SquawkersMcGraw
1.0.0
Ingénierie inverse et remixant le Hasbro Furreal Friend "Squawkers McGraw" Animatronic Parrot 
 | 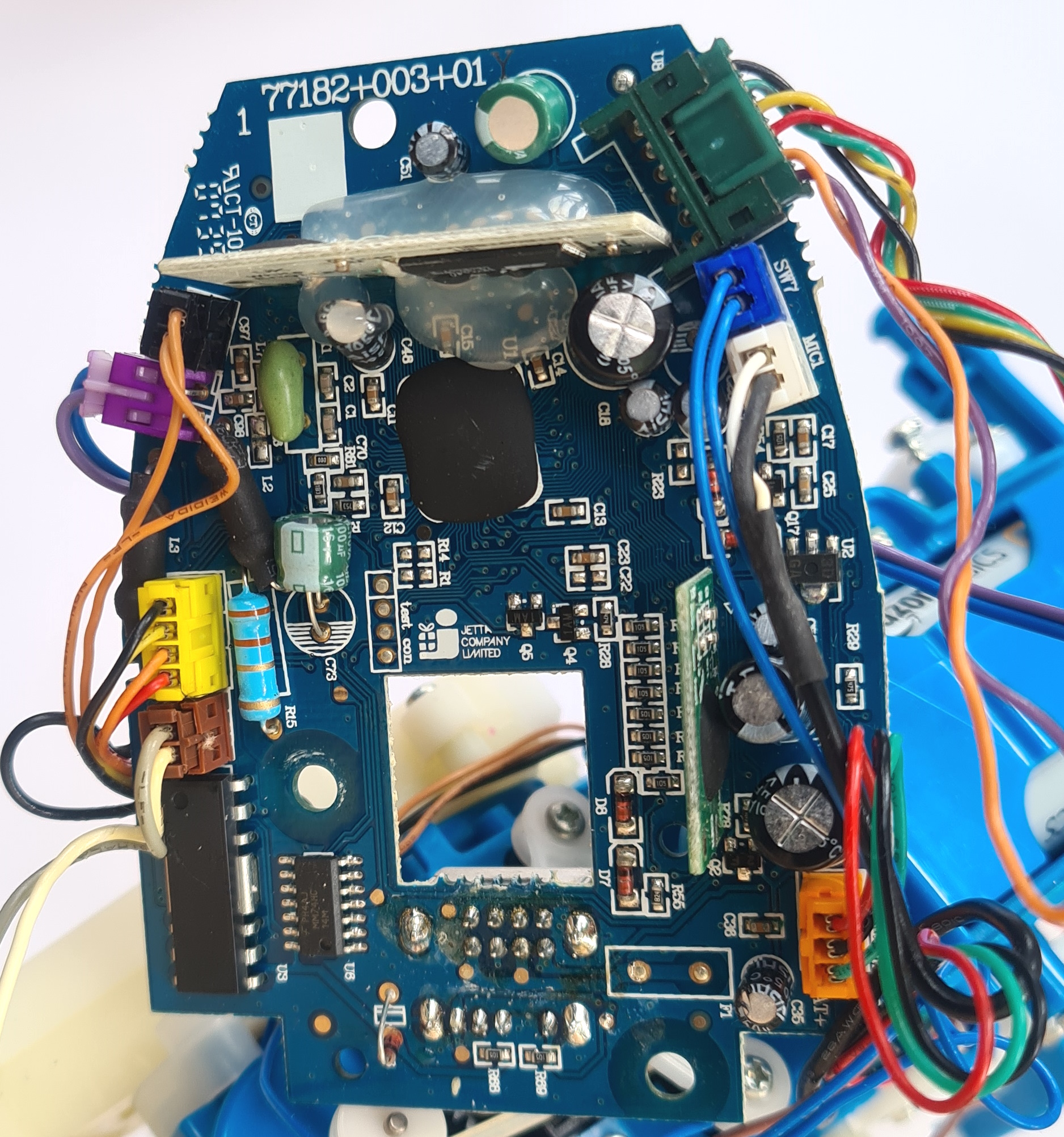 | 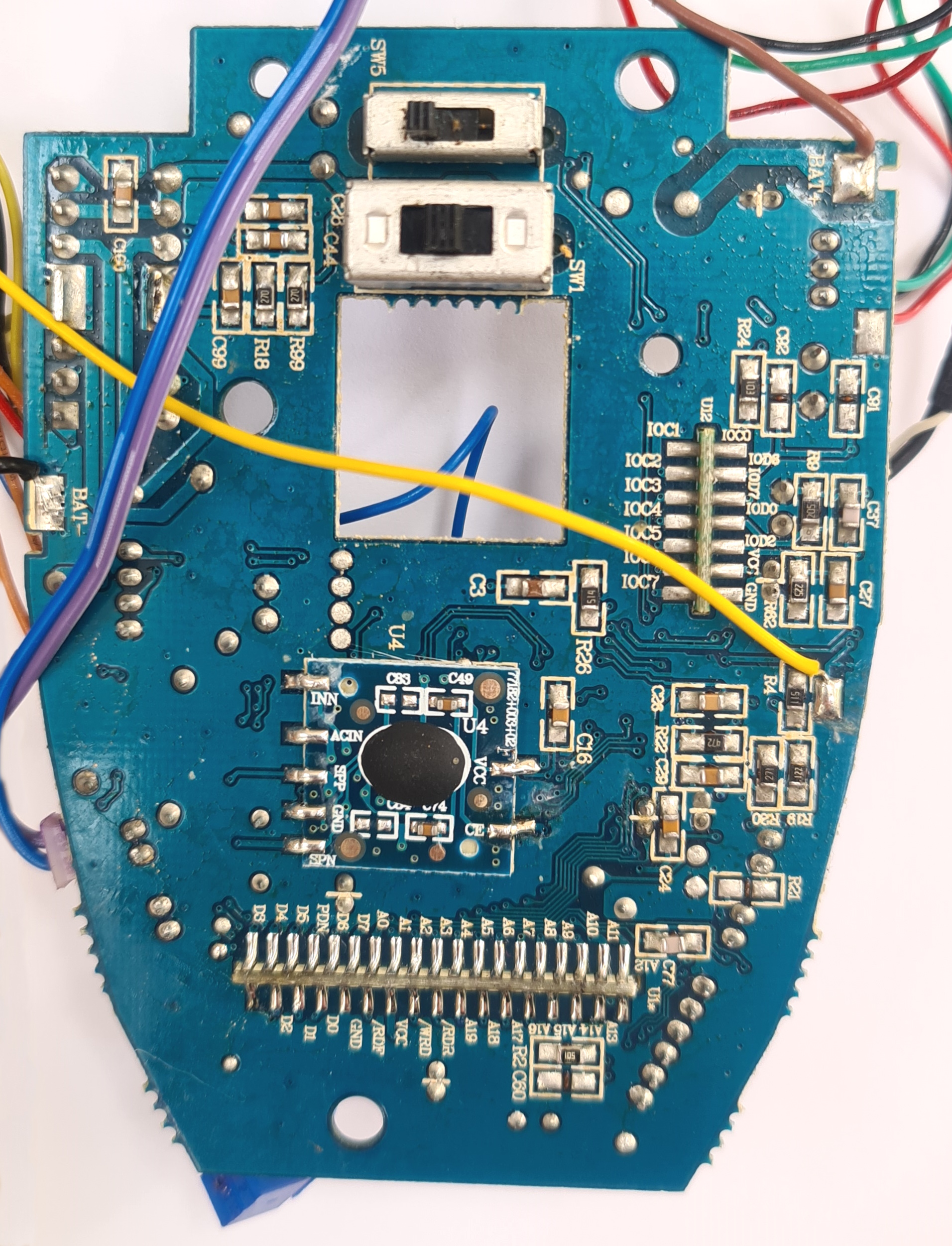 |
Il existe une variété de commutateurs et d'entrées de capteurs, comme suit:
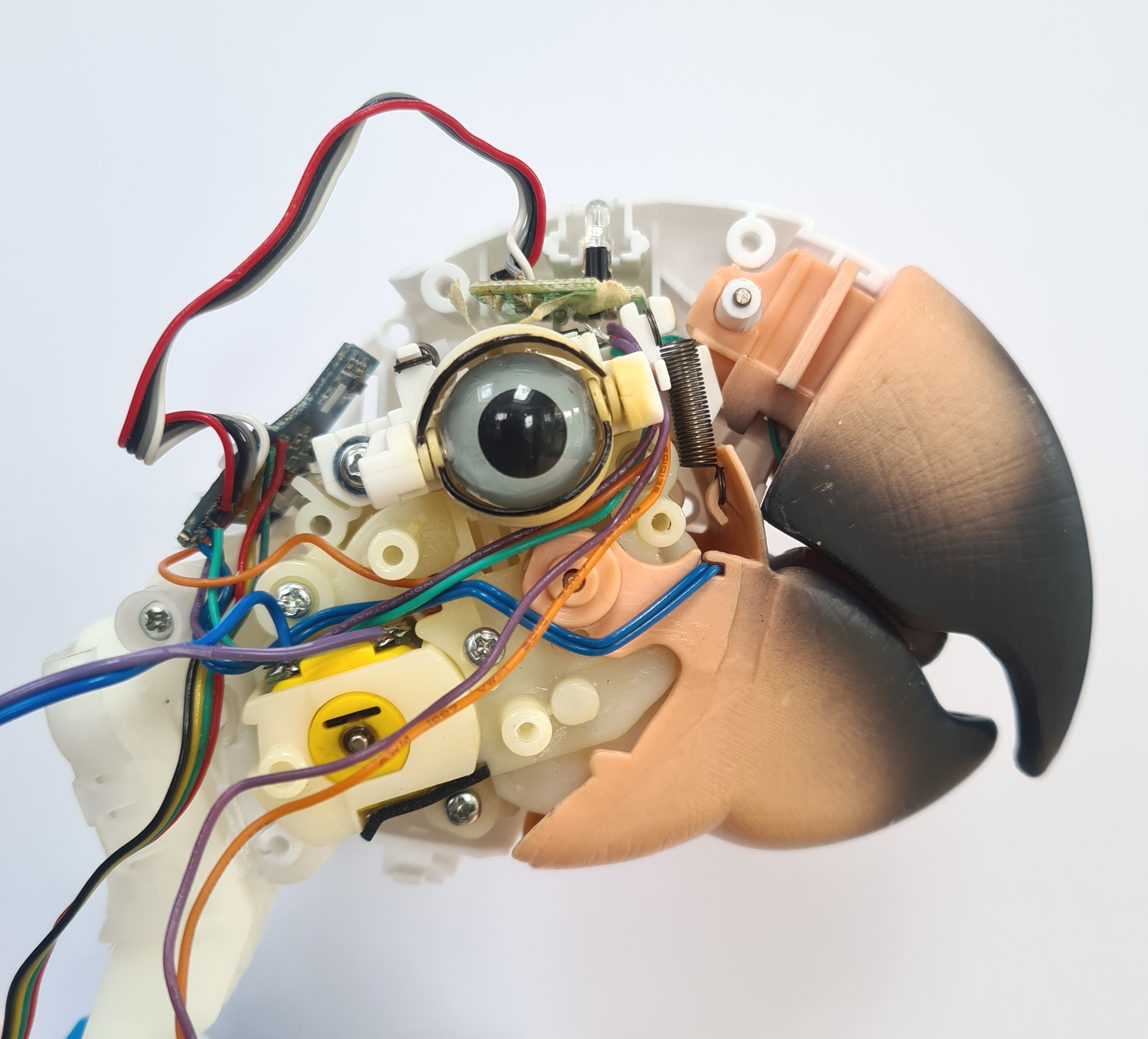
Tous les mouvements sont contrôlés via deux moteurs de passe-temps DC. En utilisant un système de came intelligent, inverser la direction des moteurs peut déclencher différents actionneurs.

Le contrôleur a un commutateur à trois positions, trois boutons de mode de lecture, 6 boutons de programme et un bouton d'enregistrement personnalisé. Il semble diffuser des chaînes de commandes en utilisant la fréquence de porteuse commune de 38 kHz. Pour une méthode non destructive pour contrôler Squawkers McGraw, vous pouvez simplement transmettre ces mêmes codes de commande pour déclencher l'un des comportements intégrés.
Les chaînes de commande suivantes ont été saisies à l'aide d'un code d'Arduino et du code d'analyseur de signaux infrarouges décrit sur https://www.patreon.com/posts/infrared-puzzle-28343366
// Repeat Button
unsigned int repeatData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1100,2000,2000,1000,1000,2000,2000,1000,1100,2000,2000,1000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
// Custom Record [same as Response]
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,2000,1000,1100,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
Pour personnaliser complètement le comportement du perroquet, il faut une modification plus destructrice - brisant les connexions à la carte de commande et en câbler les entrées et sorties à un processeur tel qu'un Arduino, comme suit:
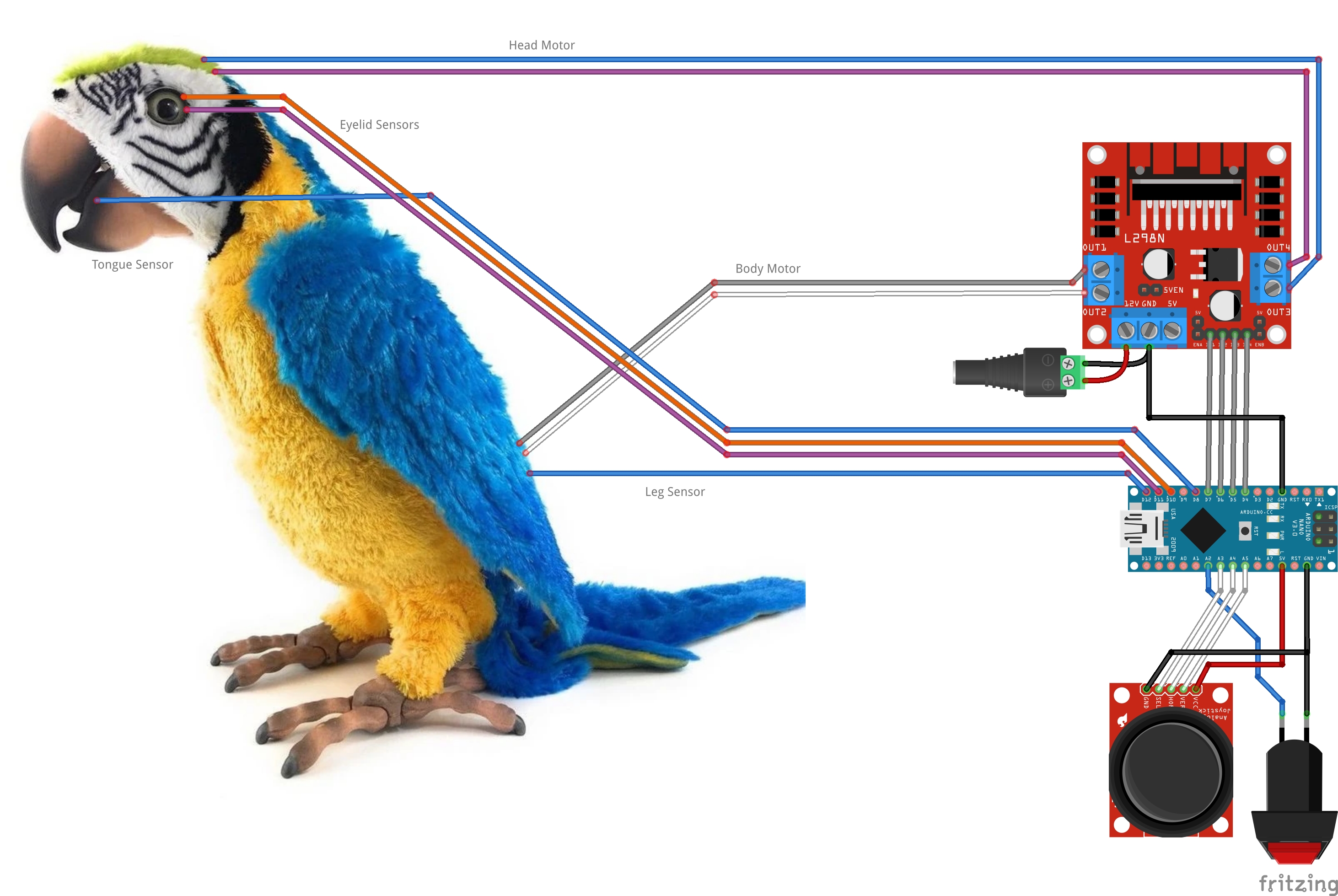
Notez que chacun des capteurs illustrés se compose en fait d'une paire de fils - un signal d'entrée et un fil de terre (avec le contrôleur ayant une entrée de bord pour le moment où les entrées ne sont pas déclenchées). Le code utilisé pour contrôler un tel contrôleur modifié est démontré dans un croquis Arduino .ino dans ce référentiel.


