suivant :
@article{guangsen2022-botsim-demo,
author = {Guangsen Wang and Samson Tan and Shafqi Joty and Gang Wu and Jimmy Au and Steven Hoi},
title = {BotSIM: An End-to-End Bot Simulation Framework for Commercial Task-Oriented Dialog Systems},
year = {2022},
url = {https://arxiv.org/abs/2211.11982},
archivePrefix = {arXiv},
}
Si vous utilisez BotSIM dans vos recherches ou applications, veuillez citer les articles.
N'hésitez pas à contacter [email protected] pour tout commentaire, problème ou suggestion.
Licence BSD à 3 clauses


