3DObjectTracking
1.0.0
Rastrear objetos e estruturas cinemáticas no espaço 3D e determinar suas poses e configurações é uma tarefa essencial em visão computacional. Sua aplicação vai desde a realidade aumentada até a percepção robótica. Dados quadros de imagens consecutivos, bem como malhas 3D e informações cinemáticas, o objetivo é estimar de forma robusta a rotação e translação de todos os corpos em relação a uma câmera. Embora o problema tenha sido exaustivamente estudado, ainda existem muitos desafios, como oclusões parciais, alterações de aparência, desfoque de movimento, confusão de fundo, ambiguidade de objetos e requisitos de tempo real.
Neste repositório, publicaremos continuamente algoritmos e códigos de nossas pesquisas em andamento sobre rastreamento de objetos 3D. As pastas dos diferentes algoritmos incluem tudo o que é necessário para reproduzir os resultados apresentados em nossos artigos. Observe que o código de cada novo artigo também inclui uma versão atualizada do trabalho anterior. Se você quiser usar nosso rastreador em seu próprio projeto ou aplicação, use o código da última publicação. Atualmente, a versão mais recente do nosso código pode ser encontrada na pasta M3T .

Uma estrutura de rastreamento multicorpo – de objetos rígidos a estruturas cinemáticas

Combinando aparência visual e geometria para rastreamento de objetos 6DoF multimodalidade
Apresentação CVPR 2022

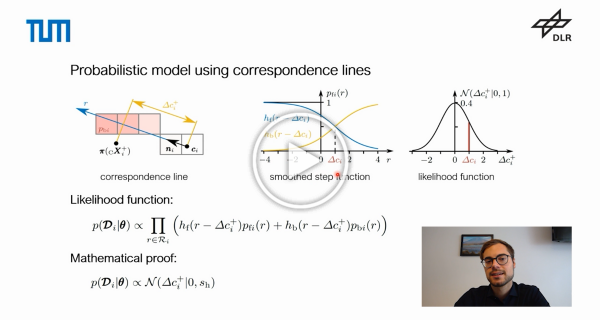
Geometria correspondente iterativa
Apresentação Oral ACCV 2020
Uma abordagem gaussiana esparsa para rastreamento de objetos 6DoF baseado em região
Uma abordagem gaussiana esparsa para rastreamento de objetos 6DoF baseado em região


