FREA
1.0.0
 |  |
2024-09-05嬉しいニュースです! FREA が CoRL 2024 の口頭発表に採択されました ??!2024-08-10私たちのプロジェクト ページを探索してください。今ここに住んでいますか?!2024-08-10コードを公開しました!2024-06-05私たちの論文が Arxiv で入手可能になりました?!このリポジトリには論文の実装が含まれています。
FREA: 合理的な敵対性を備えた、実現可能性に基づいた安全性が重要なシナリオの生成
ケイユ・チェン1 、 ユヘン・レイ2 、 ハオ・チェン1 、 ハオラン・ウー1 、 ウェンチャオ・スン1 、 シファ・ジェン1
1清華大学車両モビリティ学部2香港大学
私たちの作品が役に立ったと思ったら、スターを付けてください?!
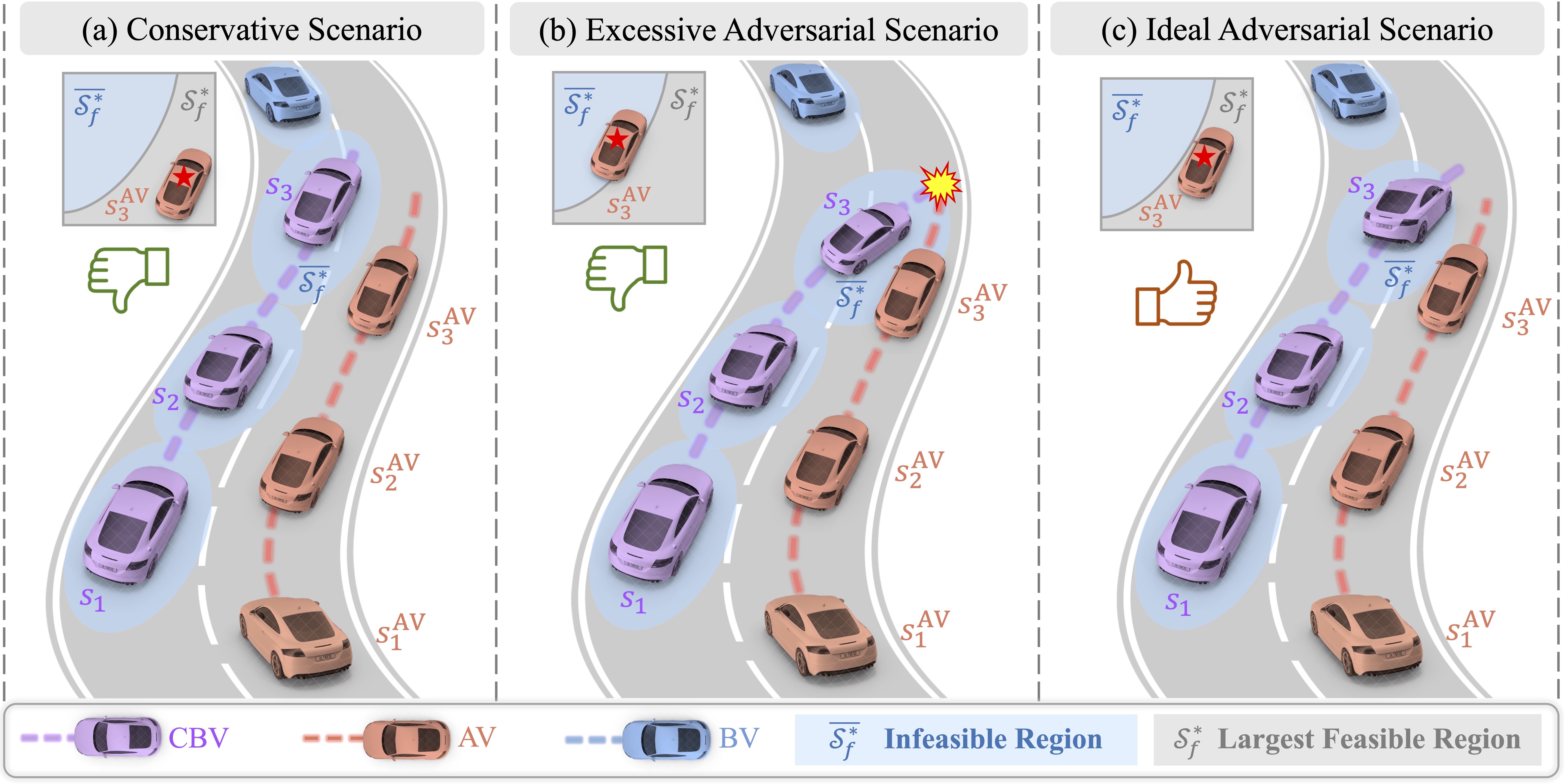
? FREA には、敵対的でありながら AV 実行可能で安全性が重要なシナリオを生成するためのガイダンスとして実現可能性が組み込まれています。
推奨システム: Ubuntu 20.04 または 22.04
ステップ 1: Carla をインストールする (0.9.13 を推奨)
ステップ 2: conda 環境をセットアップする
conda create -n frea python=3.8
conda activate freaステップ 3: この git リポジトリのクローンを適切なフォルダーに作成します
git clone [email protected]:CurryChen77/FREA.gitステップ 4: リポジトリのルート フォルダーに移動し、パッケージをインストールします。
cd FREA
pip install -r requirements.txt
pip install -e . # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Launch in another terminal
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_train.yaml --mode collect_feasibility_data # Merge data
python frea/feasibility/unify_offline_data.pyここからダウンロードした論文でオフライン データセットを使用するには、それらをfeasibilityフォルダーに置きます。
# Train optimal feasible value function of AV
python train_feasibility.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_adv_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FPPO-RS
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_rs_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train PPO
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg ppo_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg fppo_adv_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg standard_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode analysis # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode render評価が完了し、結果がフォルダーに保存されていることを確認してください。
# Process the recorded data
python eval_analysis/process_data/process_all_data.py
# Plot the evaluation result
python eval_analysis/plot_data/plot_evaluation_result.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Set world spectator
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -sp # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize AV route
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -viz_route # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize BEV map
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode render私たちの論文が役に立ったと思われる場合は、次の方法で引用してください。
@inproceedings{
chen2024frea,
title={{FREA}: Feasibility-Guided Generation of Safety-Critical Scenarios with Reasonable Adversariality},
author={Keyu Chen and Yuheng Lei and Hao Cheng and Haoran Wu and Wenchao Sun and Sifa Zheng},
booktitle={8th Annual Conference on Robot Learning},
year={2024},
url={https://openreview.net/forum?id=3bcujpPikC}
}
この実装は、いくつかのリポジトリのコードに基づいています。著者の素晴らしい作品に心から感謝します。


