Event Beacon Communication
1.0.0
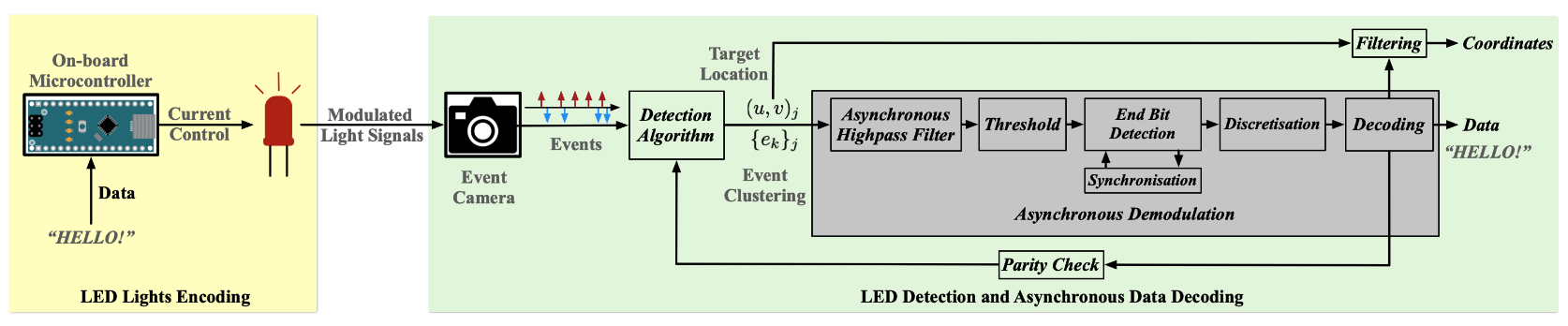
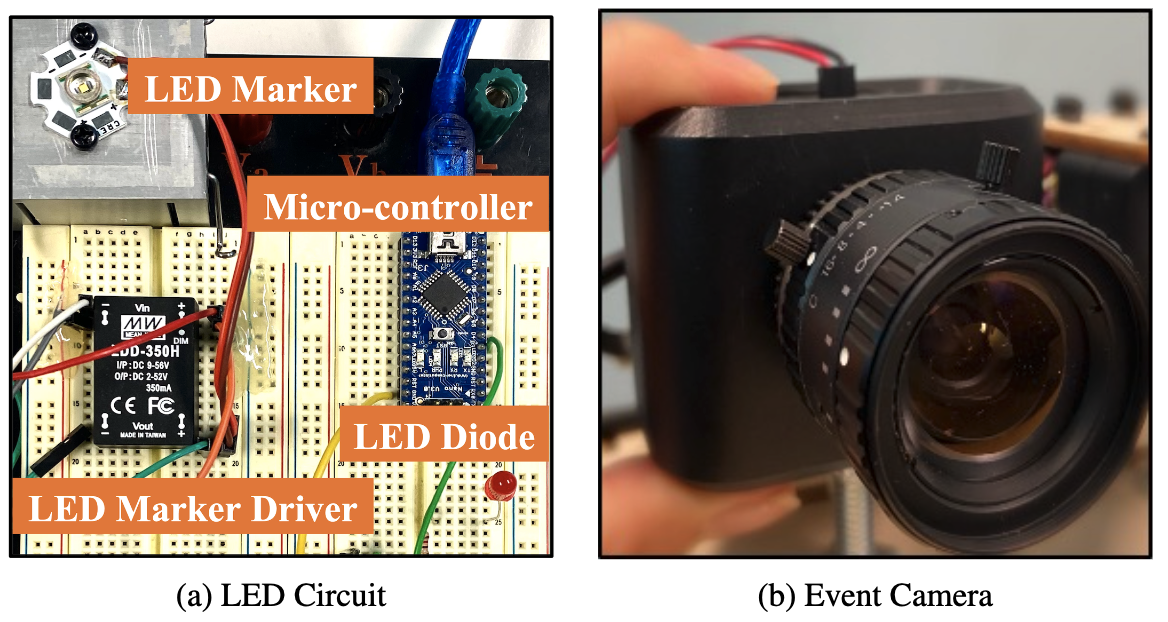
イベントカメラは、高い時間分解能、高ダイナミックレンジ、低レイテンシで画像強度の変化に応答するバイオ風の動的ビジョンセンサーです。これらのセンサーの特性は、分散ロボット工学のアプリケーションを備えたスマートビジュアルビーコン用のブロードキャストビジュアルコミュニケーションチャネルと協調して視覚的なターゲット追跡を可能にするのに理想的です。視覚ビーコンは、車のヘッドライト、モノのインターネット(IoT)LED、スマートビルディングライトなど、多くの実際のシナリオに既に存在するなどの光発光ダイオード(LED)の高周波変調によって構築できます。イベントカメラの特性の高い時間分解能により、クラシックフレームベースのカメラと比較して、はるかに高いデータレートで視覚信号をキャプチャできます。この論文では、LED変調とイベントカメラ復調アルゴリズムの両方を備えた新しいスマートビジュアルビーコンアーキテクチャを提案します。私たちは、プロトタイプをしたスマートビジュアルビーコン通信システムのLED伝送速度、通信距離、およびメッセージ伝送の精度との関係を定量的に評価します。提案された方法は、屋内環境で最大4 kbpsを達成し、100メートルの距離、500 bpsの伝送速度、完全な日光でのロスレストランスミッションを達成し、屋外環境での技術の可能性を示しています。
Ziwei Wang、Yonhon NG、Jack Henderson、Robert Mahony
この論文は、日本の京都で開催されたIEEE International Conference(IROS 2022)によって受け入れられました。
[会議用紙] [Arxivプレリント]
アルゴリズムまたはデータセットを使用または議論する場合は、次のように論文を引用してください。
@inproceedings {wang22iros、
著者= {Ziwei WangとYonhon NgとJack Henderson and Robert Mahony}、
title = {イベントカメラを使用した非同期光学通信を備えたスマートビジュアルビーコン}、
BookTitle = {"インテリジェントロボットとシステムに関する国際会議(IROS 2022)"}、
年= {2022}
}
decoder.m実行すると、./dataからイベントデータをロードします。デコードコードdecoder.mデコードされたメッセージと精度率(メッセージ精度とビット精度)を出力します。
ご質問や提案がある場合は、[email protected]にご連絡ください。


