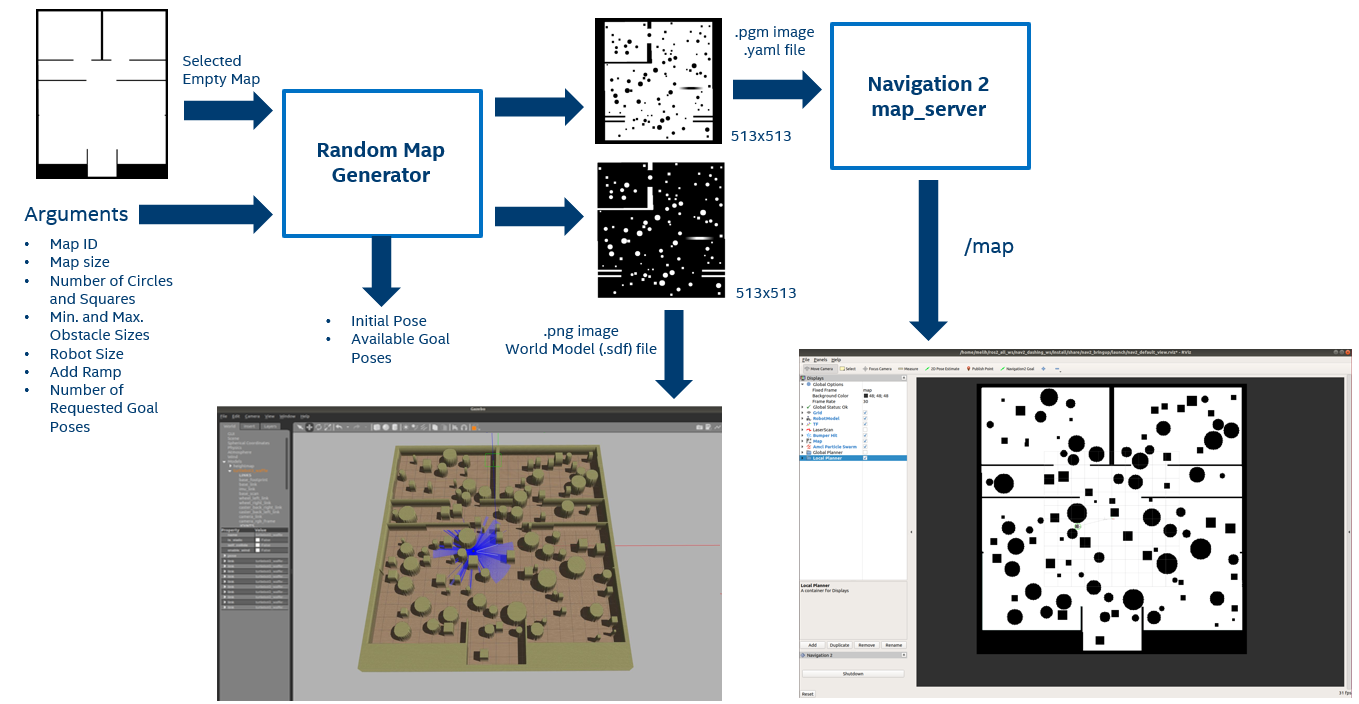
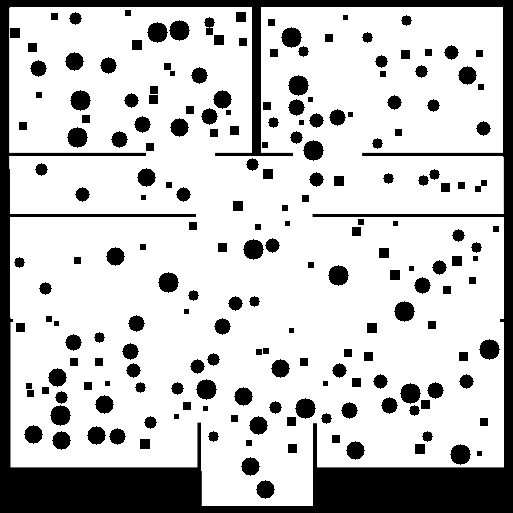
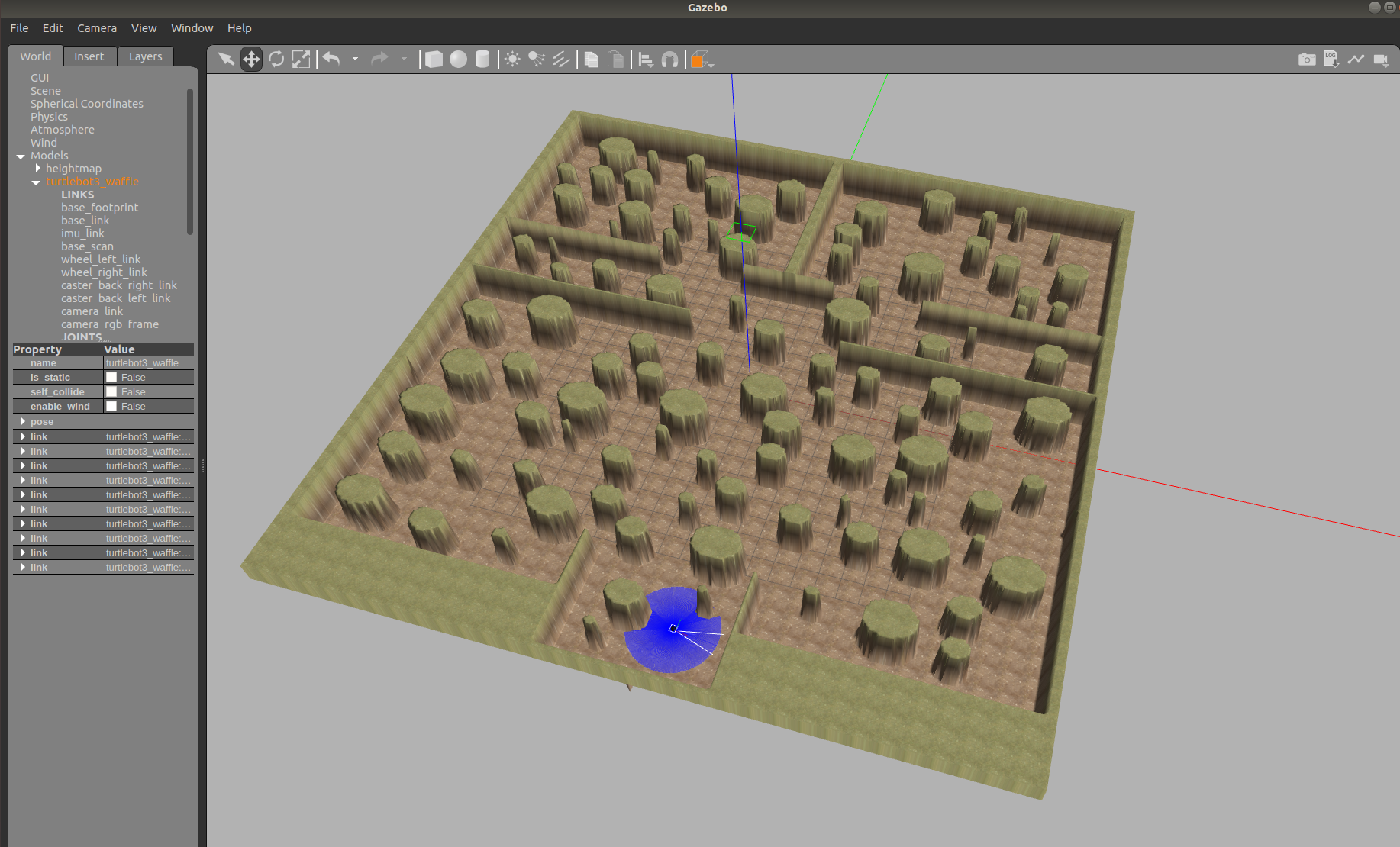
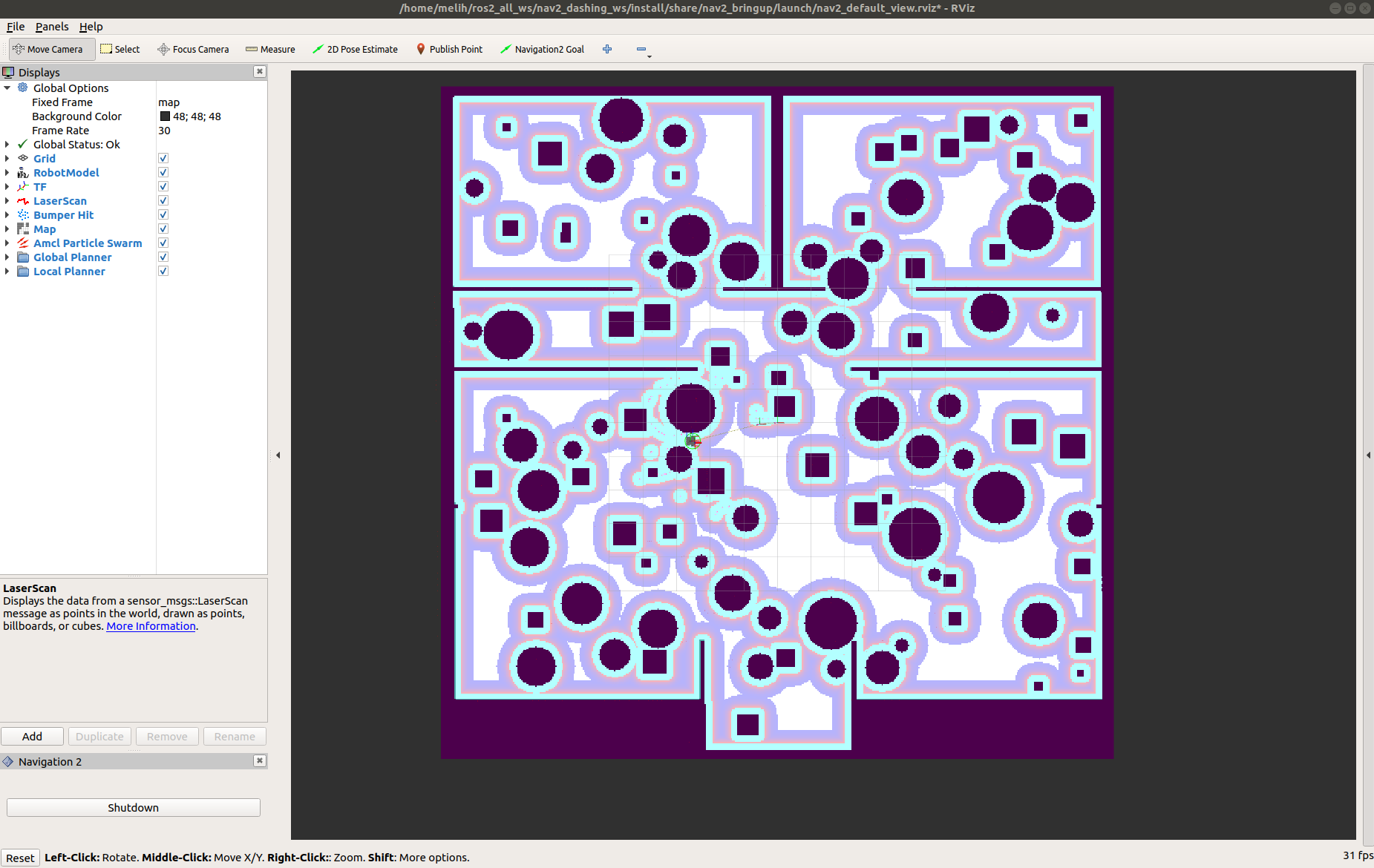
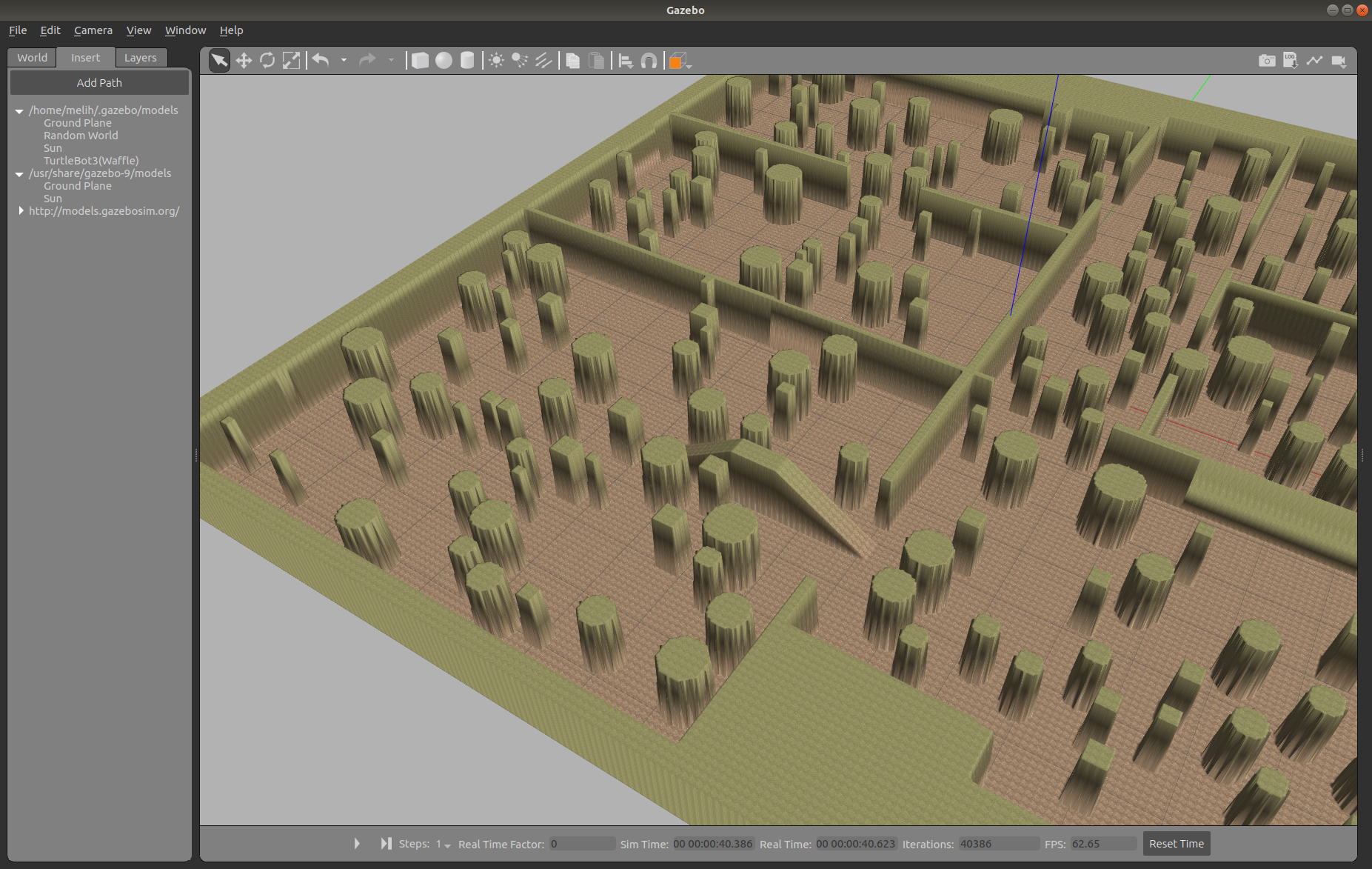
このツールは、Navigation 2 と Gazebo で使用できるランダムに生成されたマップと世界モデルを作成します。 HouseExpo データセットのごく一部を使用します。 2Dの空の手描きの屋内レイアウト画像のセットです。空のマップは、maps ディレクトリにあります。ランダム マップ ジェネレーターは、グレースケール マップに障害物をランダムに配置します。マップは .png 形式である必要があります。現在、円、正方形、ランプの追加がサポートされています。サイズ、形状、種類、障害物間の距離はユーザーが設定できます。 Gazebo ハイトマップは、ランダムに生成されたマップの Gazebo ワールド モデルを作成するために使用されます。 random_world ディレクトリを .gazebo/model ディレクトリにコピーして、Gazebo で使用することができます。生成されるマップのサイズは 2^n+1 x 2^n+1 である必要があります。そうしないと、Gazebo では動作しません。 Gazebo のワールド モデルのサイズは 20 メートル x 20 メートルにスケールされます。
sudo apt-get update
sudo apt-get upgrade
OpenCVをインストールする
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libopencv-dev
cd nav2_random_map_generator
make
または
cd src
g++ circle.cpp main.cpp map.cpp obstacle.cpp ramp.cpp rmg.cpp square.cpp -o random-map `pkg-config --cflags --libs opencv`
./map_generator <Map Id> <Number_of_Circles> <Number_of_Squares> <Robot_Size (px*0.03898)> <Map_Size(x)> <Map_Size(y)> <Min_Circle_Radius> <Max_Circle_Radius> <Min Square_Size> <Max_Circle_Radius> <Add Ramp> <Show_Map>
例:
./map_generator 10 200 200 5 513 513 5 10 5 10 1 1
./map_generator h
ラムダム マップ TB3 テスト ビデオ
ランダムマップランプテストビデオ


