このリポジトリには、論文のソース コードが含まれています。
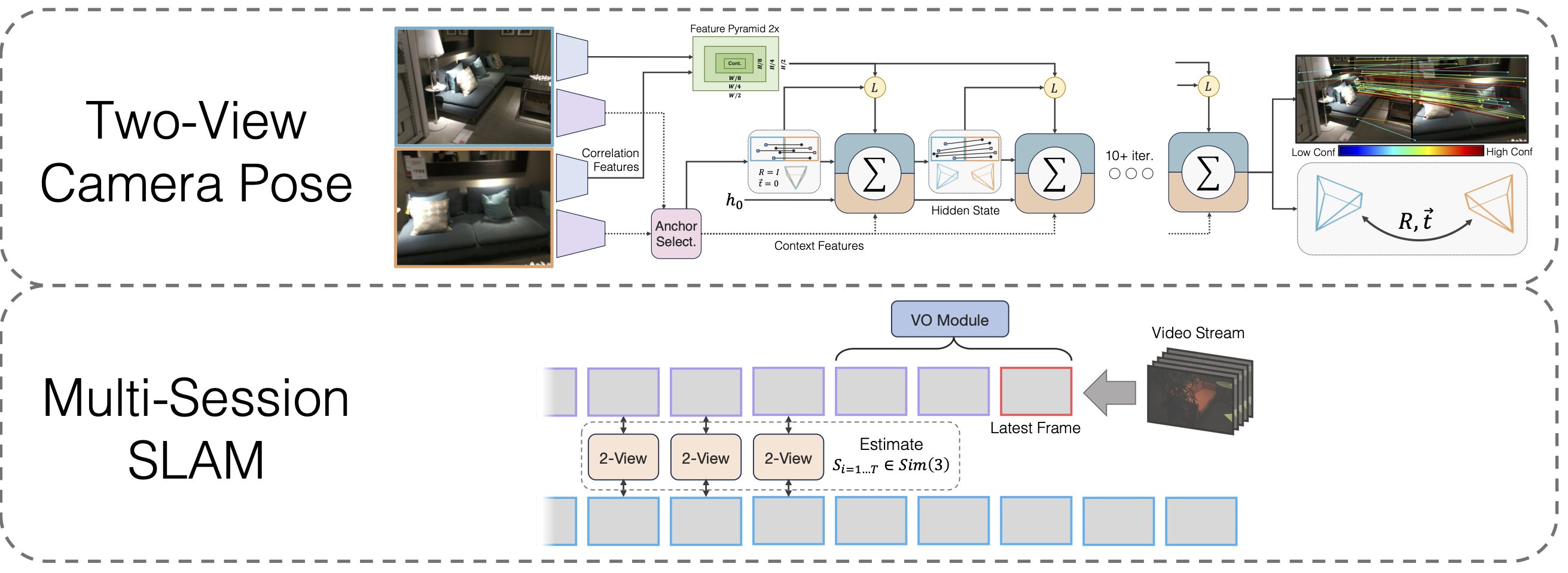
微分可能なワイドベースラインポーズ最適化を備えたマルチセッション SLAM
ラハヴ・リプソン、ジア・デン
@inproceedings{lipson2024multi,
title={Multi-Session SLAM with Differentiable Wide-Baseline Pose Optimization},
author={Lipson, Lahav and Deng, Jia},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
year={2024}
}
git clone --recursive [email protected]:princeton-vl/MultiSlam_DiffPose.git cd MultiSlam_DiffPose conda env create --file environment.yml --name msdp conda activate msdp
サードパーティのライブラリhlocもインストールする必要があります。
cd サードパーティ/階層ローカリゼーション python -m pip install -e .cd ../..
そしてエイゲン
wget https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip unzip eigen-3.4.0.zip -d thirdparty
最後に、実行します
pip インストール 。
モデルの重みをダウンロードする
VO バックボーン、2 ビュー バックボーン、およびホモグラフィーの事前トレーニング後の 2 ビュー バックボーンのモデルの重みを提供します。
https://drive.google.com/drive/folders/11iC4ZAmO_mWMUjkpS83HgVcS80hFL-30?usp=sharing
まだ実行していない場合は、 conda install jupyter実行します。
2 つのビューのポーズ方法をデモするためのノートブックを提供します。関数run_model(model, images, intrinsics)ポーズ/一致の中間予測のリストを出力します。最後の (最良の) 予測は次の形式になります。
Scannet / mega Depth で予測を視覚化するには、2 つのビューのデータのダウンロード手順に従って、実行します。
jupyter notebook demo_scannet_megadepth.ipynb
任意の画像ペアの予測を視覚化するには、 demo_pair.ipynbを編集して実行します。
jupyterノートブックdemo_pair.ipynb
2 つのビュー
LoFTR の作成者は、Scannet と Mega Depth のテスト セットを惜しみなく提供しています。これらをそれぞれdata/scannet/scannet_test_1500/およびdata/megadepth/megadepth_test_1500/にダウンロードして解凍します。
untar mega Depth_test_1500.tar -C data/mega Depth/ untar scannet_test_1500.tar -C data/scannet/
マルチセッションSLAM
EuRoC : ここで EuRoC データセットからシーケンスをダウンロードします。必ず ASL 形式をダウンロードしてください。 data/EuRoCの下のシーケンスを解凍します。
ETH3D : 提供されたスクリプト download_eth3d_slam_datasets.py を使用して、ETH3D トレーニング データセットからシーケンスをダウンロードできます。モノラル、RGBのみ選択可能です。 data/ETH3Dの下のシーケンスを解凍します。
マルチセッションSLAM
すべての EuRoC シーケンス グループに対する完全なマルチセッション SLAM アプローチを評価するには、次を実行します。
python eval_euroc.py 'Vicon 1'python eval_euroc.py 'Vicon 2'python eval_euroc.py 'Machine Hall'python eval_euroc.py 'Machine Hall0-3'
ETH3D シーケンス グループでメソッドを評価するには、次を実行します。
python eval_eth3d.py ソファ python eval_eth3d.py テーブル Python eval_eth3d.py plant_scene Python eval_eth3d.py アインシュタイン Python eval_eth3d.py 平面
どちらのスクリプトも同じテンプレートに従います。パイプラインを新しいデータに拡張するには、イメージと組み込み関数をロードするためのデータローダーを実装するだけで済みます。
2視点ポーズ
Scannet で 2 ビュー ポーズ法を評価するには、次のコマンドを実行します。
pythonestimate.py --dataset test_scannet --load_ckpt twoview.pth -o ScanNetDatasetWrapper.pad_to_size=840
Mega Depth の場合は、次を実行します。
pythonevaluate.py --dataset test_mega Depth --load_ckpt twoview.pth
データダウンロード
合成ホモグラフィー: https://github.com/filipradenovic/revisitop でダウンロード スクリプトを実行して、Oxford-Paris ディストラクター データセットをダウンロードします。ファイルをdata/revisitop1m/jpg/に保存します。
Scannet/Mega Depth : LoFTR トレーニング データのセットアップの指示に従います: https://github.com/zju3dv/LoFTR/blob/master/docs/TRAINING.md。 *_indices.tar indexサブフォルダーに解凍します。
VO データのダウンロード: VO バックボーンをトレーニングするためのデータをダウンロードするには、DROID-SLAM リポジトリからのダウンロード手順に従います。
完全なデータ レイアウトは次のようになります。
§── データ
§── revisitop1m
§── jpg
§── revisitop1m.txt
§── スカンネット
§── インデックス
§── scannet_test_1500
§── 電車
§── メガデプス
§── インデックス
§── scannet_test_1500
§── 電車
§── タータンエアー
§── 廃工場
§── ...ホモグラフィー 2 ビュー事前トレーニング
1 つまたは複数の A6000 (ここでは 1 つを使用) で、次のコマンドを実行します。
python train.py -g train_homog.gin --batch_size 14 --name homog_pretrain mv model_weights/homog_pretrain/step_140000.pth homog_pretrain.pth
2 ビューの完全なトレーニング
1 台または複数の A6000 (ここでは 10 台を使用) で、次のコマンドを実行します。
python train.py -g train_pose.gin --batch_size 12 --name twoview --load_ckpt homog_pretrain.pth mv model_weights/twoview/step_100000.pth twoview.pth
VOトレーニング
1 つまたは複数の A6000 (ここでは 1 つを使用) で、次のコマンドを実行します。
python train_vo.py --steps=240000 --lr=0.00008 --name=vo mv チェックポイント/vo_240000.pth vo.pth
このプロジェクトは、既存のリポジトリのコードに依存しています。
階層的ローカリゼーション
LoFTR
DPVO
ピトーチ3D
コードをオープンソースにしてくれた作者に感謝します


