usb ptt arduino nano every
1.0.0
Control Flex Radio 6xxx/8xxx Radio Push to Talk(PTT) Arduino nanoを使用してSmartCatとトーク(PTT)。
Flex Radio SmartCatは、スイッチ(つまり、Footswitch)に配線されたすべてのマイクロコントローラーすべてのArduino Nanoにインターフェイスします。
Arduino IDEでスケッチをロードします。
COMポートが作成されます。構成とテストの番号に注意してください。
Arduino nanoすべてのスケッチデバウンスタイマーはデフォルトセット(50ms)です。これは、必要に応じて調整できます。
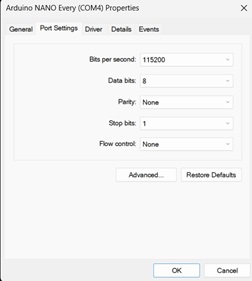
USBポート速度は115200に設定されています。デバイスマネージャーのUSBデバイスが115200に設定されていることを確認してください。
Arduino IDE Serial Montiorまたはターミナルエミュレータ(つまり、 Putty)を使用したテストをテストに使用できます。
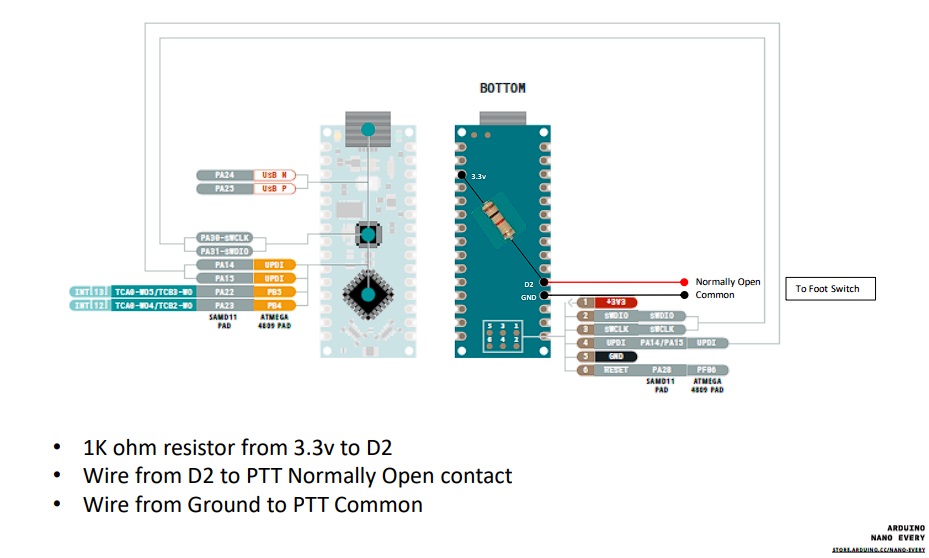
ピンD2とArduino Nanoの接地を使用して、フットスイッチに接続します。参照のためにすべてのピンアウトをArduino Nanoを使用してください。
1K抵抗器は、3.3VピンからD2ピンまでのプルアップ抵抗器として使用されます。
ピンD2をフットスイッチの通常開いた端子に接続します。
ナノの地面のピンを地面にワイヤーまたはスイッチの共通ターミナルに配線します。
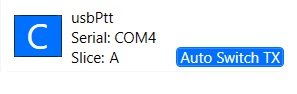
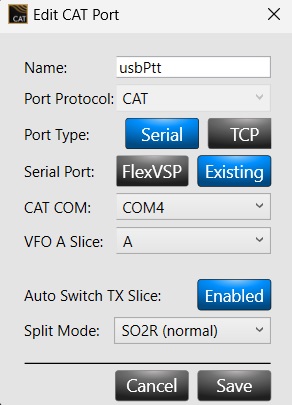
Arduino Nano Every Comポートを使用して、USBフットスイッチ用のSmartCatシリアル既存のポートを作成します。
{
「名前」:「usbptt」、
「プロトコル」:「猫」、
「ポートタイプ」:「シリアル」、
「シリアルポート」:「既存」、
「Cat Com」:「Arduino Nano Everyで作成された新しいポートを使用してください」
}
フットスイッチをコンピューターに接続し、ラジオでテストします。テストにはSmartCatのロギング関数を使用します。
MOXをオンにするためのCATコマンドの例:
2024-10-01 14:24:15.328 com4 [rcvd]:zz
2024-10-01 14:24:15.331 COM4 [RCVD]:TX1;
MoxをオフにするためのCATコマンドの例:
2024-10-01 14:24:15.707 com4 [rcvd]:zz
2024-10-01 14:24:15.709 com4 [rcvd]:tx0;
ZZTX0;
Linemaster Aquiline Foot Switchを埋め込んだArudino Nanoすべて



