ROScribe
v0.0.4
LLMSを使用してROSパッケージを作成します。
自然言語インターフェイスを使用してロボットプロジェクトを説明することで、Roscribeは初心者にROSを使用するスキルの障壁を排除し、熟練したエンジニアの時間と手間を節約します。 Roscribeは、大きな言語モデル(LLMS)の純粋なパワーと柔軟性を組み合わせて、ロボットデザインの詳細をキャプチャし、プロジェクト用のROSパッケージ全体を自動的に作成するための迅速な調整技術を組み合わせています。
Roscribeは、エージェントマルチステップアプローチを介してROSワークスペース全体を構築します。各ステップは、ロボットソフトウェア設計の1つの特定の側面に焦点を当てています。特に、Roscribeは次の手順を支援します。
あなたがROSを初めて使用する場合、Roscribeはあなたのロボット(ICS)メンターになりますか?️
あなたがベテランのROSユーザーである場合、RoscribeはあなたのROSパッケージの青写真を作成するのに役立ちますか?§
Roscribeは4つのエージェントで構成されています。以下のリストには、相互作用の順に示されている各エージェントの責任について説明します。
SpecAgent :プロジェクトの全体的なスケルトンを支援します。 ROSの用語では、プロジェクトのROSグラフを構築します。グラフの各部分は、オープンソースのリジザイリーからAIを生成または引き出すことができます。GenAgent :ROSグラフを考えると、このエージェントはPythonの各ROSノードのROSワークスペースとコードを生成します。または、ROSノードのオープンソースの実装をダウンロードできます。PackAgent :生成されたROS Workspaceの知識により、このエージェントはROSノードをもたらすROS起動ファイルを作成します。さらに、 package.xml 、 CMakeLists.txt 、およびREADME.mdファイルは、このエージェントによって生成されます。SupportAgent :これはカスタマーサポートエージェントです。これは、プロジェクトの実行中にエラーが発生したときにいつでも役立ちます。エージェントはすでにプロジェクトのレイアウトにアクセスしており、生成されたファイルを内部で読み取ることができます。次の図は、roscribeのアーキテクチャを示しています。 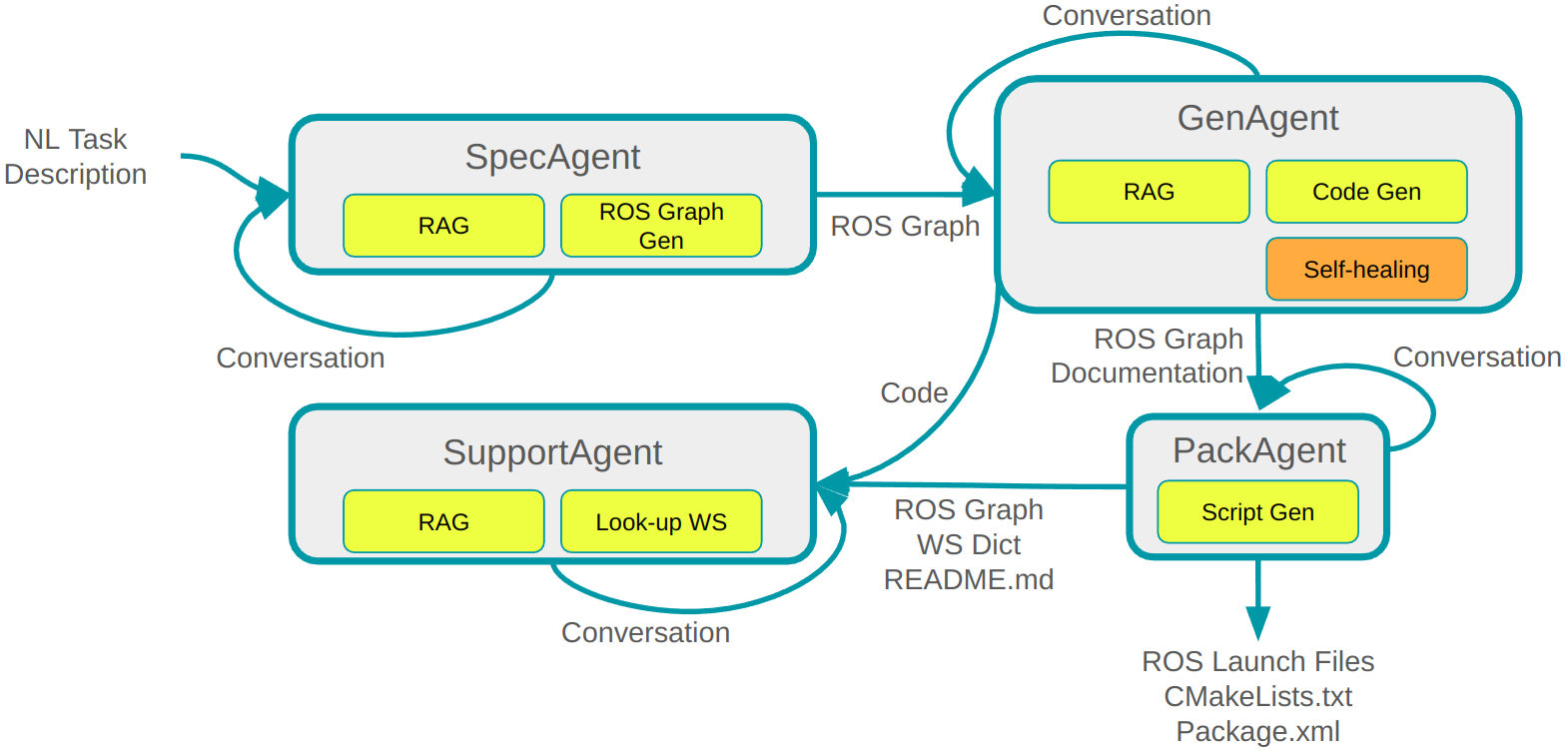
Wikiページをご覧ください。ロボットプロジェクトでroscribeのインストールと使用方法を学びましょう。
roscribeとLLMベースのロボットプラットフォームのアイデアの中を見る
2023年10月27日、UCSD ROSワークショップのプレゼンテーションスライド
UCSD ROSワークショッププレゼンテーションのビデオ録画2023年10月27日
コンサルティングや契約ジョブなどのビジネスに関するお問い合わせについては、[email protected]にお問い合わせください。
オープンソースプロジェクトとして、私たちはすべてのロボティクス愛好家にroscribeに貢献することをお勧めします。各リリース中に、新しい貢献者のリストを発表します。


