Downcodes 編集者の報告: ワシントン大学の研究チームは、SAMURAI と呼ばれる新しい視覚追跡モデルをリリースしました。これは SAM2 に基づいており、複雑なシーン、特に高速で移動する自己遮蔽物体を扱う際の視覚追跡の課題を克服することを目的としています。 SAMURAI は、一時的なモーション キューとモーション知覚メモリ選択メカニズムを導入することにより、オブジェクトのモーション予測機能とマスク選択の精度を大幅に向上させ、再トレーニングや微調整を行わずに堅牢で正確な追跡を実現します。強力なゼロショット パフォーマンスにより、特定のデータセットでトレーニングしなくても良好なパフォーマンスを発揮します。
SAM2 は、オブジェクトのセグメンテーション タスクでは優れたパフォーマンスを発揮しますが、視覚的な追跡ではいくつかの制限があります。たとえば、混雑したシーンでは、固定ウィンドウの記憶では選択されたメモリの品質が考慮されず、ビデオ シーケンス全体にエラーが伝播する可能性があります。
この問題を解決するために、研究チームはSAMURAIを提案しました。SAMURAIは、時間的動きキューと動き知覚記憶選択メカニズムを導入することで、物体の動きの予測能力とマスク選択の精度を大幅に向上させます。この革新により、SAMURAI は再トレーニングや微調整を必要とせずに、堅牢かつ正確な追跡を実現できます。
リアルタイム操作の観点から、SAMURAI は強力なゼロショット パフォーマンスを実証しました。これは、モデルが特定のデータセットでトレーニングされていなくても良好なパフォーマンスを発揮できることを意味します。
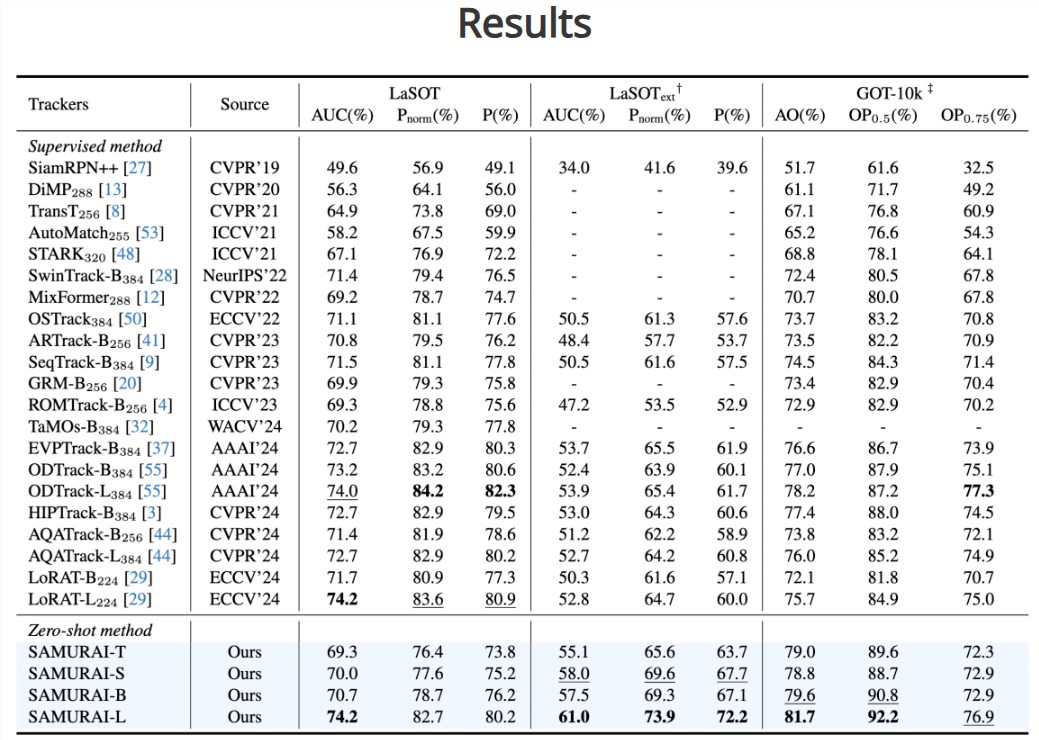
研究チームは評価を通じて、複数のベンチマーク データセットに対する SAMURAI の成功率と精度が大幅に向上していることを発見しました。 LaSOT-ext データセットでは、SAMURAI は 7.1% の AUC 増加を達成しましたが、GOT-10k データセットでは 3.5% の AO 増加を達成しました。さらに、完全に教師ありの手法と比較して、SAMURAI は LaSOT データセット上で同等の競争力を発揮し、複雑な追跡シナリオにおける堅牢性と幅広い応用可能性を実証しています。
研究チームは、SAMURAIの成功は、より複雑で動的な環境における視覚追跡技術の将来の応用の基礎を築くと述べた。彼らは、このイノベーションが視覚追跡分野の発展を促進し、リアルタイム アプリケーションのニーズを満たし、さまざまなスマート デバイスに強力な視覚認識機能を提供できることを期待しています。
プロジェクト入口: https://yangchris11.github.io/samurai/
SAMURAI モデルの登場により、視覚追跡テクノロジーに新たなブレークスルーがもたらされ、複雑なシーンにおけるその効率性と精度は目を見張るものがあります。将来的には自動運転やロボットビジョンなどの分野で広く活用され、人工知能技術のさらなる発展が期待されます。 Downcodes 編集者は、SAMURAI が将来さらに素晴らしい結果を達成するのを楽しみにしています。