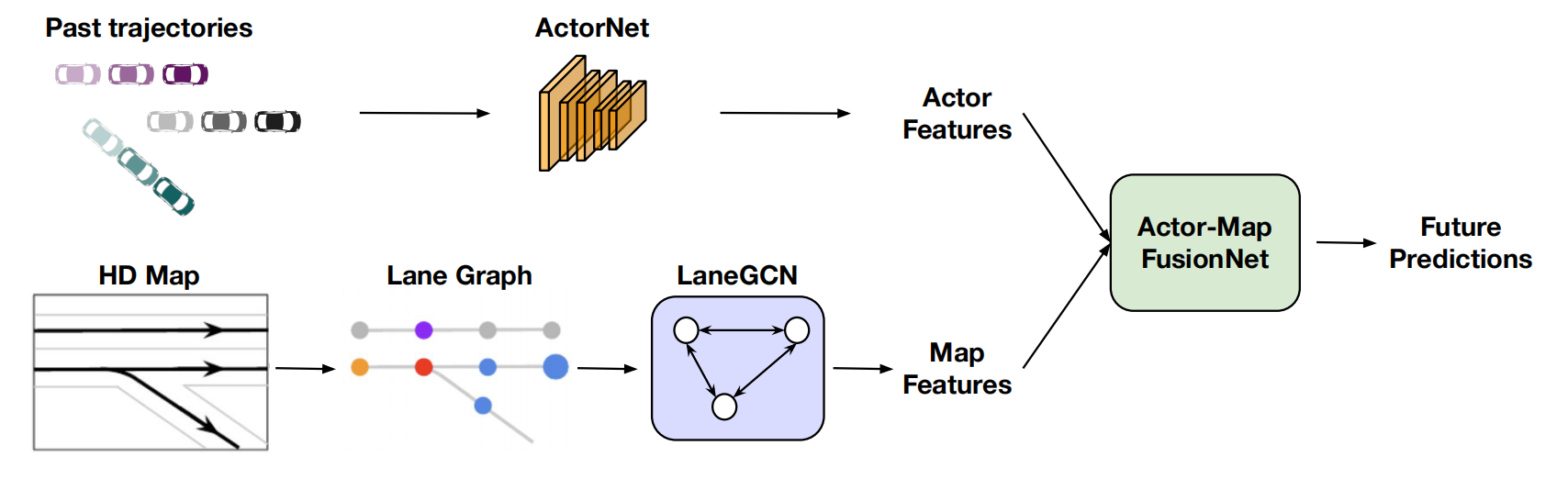
LaneGCN
1.0.0
Prudence
Le compartiment Amazon AWS S3 argoai-argoverse qui contient de nombreux fichiers de démonstration a été compromis. Les fichiers peuvent être corrompus.
Les fichiers faisant référence à ce compartiment S3 ont été modifiés et toutes les extractions de ce compartiment sont commentées. Veuillez procéder avec prudence.
Papier | Diapositives | Page du projet | Vidéo orale ECCV 2020
Ming Liang, Bin Yang, Rui Hu, Yun Chen, Renjie Liao, Song Feng, Raquel Urtasun
Classé 1er au concours de prévision de mouvement Argoverse
Vous devez installer les packages suivants pour exécuter le code :
conda create --name lanegcn python=3.7
conda activate lanegcn
conda install pytorch==1.5.1 torchvision cudatoolkit=10.2 -c pytorch # pytorch=1.5.1 when the code is release
# install argoverse api
pip install git+https://github.com/argoai/argoverse-api.git
# install others dependancy
pip install scikit-image IPython tqdm ipdbmpi4py pour une formation distribuée. Horovod est plus efficace que nn.DataParallel pour la formation multi-gpu et plus facile à utiliser que nn.DistributedDataParallel . Avant d'installer horovod, assurez-vous que openmpi est installé ( sudo apt-get install -y openmpi-bin ). pip install mpi4py
# install horovod with GPU support, this may take a while
HOROVOD_GPU_OPERATIONS=NCCL pip install horovod==0.19.4
# if you have only SINGLE GPU, install for code-compatibility
pip install horovodsi vous avez des problèmes concernant horovod, veuillez vous référer à horovod github
Vous pouvez vérifier les scripts et télécharger les données traitées au lieu de les exécuter pendant des heures.
bash get_data.sh # single node with 4 gpus
horovodrun -np 4 -H localhost:4 python /path/to/train.py -m lanegcn
# 2 nodes, each with 4 gpus
horovodrun -np 8 -H serverA:4,serverB:4 python /path/to/train.py -m lanegcnIl faut 8 heures pour entraîner le modèle en 4 GPUS (RTX 5000) avec horovod.
Nous fournissons également un journal de formation pour que vous puissiez déboguer.
python train.py -m lanegcnVous pouvez télécharger le modèle pré-entraîné à partir d'ici
python test.py -m lanegcn --weight=/absolute/path/to/36.000.ckpt --split=test
python test.py -m lanegcn --weight=36.000.ckpt --split=val
Résultats qualitatifs
Étiquettes (rouge) Prédiction (vert) Autres agents (bleu)
Résultats quantitatifs 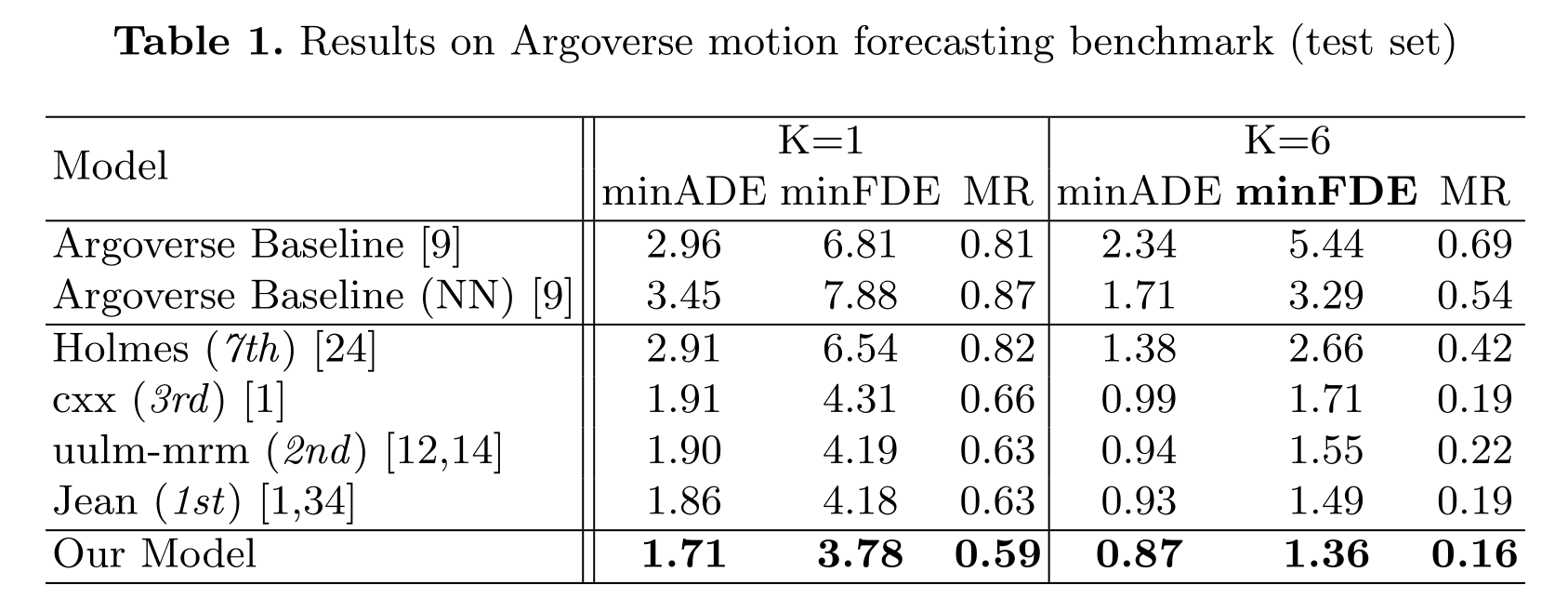
vérifier LICENCE
Si vous utilisez notre code source, pensez à citer ce qui suit :
@InProceedings { liang2020learning ,
title = { Learning lane graph representations for motion forecasting } ,
author = { Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel } ,
booktitle = { ECCV } ,
year = { 2020 }
}Si vous avez des questions concernant le code, veuillez ouvrir un problème et @chenyuntc.


