Car Simulator
1.0.0
カー シミュレーターは、ファジー制御システム、遺伝的アルゴリズム、粒子群最適化を使用して、地図上で自動運転車の動きをシミュレートします。 VRデバイスにも対応しています。詳しくはこちらをご覧ください。
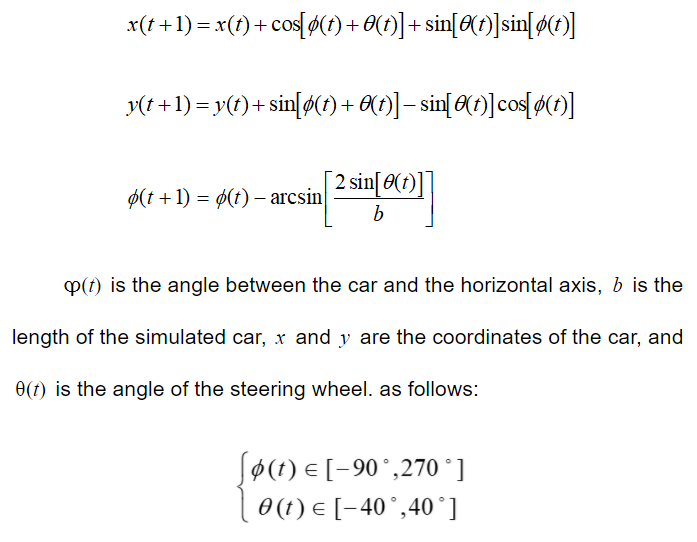
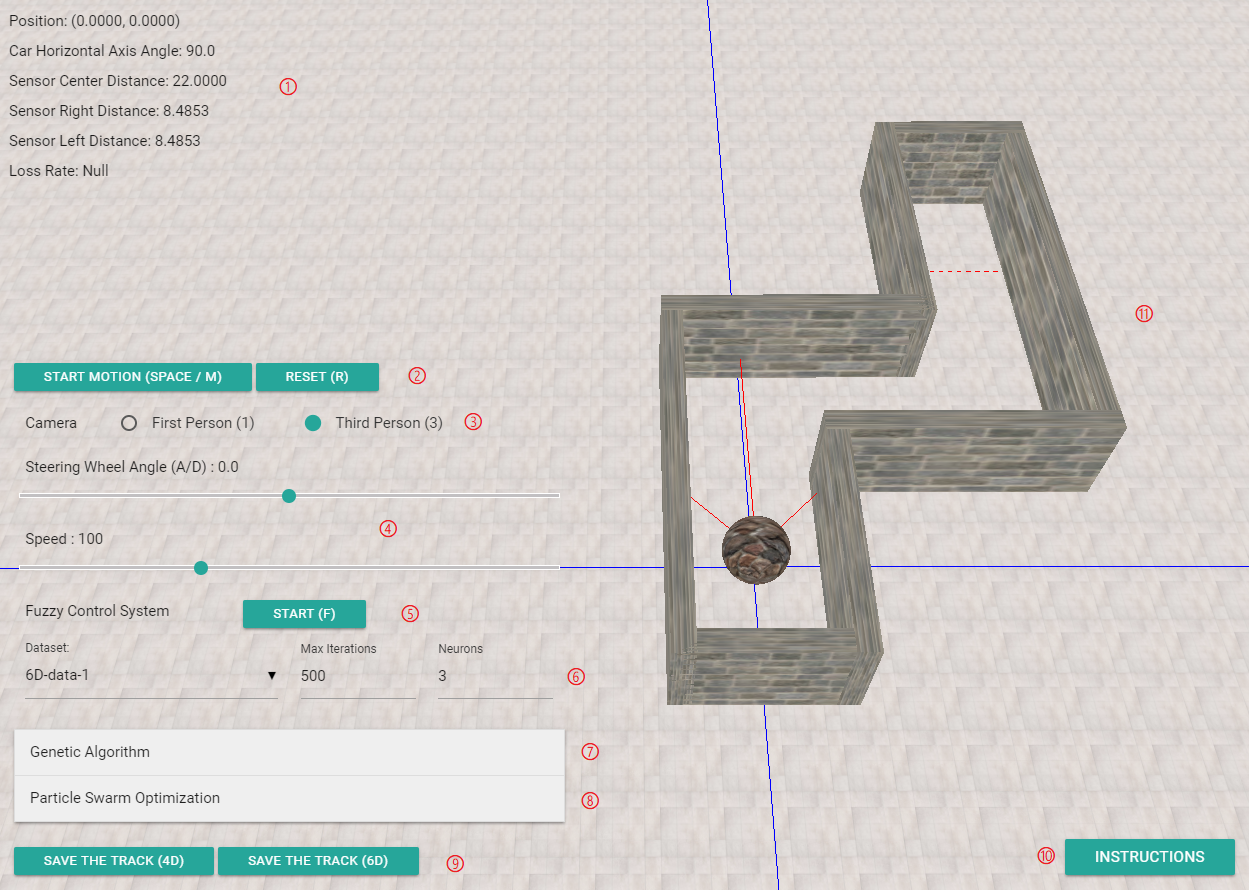
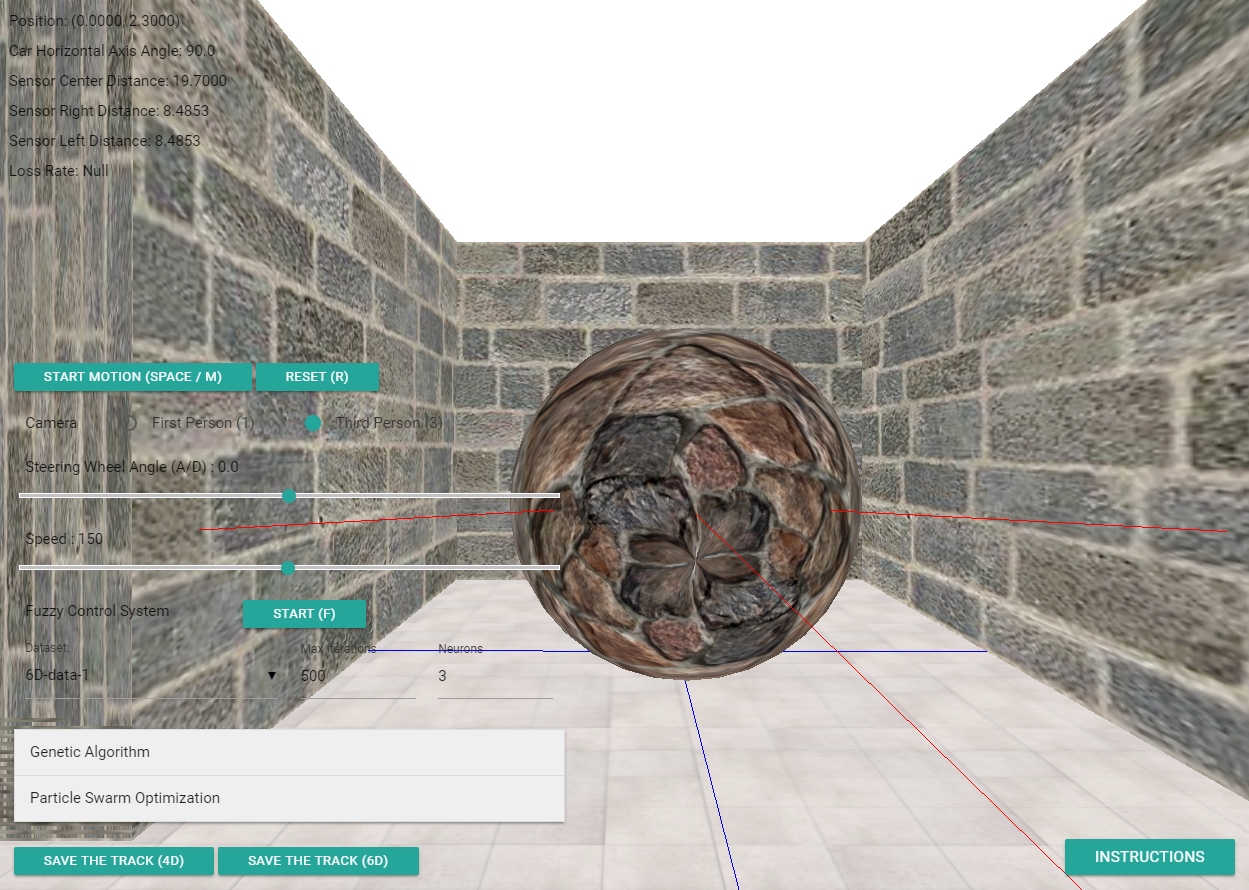
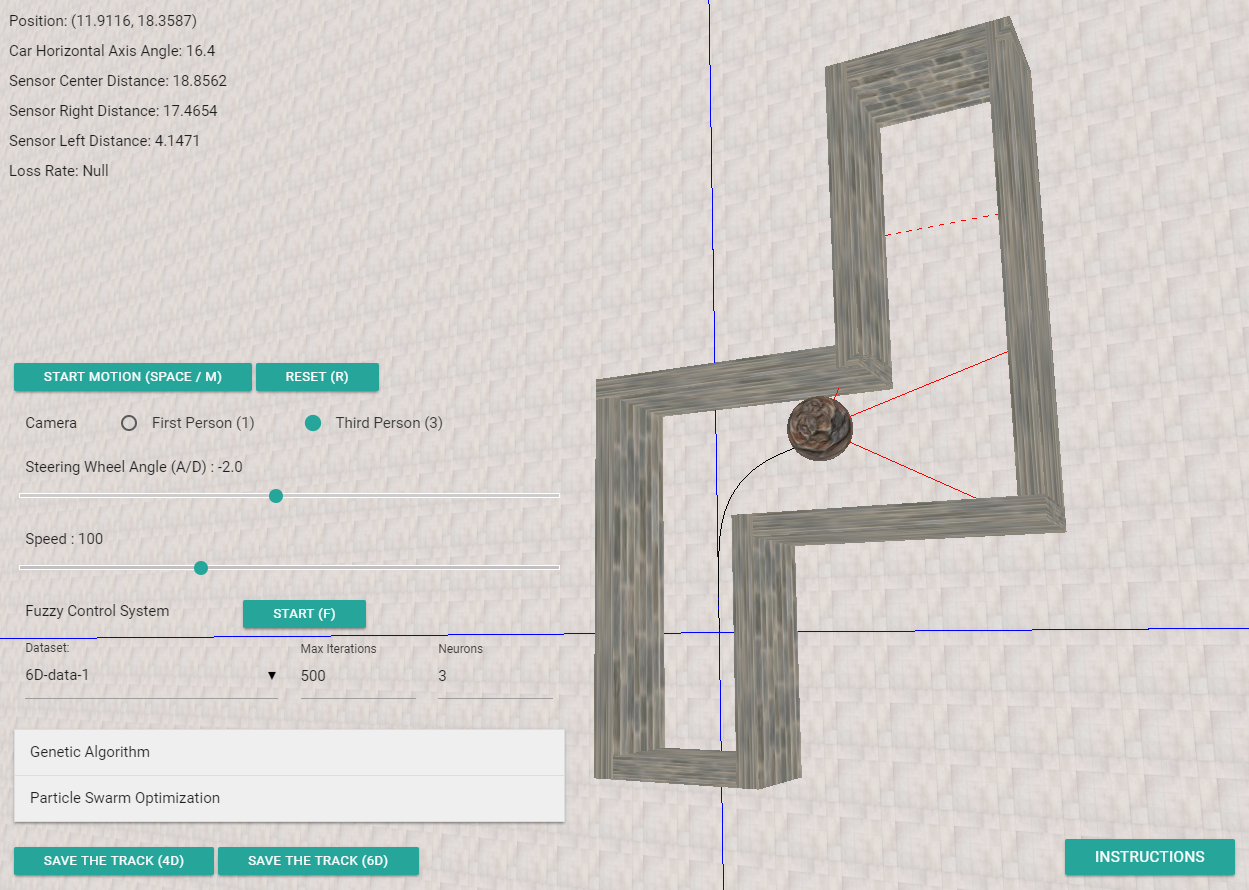
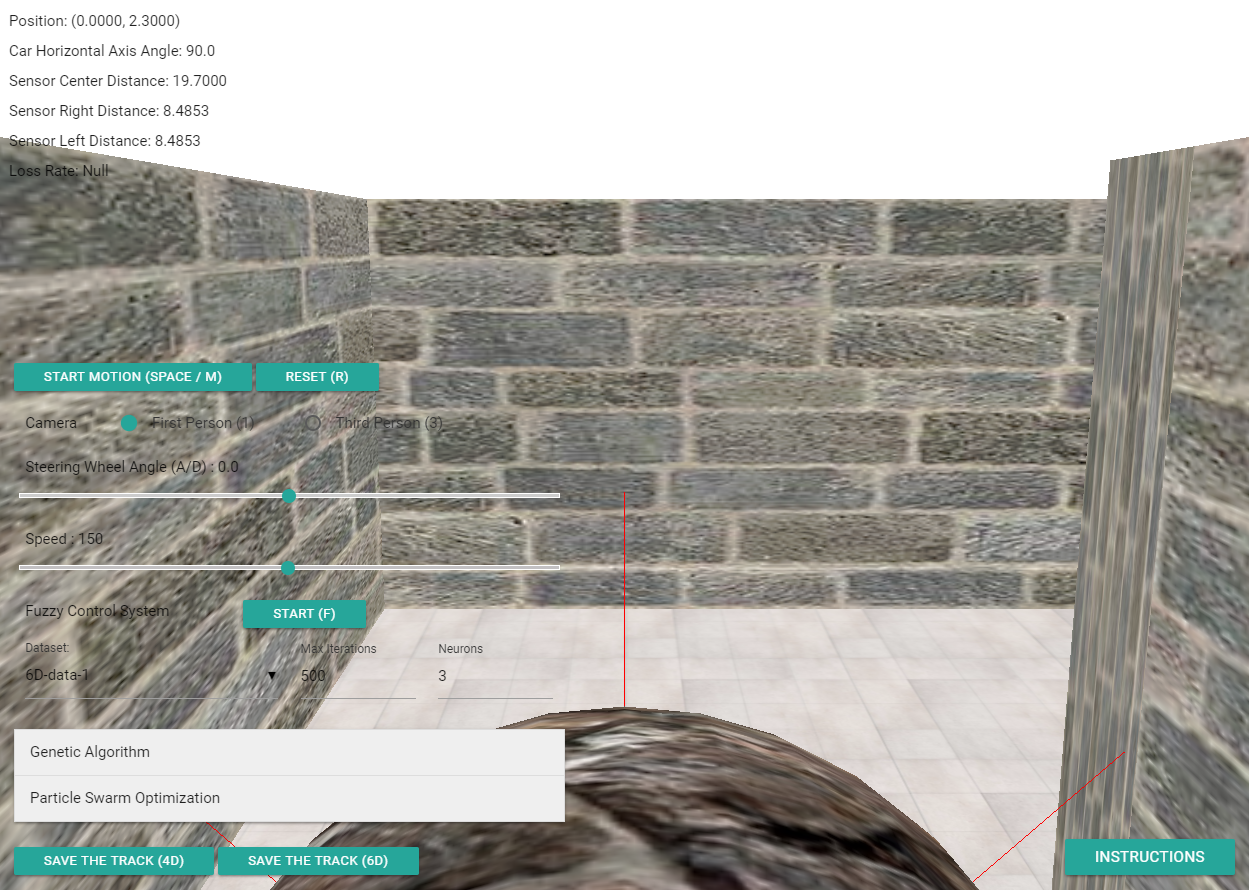
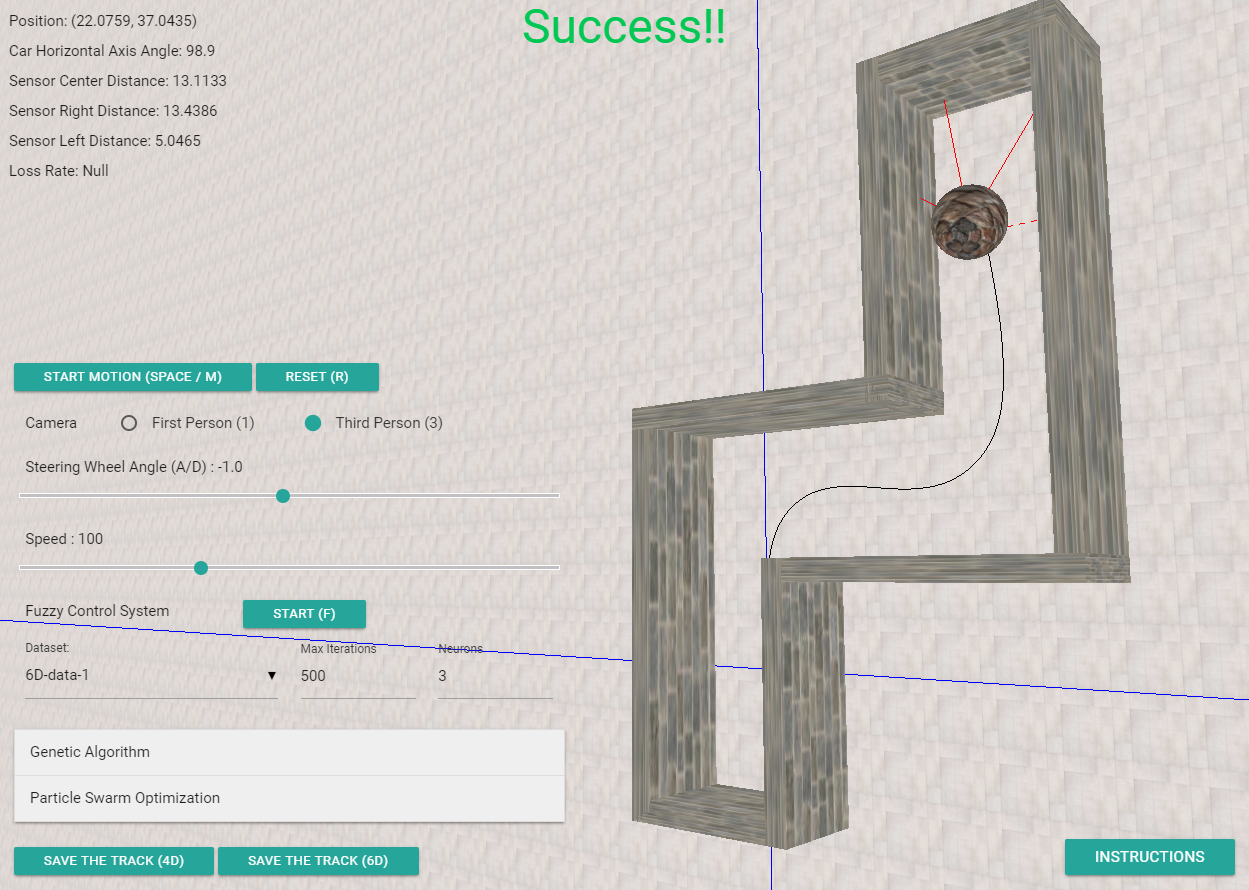
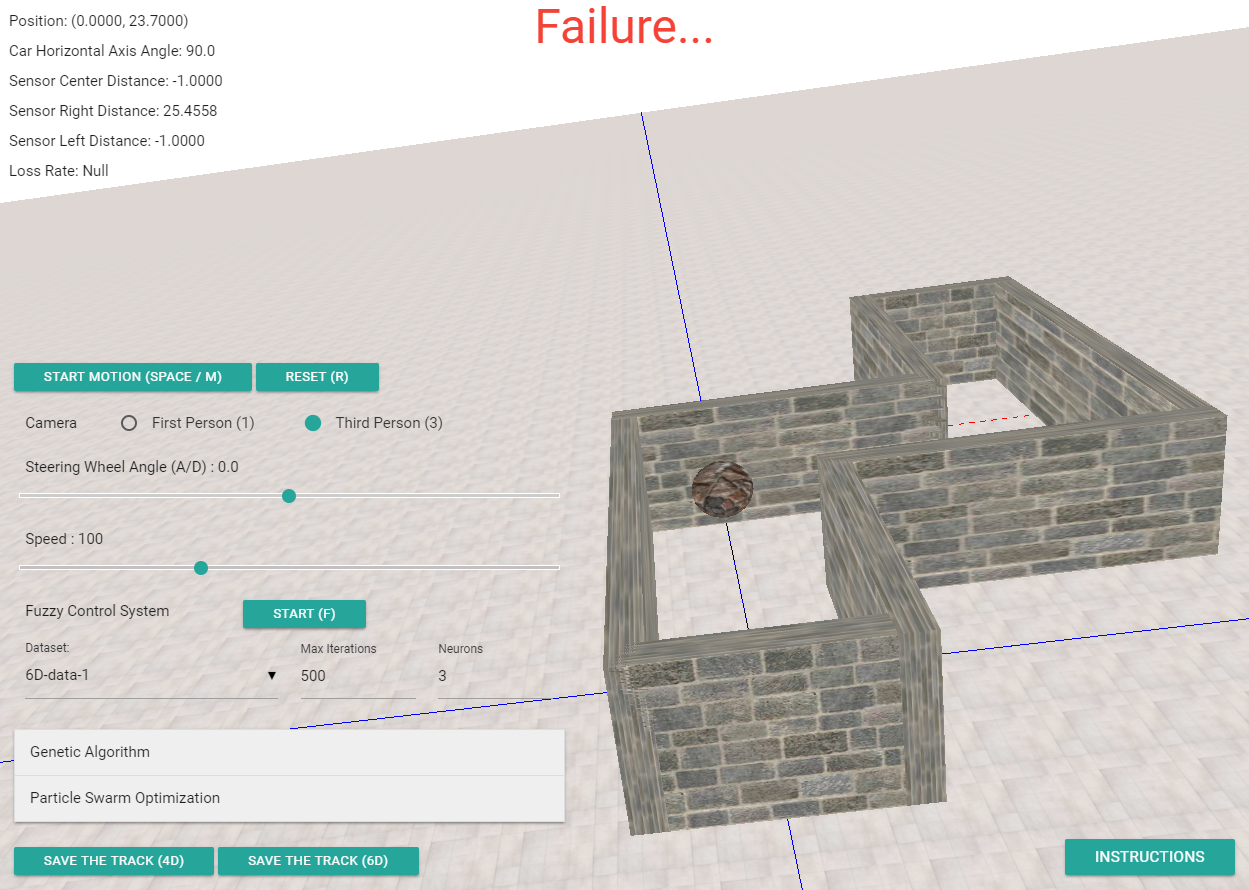
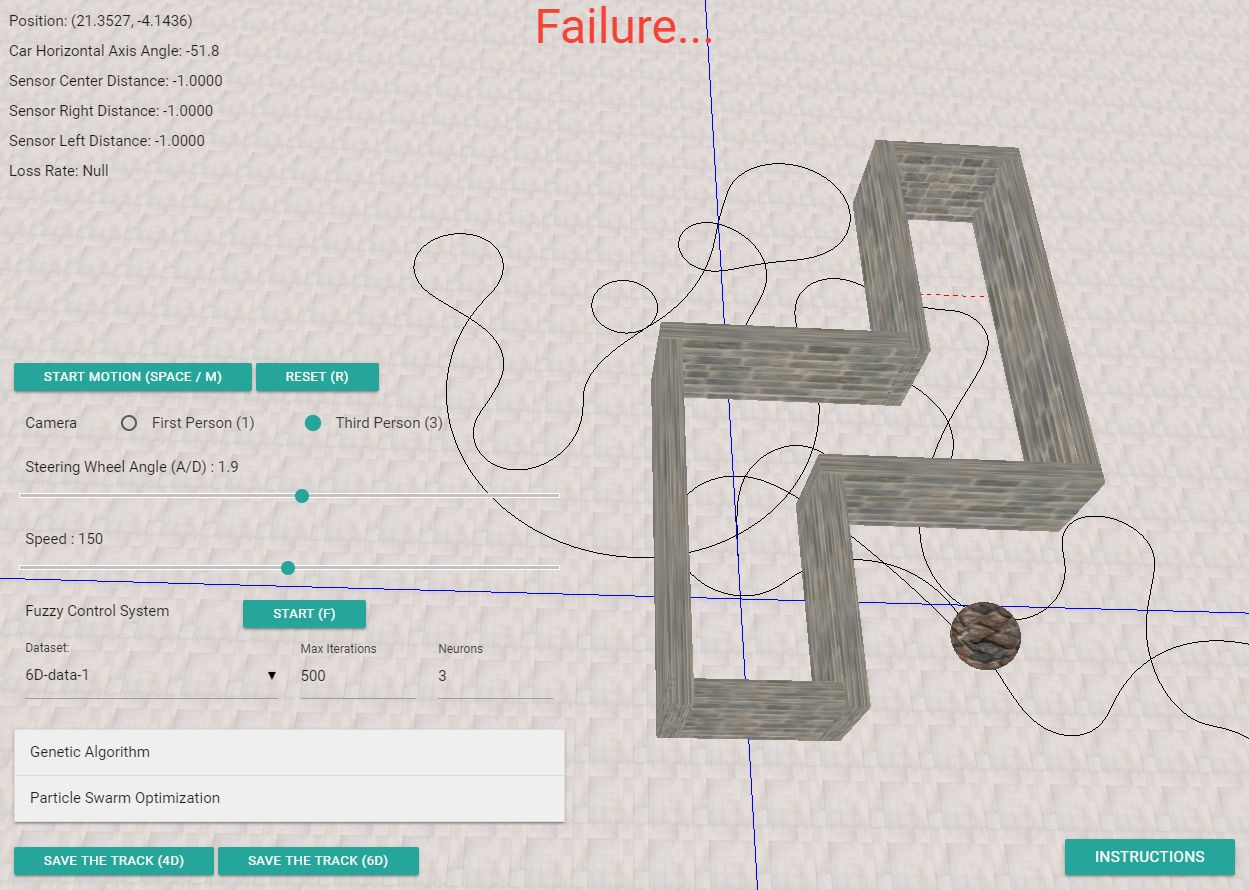
入力には、車の 3 つの距離センサー (前方、左右 45 度) が含まれており、定義された運動方程式、車の位置、車と水平軸の間の角度から取得できます。出力はステアリングホイールの回転角度です。
壁にぶつからずにエンドラインに到達することを目標とし、その移動軌跡(各時点の位置、センサー値、ハンドルの回転角度など)をテキストファイルとして出力し、グラフィカルインターフェース上に表示します。
シミュレートされた自動車の運動方程式は次のとおりです。
ファジィ制御システムは、カスタム 7 つのファジィ ルールと個別の重心デファジファイアを使用します。詳細はこちらをご覧ください。
カー シミュレータは、実数値遺伝的アルゴリズム (GA) を使用して動径基底関数ネットワーク (RBFN) をトレーニングし、車は RBFN によって制御されます。遺伝子は混合次元ベクトルの RBFN (w, m, σ) の 3 つのパラメータとして定義されます。適合度関数は、データセットの予想出力と特定の入力ケースにおける RBFN 出力の平均分散です。最も低い適合度値が最良の RBFN パラメータです。
放射状基本関数ネットワークの構造は次のとおりです。
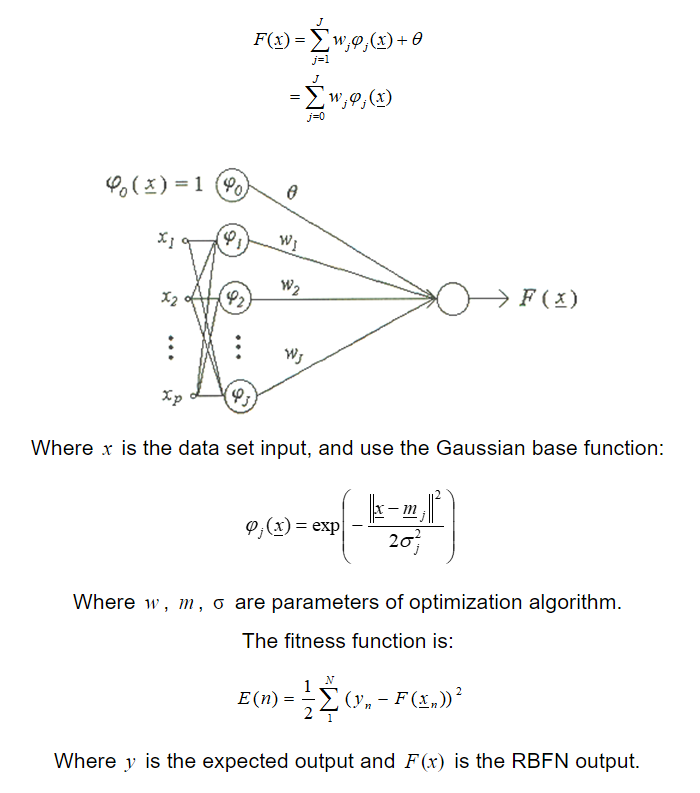
Car Simulator は、粒子群最適化 (PSO) を使用して RBFN をトレーニングすることもできます。 PSO 座標は混合次元ベクトルの RBFN (w, m, σ) の 3 つのパラメータとして定義されます。適合度関数は、データセットの予想出力と特定の入力ケースにおける RBFN 出力の平均分散です。最も低い適合度値が最良の RBFN パラメーターです。
https://jasonnor.github.io/Car-Simulator/
Car Simulator は VR デバイスもサポートしています。このページを開いてください。
InputA1 InputB1 InputC1 Output1
InputA2 InputB2 InputC2 Output2
...
ここで、InputA は中央距離センサーの値、InputB は右距離センサーの値、InputC は左距離センサーの値、出力はステアリングホイールの回転角度です。デフォルトのデータセットはここにあります。
InputA1 InputB1 InputC1 InputD1 InputE1 Output1
InputA2 InputB2 InputC2 InputD1 InputE1 Output2
...
ここで、InputA は車の X 座標、InputB は車の Y 座標、InputC は中央距離センサーの値、InputD は右距離センサーの値、InputE は左距離センサーの値、出力はステアリングホイールの回転角度です。デフォルトのデータセットはここにあります。
問題を修正したり、コードベースに直接貢献したりすることに興味がある場合は、自由に使用してください。
Car Simulator は MIT ライセンスに基づいてリリースされています。詳細については、LICENSE ファイルを参照してください。


