Navigating Ryze Tello Drones With MATLAB App
v1.1.1
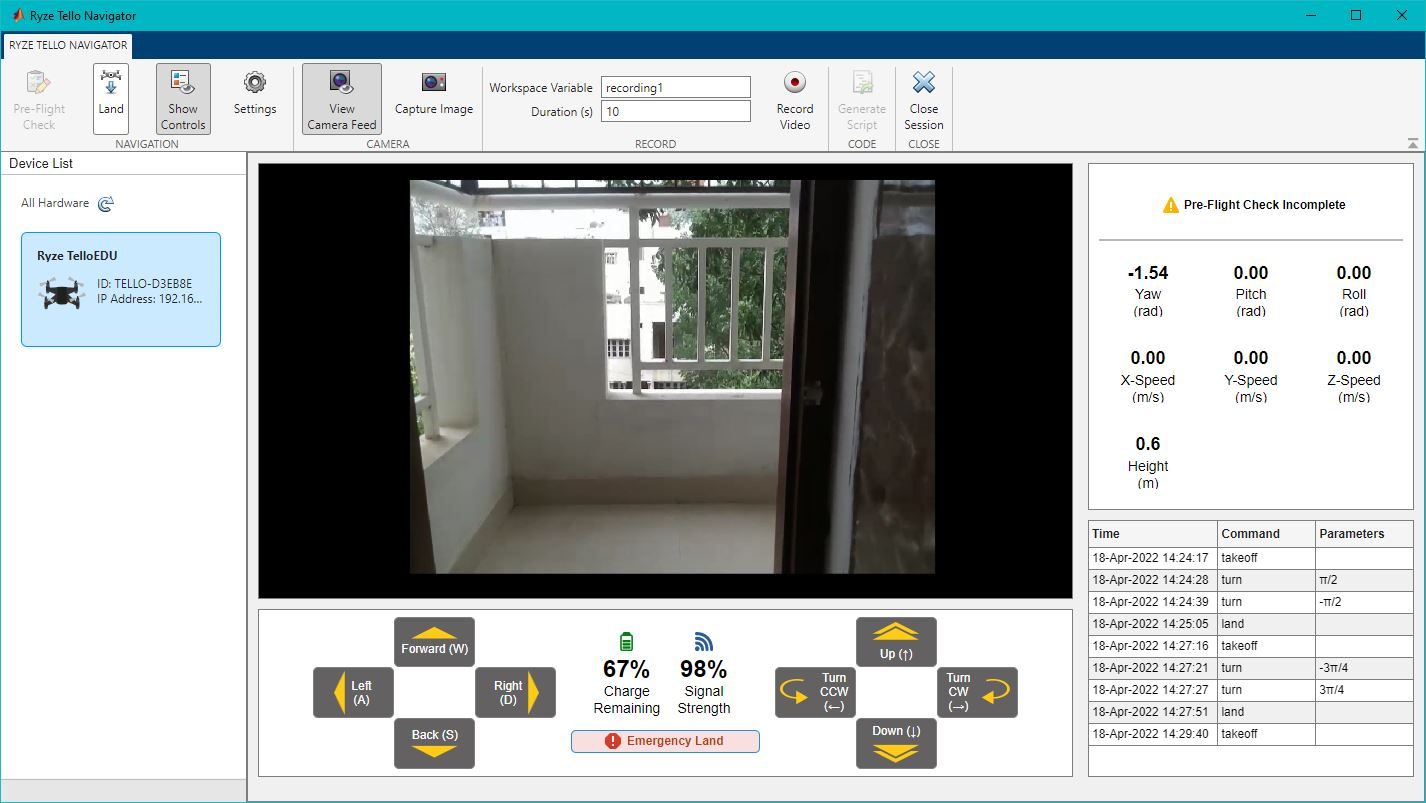
MATLAB® を実行しているコンピューターに接続された Ryze® Tello Drone を対話的に制御するために、MathWorks® は MATLAB アプリである Ryze Tello Navigator を提供しています。このアプリは次のことに役立ちます。
コンピューターの WiFi ネットワークに接続されているすべての Ryze Tello ドローンを表示します。
ドローンの離陸・着陸を行います。
キーボードを使用するか、アプリのナビゲーション制御ボタンを使用して、ドローンのナビゲーションを制御します。
カメラ フィードをプレビューして画像をキャプチャします。
ドローンのビデオ フィードを MATLAB ワークスペース変数に記録します。
完成したナビゲーション用の MATLAB スクリプトを生成します。
Ryze Tello ドローン用の MATLAB および MATLAB サポート パッケージをインストールする
初期セットアップと構成を実行し、1 つ以上の Ryze Tello ドローンに接続します。
このリポジトリをダウンロードまたは複製します。
MATLAB のローカル リポジトリ フォルダーに移動します。
MATLAB コマンド ウィンドウで次のコマンドを実行します。
追加パス(pwd);
保存パス;
ryzeTelloNavigatorコマンドを実行してアプリを起動します。
MATLAB リリース R2022a 以降が必要
Ryze Tello® ドローン用の MATLAB® サポート パッケージ
デバイスリストに表示されるドローンが、アプリを使用して制御したいドローンであることを確認してください。ドローンがリストにない場合は、セットアップと構成を再度実行してください。
| ステップ | アクション | 結果 |
|---|---|---|
| 1 |  デバイスリストからドローンの名前をクリックし、上部のナビゲーションセクションで飛行前チェックをクリックします。 デバイスリストからドローンの名前をクリックし、上部のナビゲーションセクションで飛行前チェックをクリックします。 | 新しいダイアログ ボックス [実行前チェックリスト] が表示されます。飛行前チェックの進行中は、アプリ内の他のすべてのコントロールが無効になります。エラーがある場合は、ダイアログ ボックスに必要なトラブルシューティング手順へのリンクが表示されます。 |
| 2 | すべての飛行前チェックが正常に完了したことを確認したら、「OK」をクリックします。 |  アプリの右側に「飛行前チェックが完了しました」という表示が表示されます。他のすべてのコントロールも有効になります。 アプリの右側に「飛行前チェックが完了しました」という表示が表示されます。他のすべてのコントロールも有効になります。 |
Ryze Tello Navigator は、Ryze Tello ドローンの離陸/着陸を実行し、インタラクティブに制御するのに役立ちます。
注: ドローンの離陸を開始する前に、一般的な安全上の注意事項を考慮してください。離陸中または手動ナビゲーション制御の実行中(以降の手順で説明します)にドローンとその周囲に発生する可能性のある損傷を感知した場合は、 [緊急着陸]をクリックできます。このボタンをクリックすると、ドローンのモーターが緊急停止し、現在の高さから地面に落下するか (Tello EDU ドローンの場合)、ドローンが現在の位置から強制的に垂直に着陸します (Tello ドローンの場合)。
| ステップ | アクション | 結果 |
|---|---|---|
| 1 |  アプリに表示されるドローンのバッテリー充電量と信号強度が、離陸と制御を実行するのに十分であることを確認します。 アプリに表示されるドローンのバッテリー充電量と信号強度が、離陸と制御を実行するのに十分であることを確認します。 | |
| 2 |  [カメラ フィードの表示] をクリックして、ドローンからのカメラ フィードが適切に動作していることを確認します。 [カメラ フィードの表示] をクリックして、ドローンからのカメラ フィードが適切に動作していることを確認します。 | アプリには、離陸前にドローンのカメラで撮影されたプレビューが表示されます。その後、ドローンが移動すると、カメラからのライブ フィードでプレビューが更新されます。 |
| 3 |  キーボードのスペースバーを押すか、ツールストリップ領域のナビゲーションセクションに表示される[テイクオフ]をクリックします。 キーボードのスペースバーを押すか、ツールストリップ領域のナビゲーションセクションに表示される[テイクオフ]をクリックします。 | ドローンのモーターが始動し、ドローンは特定の高度まで離陸し、その位置でホバリングします。 Take OffボタンはLandボタンに置き換えられます。 |
| 4 | アプリ内の各アイコンをクリックするか、キーボードを使用して、アプリからドローンの手動ナビゲーションを実行します。 | ドローンは、トリガーしたナビゲーション コントロールに従って移動します。カメラ フィード (プレビュー) が有効になっている場合は、それも更新されます。アプリに表示されるプレビュー ウィンドウの領域を増やすには、手動制御用のボタンを表示するペインを非表示にします。 「コントロールの表示」をクリックしてペインを無効にします。キーボードのキーを使用してドローンを制御することもできます。 |
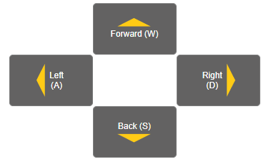
WASD キー:
W – 前進
A – 左に移動
S – 後方に移動
D – 右に移動
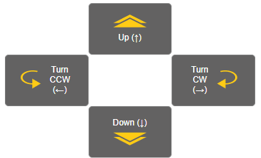
矢印キー:
▲ – ドローンを上に移動します
▼ – ドローンを下に移動します
◄ – ドローンを反時計回りに回転させます
► – ドローンを時計回りに回転させます
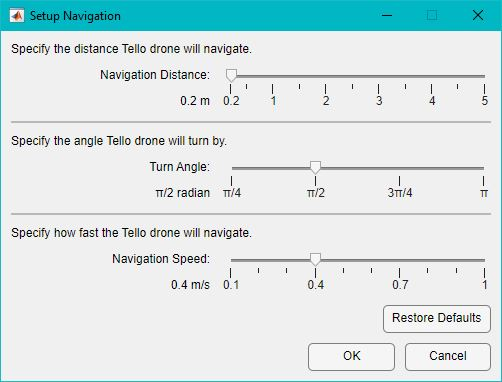
特定の方向に沿って移動をトリガーするたびに、ドローンが使用するナビゲーション設定を変更できます。 [設定] をクリックして [ナビゲーションのセットアップ] ダイアログ ボックスを開き、スライダーを使用して距離、角度、および速度の値を指定します。デフォルト値 (ナビゲーション距離: 0.2m、回転角度: π/2、ナビゲーション速度: 0.4m/s) を復元する場合は、ダイアログ ボックスで[デフォルトに戻す]をクリックします。

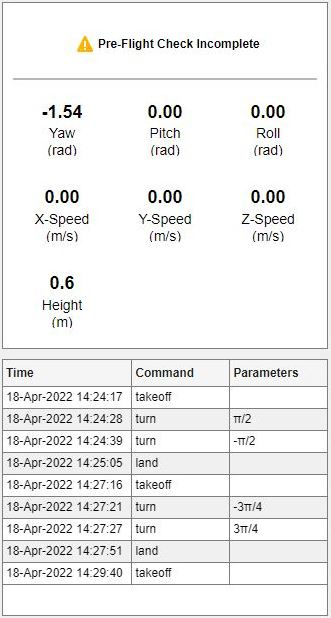
このアプリには、ライブ ナビゲーション データ (ドローンのセンサーによってキャプチャされたもの) と、ナビゲーション ボタンまたはキーボード キーを使用してトリガーしたコマンドのログも表示されます。この情報は右側のパネルに表示されます。
Ryze Tello Navigator は、Ryze Tello ドローンの FPV カメラを通して見た画像をキャプチャし、ビデオを録画するのに役立ちます。
| ステップ | アクション | 結果 |
|---|---|---|
| 1 |  一度に 1 枚の画像をキャプチャします。 一度に 1 枚の画像をキャプチャします。 | 画像はワークスペース変数として保存されます。 |
| 2 | 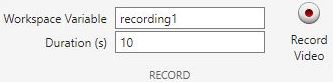 ワークスペース変数とビデオを録画する期間を定義し、[ビデオの録画] をクリックします。 ワークスペース変数とビデオを録画する期間を定義し、[ビデオの録画] をクリックします。 | ドローンのカメラからのビデオが、指定された期間記録され始めます。 [停止] をクリックすると、録画中にいつでも録画を停止でき、ビデオは画像配列としてワークスペースに自動的に保存されます。 |
Ryze Tello Navigator は、実行したナビゲーションのライブ エディター スクリプトを生成するのに役立ちます。このスクリプトを使用してドローンの初期セットアップと飛行経路を定義し、追加のワークフローを実行するためのカスタム アルゴリズムを追加できます。

これを行うには、ドローンを正常に着陸させた後、 「スクリプトの生成」をクリックします。
| 警告 | 問題と推奨されるアクション |
|---|---|
| バッテリー残量低下 | 充電残量表示が 20% 未満の値を示し、ドローンが飛行またはホバリングしている場合、アプリは警告を表示し始めます。バッテリー残量が 10% を下回ると、ドローンは現在の位置から自動的に着陸します。これを回避するには、アプリの着陸ボタンを使用してドローンを着陸させてから、ドローンのバッテリーを交換してください。 |
| 信号強度が低い | アプリはドローンの飛行中、常に信号強度の値を表示します。信号強度が 20% 未満の場合は、ドローンの制御を失わないよう、必要な措置を講じることをお勧めします。ドローンとの接続が失われた場合、ドローンと再接続するオプションを示すダイアログ ボックスが表示されます。それでも失敗する場合は、エラー メッセージが表示されます。 |
のライセンスは、この GitHub リポジトリの LICENSE.TXT ファイルで入手できます。
MATLAB セントラル
Copyright 2022 The MathWorks, Inc.


