T2M GPT
1.0.0
Implementação Pytorch do artigo "T2M-GPT: Gerando Movimento Humano a partir de Descrições Textuais com Representações Discretas"
[Página do projeto] [Papel] [Demonstração do notebook] [HuggingFace] [Demonstração do espaço] [T2M-GPT +]

Se nosso projeto for útil para sua pesquisa, considere citar:
@inproceedings{zhang2023generating,
title={T2M-GPT: Generating Human Motion from Textual Descriptions with Discrete Representations},
author={Zhang, Jianrong and Zhang, Yangsong and Cun, Xiaodong and Huang, Shaoli and Zhang, Yong and Zhao, Hongwei and Lu, Hongtao and Shen, Xi},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2023},
}
| Texto: um homem dá um passo à frente e faz parada de mão. | ||||
|---|---|---|---|---|
| GT | T2M | MDM | Movimento Difuso | Nosso |
 |  |  |  |  |
| Texto: Um homem se levanta do chão, anda em círculo e senta-se novamente no chão. | ||||
| GT | T2M | MDM | Movimento Difuso | Nosso |
 |  |  |  |  |
Nosso modelo pode ser aprendido em uma única GPU V100-32G
conda env create -f environment.yml
conda activate T2M-GPTO código foi testado em Python 3.8 e PyTorch 1.8.1.
bash dataset/prepare/download_glove.shEstamos usando dois conjuntos de dados de linguagem de movimento humano 3D: HumanML3D e KIT-ML. Para ambos os conjuntos de dados, você pode encontrar os detalhes, bem como o link para download [aqui].
Tomemos HumanML3D como exemplo, o diretório do arquivo deve ficar assim:
./dataset/HumanML3D/
├── new_joint_vecs/
├── texts/
├── Mean.npy # same as in [HumanML3D](https://github.com/EricGuo5513/HumanML3D)
├── Std.npy # same as in [HumanML3D](https://github.com/EricGuo5513/HumanML3D)
├── train.txt
├── val.txt
├── test.txt
├── train_val.txt
└── all.txt
Usamos os mesmos extratores fornecidos por t2m para avaliar nossos movimentos gerados. Baixe os extratores.
bash dataset/prepare/download_extractor.shOs arquivos do modelo pré-treinado serão armazenados na pasta 'pré-treinado':
bash dataset/prepare/download_model.shSe quiser renderizar o movimento gerado, você precisa instalar:
sudo sh dataset/prepare/download_smpl.sh
conda install -c menpo osmesa
conda install h5py
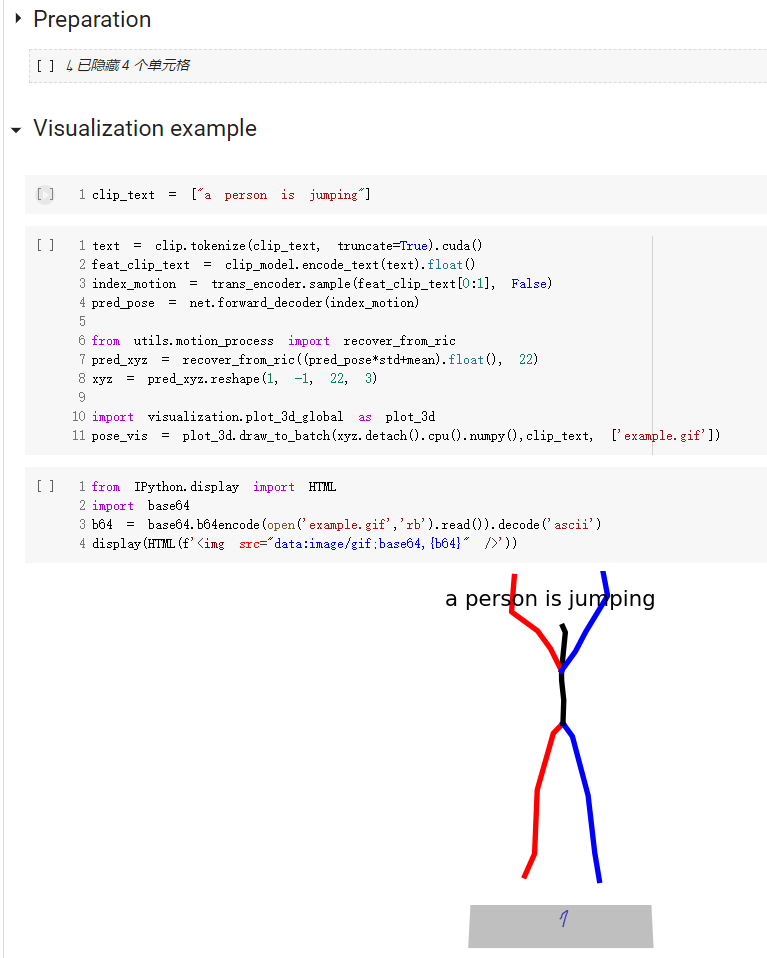
conda install -c conda-forge shapely pyrender trimesh mapbox_earcutUm guia de início rápido sobre como usar nosso código está disponível em demo.ipynb
Observe que, para o conjunto de dados do kit, basta definir '--dataname kit'.
Os resultados são salvos na pasta de saída.
python3 train_vq.py
--batch-size 256
--lr 2e-4
--total-iter 300000
--lr-scheduler 200000
--nb-code 512
--down-t 2
--depth 3
--dilation-growth-rate 3
--out-dir output
--dataname t2m
--vq-act relu
--quantizer ema_reset
--loss-vel 0.5
--recons-loss l1_smooth
--exp-name VQVAEOs resultados são salvos na pasta de saída.
python3 train_t2m_trans.py
--exp-name GPT
--batch-size 128
--num-layers 9
--embed-dim-gpt 1024
--nb-code 512
--n-head-gpt 16
--block-size 51
--ff-rate 4
--drop-out-rate 0.1
--resume-pth output/VQVAE/net_last.pth
--vq-name VQVAE
--out-dir output
--total-iter 300000
--lr-scheduler 150000
--lr 0.0001
--dataname t2m
--down-t 2
--depth 3
--quantizer ema_reset
--eval-iter 10000
--pkeep 0.5
--dilation-growth-rate 3
--vq-act relupython3 VQ_eval.py
--batch-size 256
--lr 2e-4
--total-iter 300000
--lr-scheduler 200000
--nb-code 512
--down-t 2
--depth 3
--dilation-growth-rate 3
--out-dir output
--dataname t2m
--vq-act relu
--quantizer ema_reset
--loss-vel 0.5
--recons-loss l1_smooth
--exp-name TEST_VQVAE
--resume-pth output/VQVAE/net_last.pthSeguindo a configuração de avaliação de texto para movimento, avaliamos nosso modelo 20 vezes e reportamos o resultado médio. Devido à parte de multimodalidade onde deveríamos gerar 30 moções a partir de um mesmo texto, a avaliação demora muito.
python3 GPT_eval_multi.py
--exp-name TEST_GPT
--batch-size 128
--num-layers 9
--embed-dim-gpt 1024
--nb-code 512
--n-head-gpt 16
--block-size 51
--ff-rate 4
--drop-out-rate 0.1
--resume-pth output/VQVAE/net_last.pth
--vq-name VQVAE
--out-dir output
--total-iter 300000
--lr-scheduler 150000
--lr 0.0001
--dataname t2m
--down-t 2
--depth 3
--quantizer ema_reset
--eval-iter 10000
--pkeep 0.5
--dilation-growth-rate 3
--vq-act relu
--resume-trans output/GPT/net_best_fid.pthVocê deve inserir o endereço da pasta npy e os nomes dos movimentos. Aqui está um exemplo:
python3 render_final.py --filedir output/TEST_GPT/ --motion-list 000019 005485Agradecemos ajuda de:


