私たちは人間と同じくらい賢いロボットに憧れてきましたが、ロボットの訓練は想像よりもはるかに困難です。従来のトレーニング方法は高価であるか、効果がありません。この問題を解決するために、スタンフォード大学の研究者たちは、デジタルいとこという独創的な解決策を考え出しました。 Downcodes の編集者は、この画期的なテクノロジーと、それがどのようにトレーニング コストを削減し、ロボットの堅牢性を高め、最終的にロボット技術を新たな高みに押し上げるのかについて、深く理解することができます。
私たちは、人間と同じくらい賢く、家事を手伝ってくれたり、会話をしたり、さらにはアイアンマンのジャービスのように全能であるロボットを持つことを常に夢見てきました。しかし、理想はとても豊かで、現実はとても痩せています。ロボットに何かを教えることは、ただ頭を撫でるだけではできません。それはガールフレンドに論理を教えるのと同じくらい難しく、たとえ多大な労力を費やしても効果的ではないかもしれません。
なぜでしょうか?現実の世界はあまりにも複雑で、事故や変化に満ちているからです。考えてみてください、ガールフレンドに単純な真実を教えるのに多くの時間を費やさなければなりません、ましてや人間の考えなしにロボットに教えるのはどうでしょうか?
従来のロボットのトレーニング方法は、コストがかかりすぎ、現実世界で繰り返し試行する必要があり、安全上の危険を引き起こす可能性があるか、効果が低すぎて、シミュレートされた環境で訓練されたロボットは、現実世界に到着するとすぐに盲目になってしまいます。同様の精神薄弱児。
この問題を解決するために、スタンフォード大学の研究者は、デジタルいとこという天才的なアイデアを思いつきました。
デジタルいとことは何ですか?
簡単に言うと、デジタルのいとこは現実世界のオブジェクトの仮想的な代役です。 本物に似た外観と同様の機能を備えた模倣性の高いデジタル モデルと考えることができますが、まったく同じである必要はありません。
たとえば、現実世界のキャビネットとそのデジタルのいとこは、同様のハンドルと引き出しのレイアウトを持つ必要がありますが、素材や詳細は異なる場合があります。 同様に、現実世界のキッチンとそのデジタル版の家具の配置は同様である必要がありますが、特定のモデルは若干異なる場合があります。
なぜこのデジタル版を導入するのでしょうか? それは次の 2 つの大きな利点があるからです。
コストの削減:デジタルいとこは、デジタルツインほど現実世界を正確に複製する必要がないため、よりシンプルかつ低コストで作成できます。
堅牢性の強化:現実のオブジェクトには複数のデジタルのいとこが存在する可能性があり、これらのいとこには微妙な違いがある可能性があります。これは、ロボットがさまざまな変化に対処する方法を学習できるように、より多様なトレーニング データを提供することに相当します。
デジタルいとこを自動的に生成するにはどうすればよいですか?
スタンフォード大学の研究者は、単一の RGB 画像からデジタルのいとこシーンを自動的に生成できるACDCと呼ばれるシステムを開発しました。 このシステムは、怠け者にとって朗報です。写真を撮るだけで、ロボットがそこで遊べる仮想練習場を生成できます。
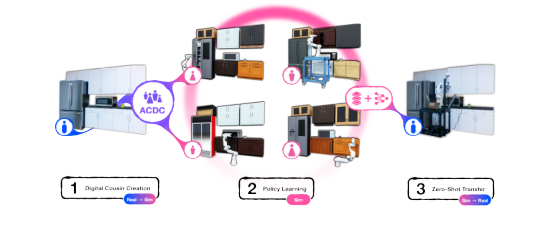
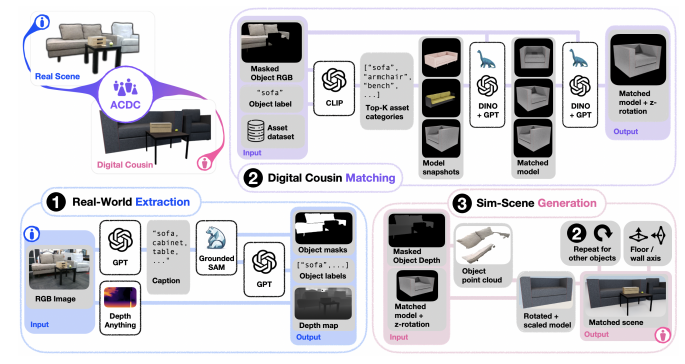
ACDCシステムのワークフローは大きく3つのステップに分かれます。
情報の抽出:入力 RGB 画像からオブジェクトのマスク、深度情報などを抽出します。
いとこのマッチング:抽出された情報に基づいて、現実のオブジェクトに最も類似したデジタル モデルをデータベースから見つけ、オブジェクトのカテゴリと特性に従ってモデルのサイズと方向を調整します。
シーンの生成:一致したデジタル モデルを組み合わせて完全な仮想シーンを生成し、物理的な調整を行ってシーンの安定性と合理性を確保します。

デジタルいとこは本当に機能するのでしょうか?
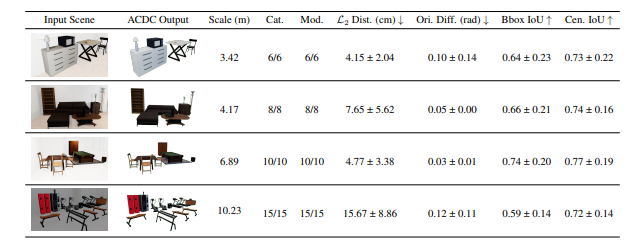
スタンフォード大学の研究者らは一連の実験を実施し、デジタルいとこで訓練されたロボットの方がパフォーマンスが優れていることを示しました。
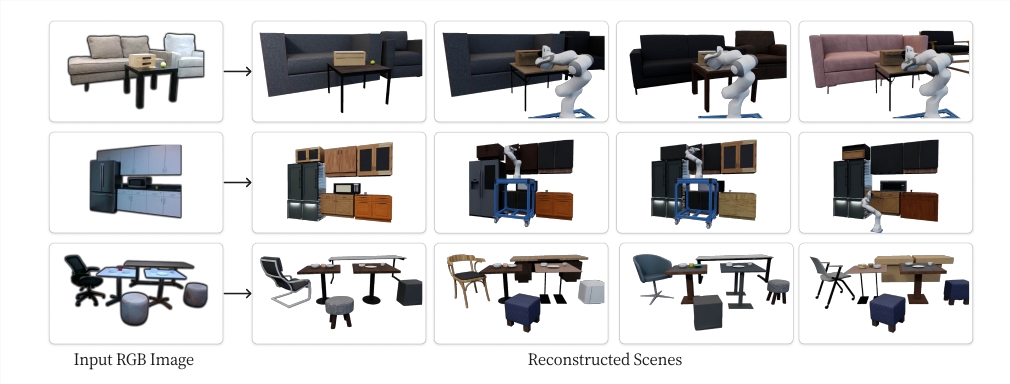
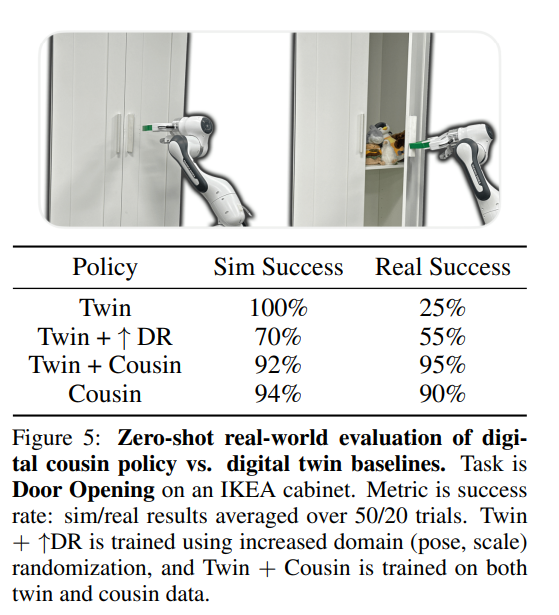
シミュレートされた環境:シミュレートされた環境では、デジタルいとこで訓練されたロボットは、ドアを開ける、引き出しを開ける、ボウルを置くなどのタスクを完了する際の成功率が高く、さまざまなモデルの家具への適応性が高くなります。 対照的に、デジタルツインで訓練されたロボットは、見たことのない家具に出会うと愚かな行動をする傾向があります。
現実世界:現実世界では、デジタルいとこで訓練されたロボットは、追加の微調整なしで現実世界のシナリオに直接適用できます。 デジタルツインで訓練されたロボットは、現実世界の違いに適応するために追加の調整が必要です。
デジタルいとこテクノロジーの出現により、ロボット学習の新たな扉が開かれました。 未来のロボットは、より賢く、より柔軟になり、複雑で変化し続ける現実世界にうまく適応できるようになります。
もちろん、このテクノロジーには現時点ではまだいくつかの制限があります。たとえば、データベース内のモデルの数と種類が十分ではなく、いくつかの特殊な状況の処理が十分ではありません。 しかし、テクノロジーの進歩とデータの蓄積により、これらの問題は徐々に解決されるでしょう。
全体として、デジタルいとこテクノロジーには明るい未来があり、ロボット工学を次のレベルに押し上げるでしょう。 近い将来、実際に人間と同じくらい賢いロボットを仲間にできるようになるかもしれません。
プロジェクトアドレス: https://digital-cousins.github.io/
論文アドレス: https://arxiv.org/pdf/2410.07408
スタンフォード大学が提案した「デジタルいとこ」テクノロジーは、ロボットのトレーニングに新しい考え方を提供し、コストを削減し、効率を向上させ、将来のよりインテリジェントで柔軟なロボットのための強固な基盤を築きます。私は、技術の継続的な発展に伴い、「デジタルのいとこ」がロボット技術のさらなる進歩を促進し、最終的には知能ロボットとの調和のとれた共存という私たちの夢を実現すると信じています。