pi zero pytorch
0.1.5
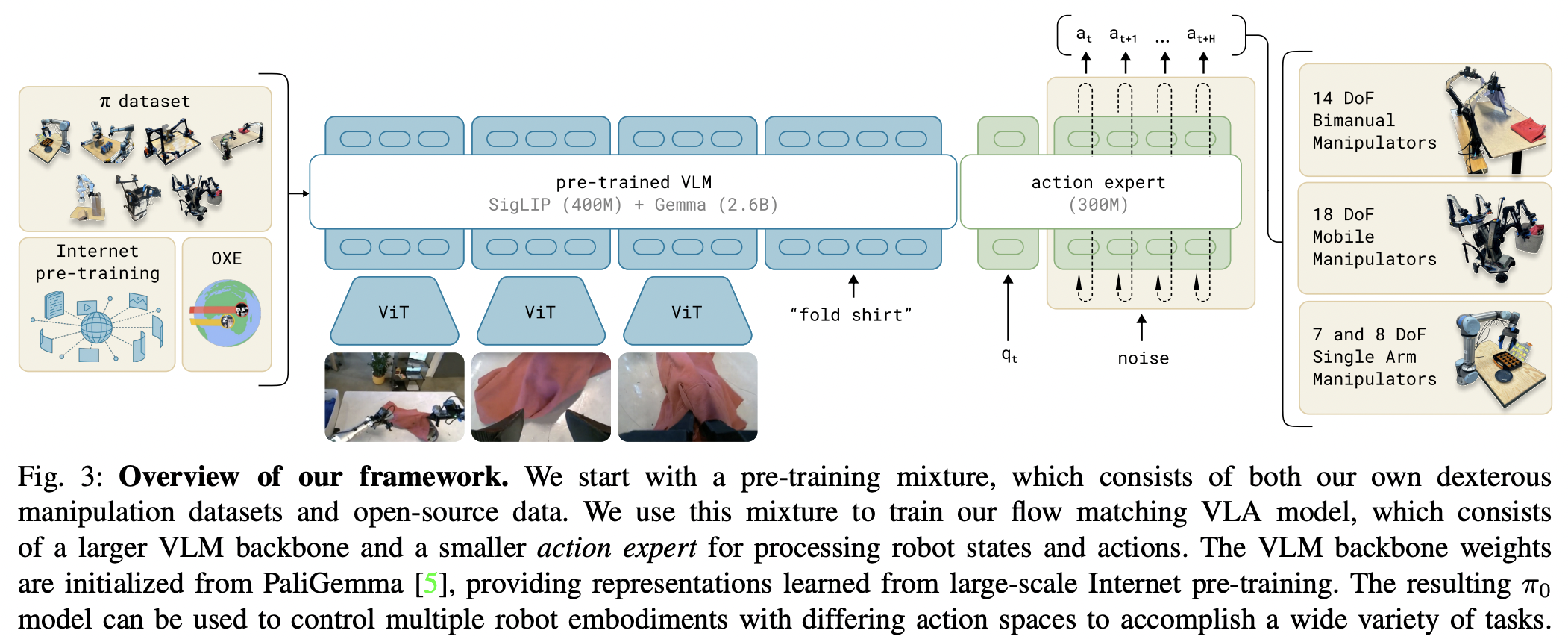
Physical Intelligence が提案するロボット基盤モデルアーキテクチャ π₀ の実装
この研究の概要は、Stable Diffusion 3 (Esser et al.) の影響を受けた単純化された Transfusion (Zhou et al.) であり、主にポリシー生成に拡散の代わりにフロー マッチングを採用することと、パラメータ (mmDIT からの共同注意)。これらは、事前トレーニングされたビジョン言語モデルである PaliGemma 2B の上に構築されています。
Einops は驚くべきパックとアンパックを実現し、さまざまなトークン セットを管理するためにここで広く使用されています
自己回帰的注意と双方向的注意を簡単に混合できるようにするためのフレックス アテンション
@Wonder1905 コードレビューと問題の特定
あなた?行動クローニングのための最新の SOTA アーキテクチャに貢献したいと考えている博士課程の学生でしょうか?
$ pip install pi-zero-pytorch import torch
from pi_zero_pytorch import π0
model = π0 (
dim = 512 ,
dim_action_input = 6 ,
dim_joint_state = 12 ,
num_tokens = 20_000
)
vision = torch . randn ( 1 , 1024 , 512 )
commands = torch . randint ( 0 , 20_000 , ( 1 , 1024 ))
joint_state = torch . randn ( 1 , 12 )
actions = torch . randn ( 1 , 32 , 6 )
loss , _ = model ( vision , commands , joint_state , actions )
loss . backward ()
# after much training
sampled_actions = model ( vision , commands , joint_state , trajectory_length = 32 ) # (1, 32, 6)プロジェクトのルートで次を実行します。
$ pip install ' .[test] ' # or `uv pip install '.[test]'`次に、テストをtests/test_pi_zero.pyに追加して実行します。
$ pytest tests/それでおしまい
@misc { Black2024 ,
author = { Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, Szymon Jakubczak, Tim Jones, Liyiming Ke, Sergey Levine, Adrian Li-Bell, Mohith Mothukuri, Suraj Nair, Karl Pertsch, Lucy Xiaoyang Shi, James Tanner, Quan Vuong, Anna Walling, Haohuan Wang, Ury Zhilinsky } ,
url = { https://www.physicalintelligence.company/download/pi0.pdf }
} @inproceedings { Zhou2024ValueRL ,
title = { Value Residual Learning For Alleviating Attention Concentration In Transformers } ,
author = { Zhanchao Zhou and Tianyi Wu and Zhiyun Jiang and Zhenzhong Lan } ,
year = { 2024 } ,
url = { https://api.semanticscholar.org/CorpusID:273532030 }
} @inproceedings { Darcet2023VisionTN ,
title = { Vision Transformers Need Registers } ,
author = { Timoth'ee Darcet and Maxime Oquab and Julien Mairal and Piotr Bojanowski } ,
year = { 2023 } ,
url = { https://api.semanticscholar.org/CorpusID:263134283 }
} @article { Li2024ImmiscibleDA ,
title = { Immiscible Diffusion: Accelerating Diffusion Training with Noise Assignment } ,
author = { Yiheng Li and Heyang Jiang and Akio Kodaira and Masayoshi Tomizuka and Kurt Keutzer and Chenfeng Xu } ,
journal = { ArXiv } ,
year = { 2024 } ,
volume = { abs/2406.12303 } ,
url = { https://api.semanticscholar.org/CorpusID:270562607 }
} @inproceedings { Sadat2024EliminatingOA ,
title = { Eliminating Oversaturation and Artifacts of High Guidance Scales in Diffusion Models } ,
author = { Seyedmorteza Sadat and Otmar Hilliges and Romann M. Weber } ,
year = { 2024 } ,
url = { https://api.semanticscholar.org/CorpusID:273098845 }
} @article { Bulatov2022RecurrentMT ,
title = { Recurrent Memory Transformer } ,
author = { Aydar Bulatov and Yuri Kuratov and Mikhail S. Burtsev } ,
journal = { ArXiv } ,
year = { 2022 } ,
volume = { abs/2207.06881 } ,
url = { https://api.semanticscholar.org/CorpusID:250526424 }
} @inproceedings { Bessonov2023RecurrentAT ,
title = { Recurrent Action Transformer with Memory } ,
author = { A. B. Bessonov and Alexey Staroverov and Huzhenyu Zhang and Alexey K. Kovalev and D. Yudin and Aleksandr I. Panov } ,
year = { 2023 } ,
url = { https://api.semanticscholar.org/CorpusID:259188030 }
} @article { Zhu2024HyperConnections ,
title = { Hyper-Connections } ,
author = { Defa Zhu and Hongzhi Huang and Zihao Huang and Yutao Zeng and Yunyao Mao and Banggu Wu and Qiyang Min and Xun Zhou } ,
journal = { ArXiv } ,
year = { 2024 } ,
volume = { abs/2409.19606 } ,
url = { https://api.semanticscholar.org/CorpusID:272987528 }
}親愛なるアリス


