Navigating Ryze Tello Drones With MATLAB App
v1.1.1
Para controlar interativamente um Ryze® Tello Drone conectado ao seu computador executando MATLAB®, MathWorks® fornece um aplicativo MATLAB - Ryze Tello Navigator. Este aplicativo ajuda você a:
Veja todos os drones Ryze Tello conectados à rede WiFi do computador.
Realizar decolagem/pouso de um drone.
Controle a navegação do drone usando o teclado ou os botões de controle de navegação do aplicativo.
Visualize o feed da câmera e capture imagens.
Grave o feed de vídeo do drone na variável do espaço de trabalho MATLAB.
Gere o script MATLAB para a navegação concluída.
Instale o pacote de suporte MATLAB e MATLAB para drones Ryze Tello
Execute a instalação e configuração inicial e conecte-se a um ou mais drones Ryze Tello.
Baixe ou clone este repositório.
Navegue até a pasta do repositório local no MATLAB
Execute os seguintes comandos na janela de comando do MATLAB:
adicionarcaminho(senha);
salvar caminho;
Inicie o aplicativo executando o comando ryzeTelloNavigator .
Requer MATLAB versão R2022a ou mais recente
Pacote de suporte MATLAB® para drones Ryze Tello®
Certifique-se de que o drone que aparece na lista de dispositivos é aquele que você gostaria de controlar usando o aplicativo. Se o drone não estiver listado, execute a Instalação e Configuração novamente.
| Etapa | Ação | Resultado |
|---|---|---|
| 1 |  Clique no nome do drone na lista de dispositivos e clique em Verificação pré-voo na seção Navegação na parte superior. Clique no nome do drone na lista de dispositivos e clique em Verificação pré-voo na seção Navegação na parte superior. | Uma nova caixa de diálogo, Running Pre-flight Checklist, aparece. Todos os outros controles do aplicativo ficam desativados enquanto a verificação pré-voo está em andamento. Se houver erros, a caixa de diálogo fornecerá links para as etapas de solução de problemas necessárias |
| 2 | Depois de verificar se todas as verificações pré-voo foram concluídas com êxito, clique em OK. |  A indicação Pre-Flight Check Completed aparece no lado direito do aplicativo. Todos os outros controles também estão habilitados. A indicação Pre-Flight Check Completed aparece no lado direito do aplicativo. Todos os outros controles também estão habilitados. |
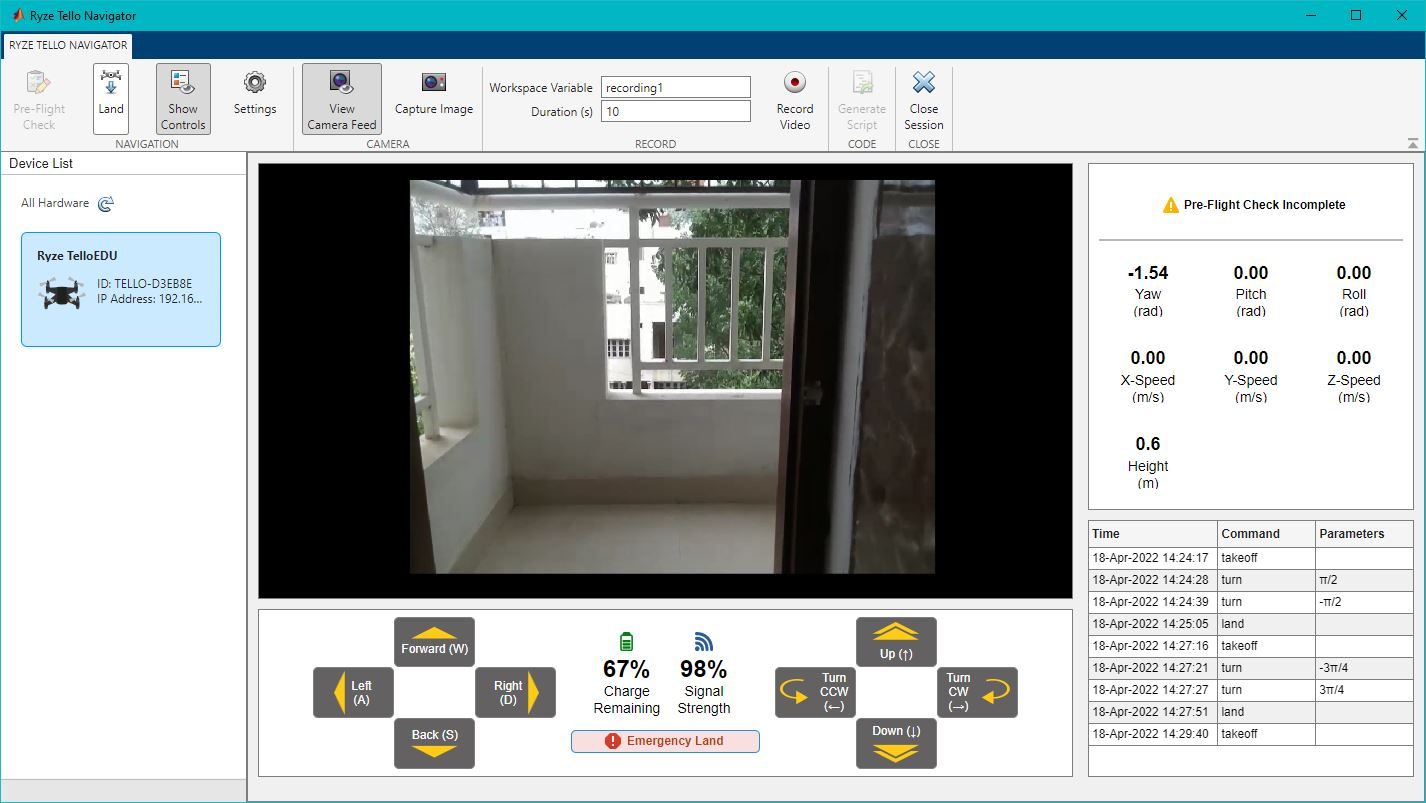
Ryze Tello Navigator ajuda você a realizar decolagem/pouso e controlar interativamente o drone Ryze Tello.
Nota : Antes de iniciar a decolagem do drone, considere as precauções gerais de segurança. Se você sentir qualquer dano que possa ocorrer ao drone e ao entorno durante a decolagem ou durante a execução do controle manual de navegação (conforme mencionado nas etapas subsequentes), você pode clicar em Pouso de Emergência . Clicar neste botão aciona um desligamento de emergência dos motores do drone, fazendo com que ele caia da altura atual (para drones Tello EDU) ou força o drone a pousar verticalmente de sua posição atual (para drones Tello).
| Etapa | Ação | Resultado |
|---|---|---|
| 1 |  Verifique se a carga da bateria e a intensidade do sinal do drone, conforme exibido no aplicativo, são suficientes para realizar a decolagem e o controle. Verifique se a carga da bateria e a intensidade do sinal do drone, conforme exibido no aplicativo, são suficientes para realizar a decolagem e o controle. | |
| 2 |  Clique em Visualizar feed da câmera para verificar se o feed da câmera do drone está funcionando corretamente. Clique em Visualizar feed da câmera para verificar se o feed da câmera do drone está funcionando corretamente. | O aplicativo exibe a visualização, vista pela câmera do drone antes da decolagem. Mais tarde, quando o drone se mover, a visualização será atualizada com a transmissão ao vivo da câmera. |
| 3 |  Pressione a barra de espaço no teclado ou clique em Take Off que aparece na seção Navegação na área da barra de ferramentas. Pressione a barra de espaço no teclado ou clique em Take Off que aparece na seção Navegação na área da barra de ferramentas. | Os motores do drone são iniciados e o drone decola para uma determinada altitude e paira nessa posição. O botão Take Off é substituído pelo botão Land . |
| 4 | Execute a navegação manual do drone a partir do aplicativo clicando nos respectivos ícones do aplicativo ou usando o teclado. | O drone se move de acordo com o controle de navegação que você acionou. O feed da câmera (visualização), se estiver habilitado, também é atualizado. Para aumentar a área da janela de visualização conforme vista no aplicativo, você pode ocultar o painel que mostra botões para controle manual. Clique em Mostrar controles para desativar o painel. Você ainda pode usar as teclas do teclado para controlar o drone. |
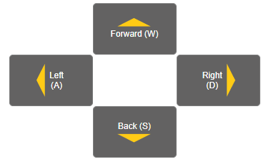
Chaves WASD:
W – Seguir em frente
A – Mover para a esquerda
S – Mover para trás
D – Mover para a direita
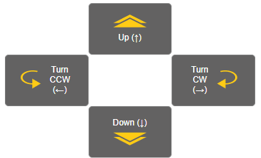
Teclas de seta:
▲ – Mova o drone para cima
▼ – Mova o drone para baixo
◄ – Gire o drone no sentido anti-horário
► – Gire o drone no sentido horário
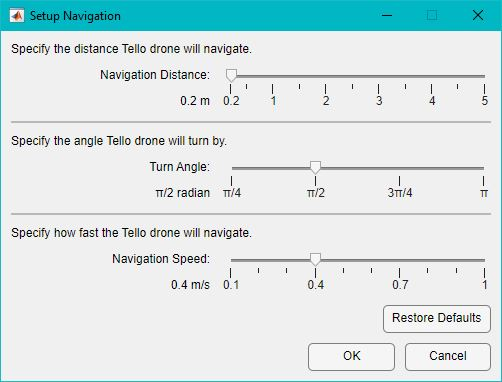
Você pode alterar as configurações de navegação que o drone usa cada vez que aciona o movimento ao longo de uma direção específica. Clique em Configurações para abrir a caixa de diálogo Configurar navegação e especifique os valores de distância, ângulo e velocidade usando os controles deslizantes. Se desejar restaurar os valores padrão (Distância de navegação: 0,2 m, Ângulo de giro: π/2, Velocidade de navegação: 0,4 m/s), clique em Restaurar padrões na caixa de diálogo.

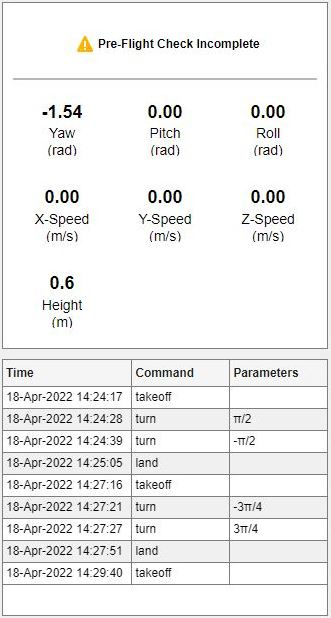
O aplicativo também exibe os dados de navegação ao vivo (capturados pelos sensores do drone) e também o registro dos comandos que você acionou usando os botões de navegação ou teclas do teclado. Esta informação aparece no painel lateral direito.
Ryze Tello Navigator ajuda você a capturar imagens e gravar vídeos vistos através da câmera FPV do drone Ryze Tello.
| Etapa | Ação | Resultado |
|---|---|---|
| 1 |  Capture uma imagem de cada vez. Capture uma imagem de cada vez. | A imagem é armazenada como uma variável de espaço de trabalho. |
| 2 |  Defina a Variável do Espaço de Trabalho e a Duração para gravar o vídeo e clique em Gravar Vídeo. Defina a Variável do Espaço de Trabalho e a Duração para gravar o vídeo e clique em Gravar Vídeo. | O vídeo da câmera do drone começa a ser gravado durante o período especificado. Clique em Parar para interromper a gravação a qualquer momento durante a gravação e o vídeo será salvo automaticamente na área de trabalho como uma matriz de imagens. |
Ryze Tello Navigator ajuda você a gerar um script do Live Editor da navegação que você realizou. Você pode usar este script para definir a configuração inicial e a trajetória de voo do drone e, em seguida, adicionar algoritmos personalizados para executar fluxos de trabalho adicionais.

Para fazer isso, clique em Gerar Script depois de pousar o drone com sucesso.
| Avisos | Problema e ação recomendada |
|---|---|
| Nível de bateria baixo | O aplicativo passa a exibir avisos caso a indicação Carga Restante mostre um valor abaixo de 20% e o drone esteja voando ou pairando. Se o nível da bateria cair abaixo de 10%, o drone pousa automaticamente de sua posição atual. Para evitar isso, certifique-se de pousar o drone usando o botão Land no aplicativo e, em seguida, substituir a bateria do drone. |
| Baixa intensidade do sinal | O aplicativo exibe constantemente os valores de intensidade do sinal enquanto o drone está voando. Recomenda-se que você tome as medidas necessárias se a intensidade do sinal estiver abaixo de 20% para evitar perder o controle do drone. Se a conexão com o drone for perdida, uma caixa de diálogo aparecerá mostrando a opção de reconectar-se ao drone. Se ainda falhar, uma mensagem de erro será exibida. |
A licença está disponível no arquivo LICENSE.TXT neste repositório GitHub.
Central MATLAB
Direitos autorais 2022 The MathWorks, Inc.


