glom pytorch
0.0.14
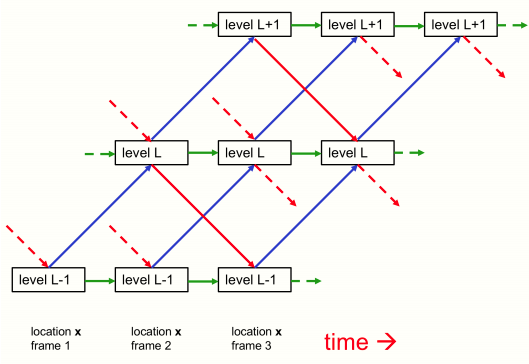
Uma implementação de Glom, a nova ideia de Geoffrey Hinton que integra conceitos de campos neurais, processamento de cima para baixo e de baixo para cima e atenção (consenso entre colunas) para aprender hierarquias parte-todo emergentes a partir de dados.
O vídeo de Yannic Kilcher foi fundamental para me ajudar a entender este artigo
$ pip install glom-pytorch import torch
from glom_pytorch import Glom
model = Glom (
dim = 512 , # dimension
levels = 6 , # number of levels
image_size = 224 , # image size
patch_size = 14 # patch size
)
img = torch . randn ( 1 , 3 , 224 , 224 )
levels = model ( img , iters = 12 ) # (1, 256, 6, 512) - (batch - patches - levels - dimension) Passe o argumento da palavra-chave return_all = True adiante e você receberá todos os estados de coluna e nível por iteração (incluindo o estado inicial, número de iterações + 1). Você pode então usar isso para anexar quaisquer perdas a qualquer nível de saída em qualquer intervalo de tempo.
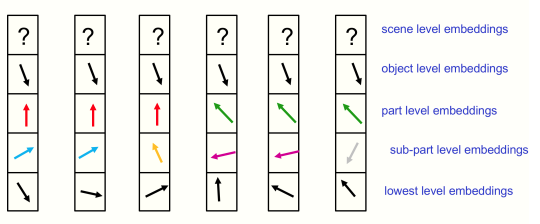
Ele também fornece acesso a todos os dados de nível entre iterações para clustering, a partir dos quais é possível inspecionar as ilhas teorizadas no artigo.
import torch
from glom_pytorch import Glom
model = Glom (
dim = 512 , # dimension
levels = 6 , # number of levels
image_size = 224 , # image size
patch_size = 14 # patch size
)
img = torch . randn ( 1 , 3 , 224 , 224 )
all_levels = model ( img , iters = 12 , return_all = True ) # (13, 1, 256, 6, 512) - (time, batch, patches, levels, dimension)
# get the top level outputs after iteration 6
top_level_output = all_levels [ 7 , :, :, - 1 ] # (1, 256, 512) - (batch, patches, dimension)Eliminando o ruído da aprendizagem auto-supervisionada para encorajar a emergência, conforme descrito por Hinton
import torch
import torch . nn . functional as F
from torch import nn
from einops . layers . torch import Rearrange
from glom_pytorch import Glom
model = Glom (
dim = 512 , # dimension
levels = 6 , # number of levels
image_size = 224 , # image size
patch_size = 14 # patch size
)
img = torch . randn ( 1 , 3 , 224 , 224 )
noised_img = img + torch . randn_like ( img )
all_levels = model ( noised_img , return_all = True )
patches_to_images = nn . Sequential (
nn . Linear ( 512 , 14 * 14 * 3 ),
Rearrange ( 'b (h w) (p1 p2 c) -> b c (h p1) (w p2)' , p1 = 14 , p2 = 14 , h = ( 224 // 14 ))
)
top_level = all_levels [ 7 , :, :, - 1 ] # get the top level embeddings after iteration 6
recon_img = patches_to_images ( top_level )
# do self-supervised learning by denoising
loss = F . mse_loss ( img , recon_img )
loss . backward ()Você pode passar o estado da coluna e dos níveis de volta ao modelo para continuar de onde parou (talvez se estiver processando quadros consecutivos de um vídeo lento, conforme mencionado no artigo)
import torch
from glom_pytorch import Glom
model = Glom (
dim = 512 ,
levels = 6 ,
image_size = 224 ,
patch_size = 14
)
img1 = torch . randn ( 1 , 3 , 224 , 224 )
img2 = torch . randn ( 1 , 3 , 224 , 224 )
img3 = torch . randn ( 1 , 3 , 224 , 224 )
levels1 = model ( img1 , iters = 12 ) # image 1 for 12 iterations
levels2 = model ( img2 , levels = levels1 , iters = 10 ) # image 2 for 10 iteratoins
levels3 = model ( img3 , levels = levels2 , iters = 6 ) # image 3 for 6 iterationsObrigado a Cfoster0 por revisar o código
@misc { hinton2021represent ,
title = { How to represent part-whole hierarchies in a neural network } ,
author = { Geoffrey Hinton } ,
year = { 2021 } ,
eprint = { 2102.12627 } ,
archivePrefix = { arXiv } ,
primaryClass = { cs.CV }
}

