Event Beacon Communication
1.0.0
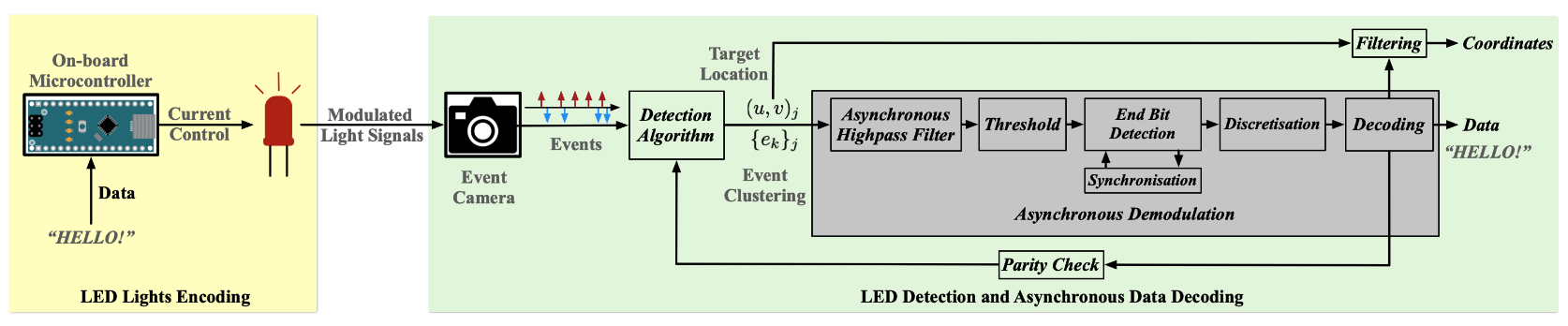
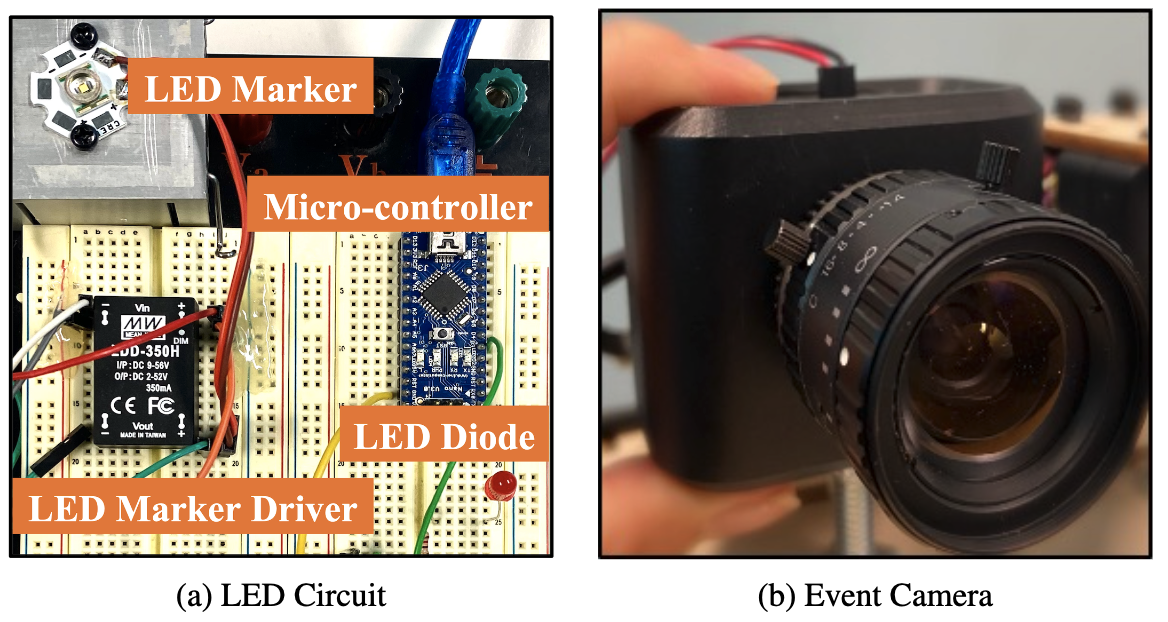
Les caméras d'événements sont des capteurs de vision dynamique bio-inspirés qui répondent aux changements d'intensité de l'image avec une résolution temporelle élevée, une plage dynamique élevée et une faible latence. Ces caractéristiques de capteurs sont parfaitement adaptées pour permettre le suivi cible visuel de concert avec un canal de communication visuelle diffusée pour les balises visuelles intelligentes avec des applications en robotique distribuée. Les balises visuelles peuvent être construites par modulation à haute fréquence des diodes émettrices de lumière (LED) telles que les phares de véhicules, l'Internet des objets (IoT), les lumières de construction intelligentes, etc., qui sont déjà présentes dans de nombreux scénarios du monde réel. La caractéristique de résolution temporelle élevée des caméras d'événements leur permet de capturer des signaux visuels à des débits de données beaucoup plus élevés par rapport aux caméras classiques basées sur des cadres. Dans cet article, nous proposons une nouvelle architecture de balise visuelle intelligente avec des algorithmes de démodulation de caméra LED et de caméra d'événement. Nous évaluons quantitativement la relation entre le taux de transmission LED, la distance de communication et la précision de transmission des messages pour le système de communication Smart Visual Beacon que nous avons prototypé. La méthode proposée atteint jusqu'à 4 kbps dans un environnement intérieur et une transmission sans perte sur une distance de 100 mètres, à un taux de transmission de 500 bps, en plein soleil, démontrant le potentiel de la technologie dans un environnement extérieur.
Ziwei Wang, Yonhon NG, Jack Henderson et Robert Mahony
Le document a été accepté par la Conférence internationale de l'IEEE sur les robots et systèmes intelligents (IROS 2022) à Kyoto, au Japon.
[Document de conférence] [ARXIV Préimpression]
Si vous utilisez ou discutez de notre algorithme ou de nos ensembles de données, veuillez citer notre article comme suit:
@Inproceedings {wang22iros,
auteur = {Ziwei Wang et Yonhon Ng et Jack Henderson et Robert Mahony},
title = {Balises visuelles intelligentes avec des communications optiques asynchrones à l'aide de caméras d'événements},
booktitle = {"Conférence internationale sur les robots et systèmes intelligents (Iros 2022)"},
année = {2022}
}
Exécutez decoder.m , il chargera les données de l'événement de ./data. Le décoder de décodeur de decoder.m sort le message décodé et le taux de précision (taux de précision du message et taux de précision du bit).
Si vous avez des questions ou des suggestions, n'hésitez pas à entrer en contact avec [email protected]


