AdaBoost_Seg
1.0.0
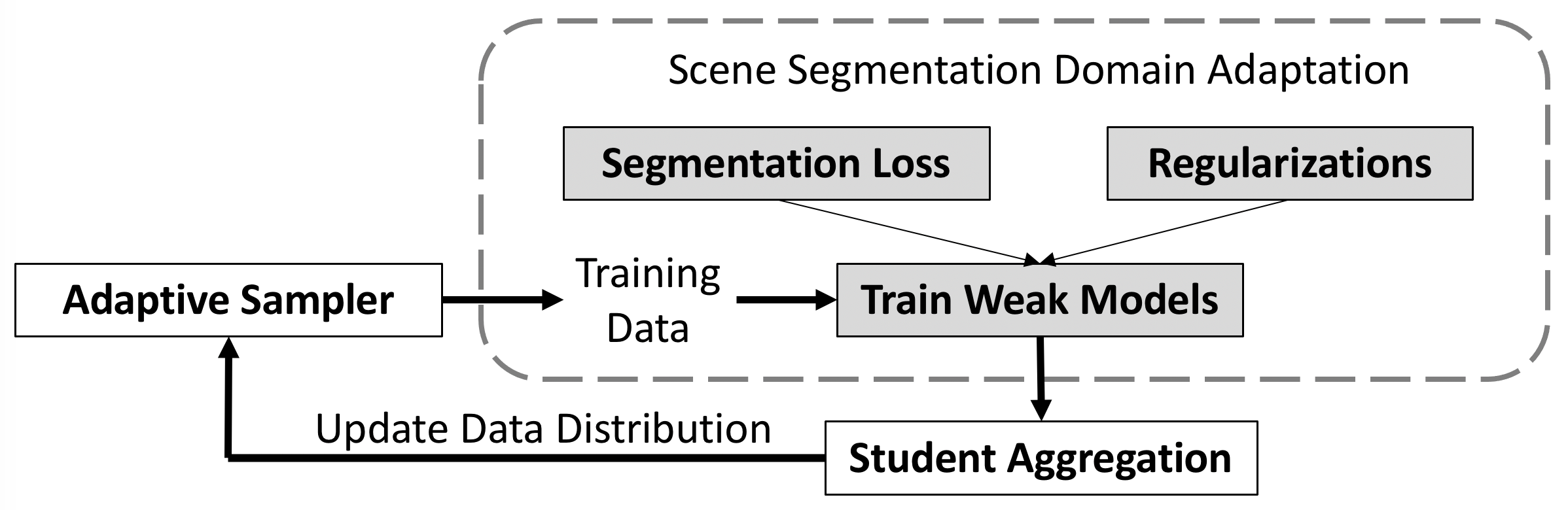 このリポジトリでは、論文「ドメイン適応のためのアダプティブ ブースティング: シーン セグメンテーションにおける堅牢な予測に向けて」のコードを提供します。
このリポジトリでは、論文「ドメイン適応のためのアダプティブ ブースティング: シーン セグメンテーションにおける堅牢な予測に向けて」のコードを提供します。
[論文] [中文解读]
ucmerced の元の DeepLab リンクが失敗します。以下のリンクをご利用ください。
[Google ドライブ] https://drive.google.com/file/d/1BMTTMCNkV98pjZh_rU0Pp47zeVqF3MEc/view?usp=share_link
【ワンドライブ】 https://1drv.ms/u/s!Avx-MJllNj5b3SqR7yurCxTgIUOK?e=A1dq3m
または使用します
pip install gdown
pip install --upgrade gdown
gdown 1BMTTMCNkV98pjZh_rU0Pp47zeVqF3MEc
この方法を他の分野に採用する場合は、タスクとデータセットに合わせて温度に応じてサンプリングの重みを調整することをお勧めします。本稿では変更せずに 1 のままとします。
私たちの最近の実験では、論文で報告されている数値より 49.72% (MRNet+Ours) という優れたパフォーマンスを達成できました。集約モデルが収束すると、広告ブースト サンプラーの更新が遅くなり、パフォーマンスも低下すると考えられます。サンプラーを更新するために最近のスナップショットにより多くの重みを与えると、より適切に機能します。
python train_ms.py --snapshot-dir ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0_recent --drop 0.1 --warm-up 5000 --batch-size 2 --learning-rate 2e-4 --crop-size 1024,512 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0 --often-balance --use-se --swa --swa_start 0 --adaboost --recent[GTA5] と [Cityscapes] をダウンロードして基本コードを実行します。あるいは、[SYNTHIA] と [OxfordRobotCar] から追加の 2 つのデータセットをダウンロードすることもできます。
GTA5 データセットをダウンロードする
SYNTHIA データセット SYNTHIA-RAND-CITYSCAPES (CVPR16) をダウンロードする
都市景観データセットをダウンロードする
オックスフォード ロボットカー データセットをダウンロードする
データフォルダーは次のような構造になっています。
├── data/
│ ├── Cityscapes/
| | ├── data/
| | ├── gtFine/
| | ├── leftImg8bit/
│ ├── GTA5/
| | ├── images/
| | ├── labels/
| | ├── ...
│ ├── synthia/
| | ├── RGB/
| | ├── GT/
| | ├── Depth/
| | ├── ...
│ └── Oxford_Robot_ICCV19
| | ├── train/
| | ├── ...
ステージ I: (約 49.0%)
python train_ms.py --snapshot-dir ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0 --drop 0.1 --warm-up 5000 --batch-size 2 --learning-rate 2e-4 --crop-size 1024,512 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0 --often-balance --use-se --swa --swa_start 0 --adaboost疑似ラベルの生成:
python generate_plabel_cityscapes.py --restore ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0/GTA5_40000_average.pthステージ II (修正された疑似ラベル付き): (約 50.9%)
python train_ft.py --snapshot-dir ./snapshots/Adaboost_1280x640_restore_ft48_GN_batchsize2_960x480_pp_ms_me0_classbalance7_kl0_lr4_drop0.2_seg0.5_BN_80_255_0.8_Noaug_swa2.5W_t97 --restore-from ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0/GTA5_40000_average.pth --drop 0.2 --warm-up 5000 --batch-size 2 --learning-rate 4e-4 --crop-size 960,480 --lambda-seg 0.5 --lambda-adv-target1 0 --lambda-adv-target2 0 --lambda-me-target 0 --lambda-kl-target 0 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0 --often-balance --use-se --input-size 1280,640 --train_bn --autoaug False --swa --adaboost --swa_start 25000 --threshold 97ステージ I:
python train_ms_synthia.py --snapshot-dir ./snapshots/AdaBoost_SWA_SY_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_power0.5 --drop 0.1 --warm-up 5000 --batch-size 2 --learning-rate 2e-4 --crop-size 1024,512 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0 --often-balance --use-se --swa --swa_start 0 --adaboost 疑似ラベルの生成:
python generate_plabel_cityscapes_SYNTHIA.py --restore ./snapshots/AdaBoost_SWA_SY_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_power0.5/GTA5_50000_average.pthステージ II:
python train_ft_synthia.py --snapshot-dir ./snapshots/Cosine_Adaboost_SY_1280x640_restore_ft_GN_batchsize8_512x256_pp_ms_me0_classbalance7_kl0.1_lr8_drop0.1_seg0.5_BN_255_Noaug_t777_swa2.5W --restore ./snapshots/AdaBoost_SWA_SY_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_power0.5/GTA5_50000_average.pth --drop 0.1 --warm-up 5000 --batch-size 8 --learning-rate 8e-4 --crop-size 512,256 --lambda-seg 0.5 --lambda-adv-target1 0 --lambda-adv-target2 0 --lambda-me-target 0 --lambda-kl-target 0 --norm-style gn --class-balance --only-hard-label 50 --max-value 7 --gpu-ids 0 --often-balance --use-se --input-size 1280,640 --autoaug False --swa --swa_start 25000 --threshold 777 --adaboost --train_bn --cosineステージ I: (約 73.80%) 紙よりも高い。
python train_ms_robot.py --snapshot-dir ./snapshots/Adaboost_SWA3W_Robot_SE_GN_batchsize6_adapative_kl0.1_sam_lr6 --drop 0.1 --warm-up 5000 --batch-size 6 --learning-rate 6e-4 --crop-size 800,400 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0,1,2 --often-balance --use-se --swa --swa_start 30000 --adaboost --sam疑似ラベルの生成:
python generate_plabel_robot.py --restore ./snapshots/Adaboost_SWA3W_Robot_SE_GN_batchsize6_adapative_kl0.1_sam_lr6/GTA5_70000_average.pthステージ II: (約 75.62%)
python train_ft_robot.py --snapshot-dir ./snapshots/Adaboost_0.9RB_b3_lr3_800x432_97_swa0W_T80 --restore-from ./snapshots/Adaboost_SWA3W_Robot_SE_GN_batchsize6_adapative_kl0.1_sam_lr6/GTA5_70000_average.pth --drop 0.1 --warm-up 5000 --batch-size 3 --learning-rate 3e-4 --crop-size 800,432 --lambda-seg 0.5 --lambda-adv-target1 0 --lambda-adv-target2 0 --lambda-me-target 0 --lambda-kl-target 0 --norm-style gn --class-balance --only-hard-label 50 --max-value 7 --gpu-ids 0,1,2 --often-balance --use-se --input-size 1280,960 --train_bn --adaboost --swa --swa_start 0 --threshold 0.8 --autoaug Falseステージ I: (約 39.5%)
python train_ms.py --snapshot-dir ./snapshots/255VGGBN_Adaboost_SWA_SE_GN_batchsize3_1024x512_pp_ms_me0_classbalance7_kl0.1_lr3_drop0.1_seg0.5_swa0_auto --drop 0.1 --warm-up 5000 --batch-size 3 --learning-rate 3e-4 --crop-size 1024,512 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0,1,2 --often-balance --use-se --swa --swa_start 0 --adaboost --model DeepVGG --autoaug python evaluate_cityscapes.py --restore-from ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0/GTA5_40000_average.pthトレーニング済みモデルは [Wait] で入手できます。
SYが含まれるフォルダーは SYNTHIA-to-Cityscapes 用ですRBが付いているフォルダーは、Cityscapes-to-Robot Car 用です。コアコードは比較的シンプルなので、他の作品に直接適用できます。
アダプティブ データ サンプラー: https://github.com/layumi/AdaBoost_Seg/blob/master/train_ms.py#L429-L436
学生の集計: https://github.com/layumi/AdaBoost_Seg/blob/master/train_ms.py#L415-L427
また、以下のような素晴らしい作品に感謝の意を表します。
@article { zheng2021adaboost ,
title = { Adaptive Boosting for Domain Adaptation: Towards Robust Predictions in Scene Segmentation } ,
author = { Zheng, Zhedong and Yang, Yi } ,
journal = { IEEE Transactions on Image Processing } ,
doi = { 10.1109/TIP.2022.3195642 } ,
note = { mbox{doi}:url{10.1109/TIP.2022.3195642} } ,
year = { 2021 }
}

