marabunta
1.0.0
人工的な群れの設計と制御のための Python ライブラリ。
このパッケージには、人工群れにおける実験研究を行うことを目的として、 (i)移動、 (ii)センシング、および(iii)通信が可能なロボットの特定のハードウェア部分を制御またはシミュレートするためのツールが含まれています。これらのツールを使用して構築された群れ動作のモデルもいくつか含まれています。詳細については、http://journal.frontiersin.org/article/10.3389/frobt.2017.00012/を参照してください。
このライブラリを使用したロボットの設計は、次の 3 つの主要な部分で構成されます。
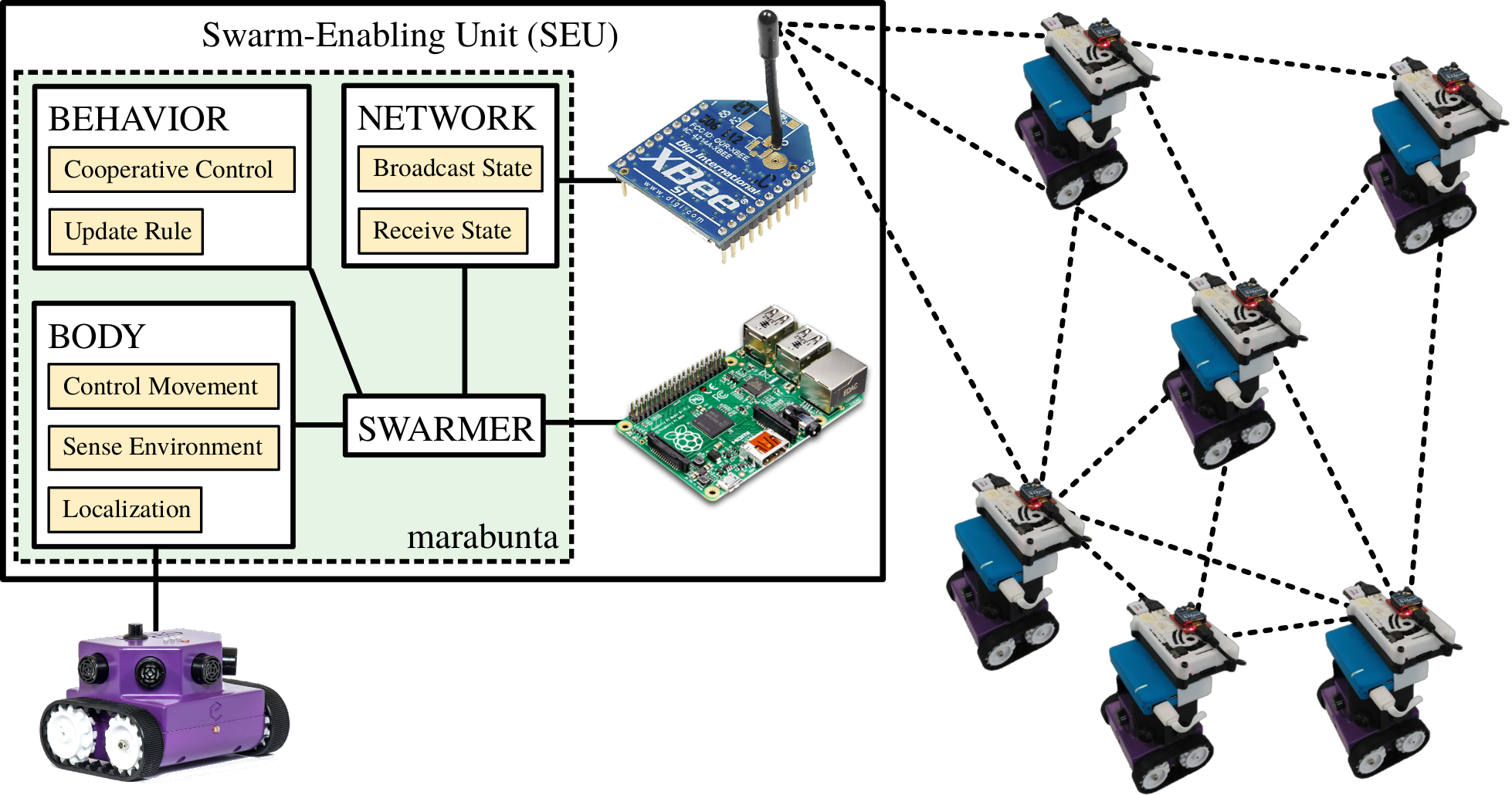
marabunta ライブラリはこの構造に従い、次のクラスを提供します。
Bodyの最小モデル。 BaseRobotによって受け入れられるように、ボディ モデルはこのクラスから継承する必要があります。Body実装。使用するハードウェアは必要ありません。座標のリストを含むファイルをロードして、シミュレーションに障害物を含めることができます。Body実装。 Bluetooth 接続、eBot、および適切な eBot-API がインストールされている必要があります。Networkの最小モデル。すべてのネットワーク モデルは、BaseRobot によって受け入れられるように、このクラスを継承する必要があります。Network実装 (異なるロボットが同じコンピューター上にある、または少なくとも同じファイルにアクセスできると想定)。使用するハードウェアは必要ありません。Network実装。シリアルポート経由で接続されたXBeeが必要です。BaseBodyから継承するボディインスタンスとBaseNetworkから継承するネットワークインスタンスが必要です。MockBodyで障害物検出をシミュレートするためにマップ データを保存およびアクセスするためのオブジェクト。障害物はファイルからロードされ、ローカルの障害物データに高速にアクセスするために「Verlet リスト」を使用してグリッドに保存されます。 モジュールをインストールするには、次のように入力します。
python setup.py install (システムによってはsudo必要な場合があります)。これにより、 marabuntaモジュールとそのmarabunta.modelsサブモジュールがインストールされます。
eBotBodyを通じて eBot を制御するには、eBot-API をインストールする必要があります。正式バージョンは https://github.com/EdgeBotix/eBot-API にあります。 eBot ローカリゼーションに依存する代わりに、ホスト CPU を使用してカルマン フィルターを実装してロボットのローカリゼーションを計算する、この API のフォークは、https://github.com/david-mateo/eBot-API にあります。
ロボットの動作を設計するには、 BaseRobotを継承する新しいクラスを定義する必要があります。 BaseRobotの初期化には、 BaseBodyから継承するクラスとして実装されるボディと、 BaseNetworkから継承するクラスとして実装されるネットワークが必要です。
新しいハードウェアのサポートを追加するには、 BaseBodyまたはBaseNetworkから継承するクラスを実装する必要があります。これらのクラスには、本体またはネットワークが実装する必要がある最小限のメソッドのリストが含まれています。
提供されたメソッドを使用して特定の動作 (ヘディングコンセンサスなど) に従ってロボットを動かすには、本体、ネットワーク、ロボットを定義し、電源を入れて、そのupdateメソッドを繰り返し呼び出す必要があります。最小限のコード例は次のとおりです。
from marabunta import eBotBody , XBeeNetwork
from marabunta . models import HeadingConsensusRobot
total_time = 60
ID = "Walle"
init_pos = [ 0. , 0. ]
init_heading = 0.
communication_slot = 0.1
body = ebotBody ( init_pos , init_heading )
network = XBeeNetwork ( communication_slot , communication_slot + 0.1 , 1 , ID )
robot = HeadingConsensusRobot ( body , network )
robot . turn_on ()
# MAIN LOOP
end_time = time () + total_time
while time () < end_time :
robot . update ( dt , speed )
sleep ( dt )
robot . turn_off () BaseRobotから継承するロボットには__enter__メソッドと__exit__メソッドがあり、ロボットを明示的にオンまたはオフにする代わりにwithステートメントでロボットを使用できるようになります。このオプションは、潜在的なハードウェア障害に直面してロボットを操作するためのよりクリーンな方法を提供します。このアプローチに従った最小限のコード例は次のとおりです。
from marabunta import eBotBody , XBeeNetwork
from marabunta . models import HeadingConsensusRobot
total_time = 60
ID = "Walle"
init_pos = [ 0. , 0. ]
init_heading = 0.
communication_slot = 0.1
body = ebotBody ( init_pos , init_heading )
network = XBeeNetwork ( communication_slot , communication_slot + 0.1 , 1 , ID )
with HeadingConsensusRobot ( body , network ) as robot :
# MAIN LOOP
end_time = time () + total_time
while time () < end_time :
robot . update ( dt , speed )
sleep ( dt ) examples/に含まれるスクリプトでロボットを操作するいくつかの方法を見つけることができます。


