jetson nano baseboard
v1.4.6
Copyright (C) 2020-2024 Antmicro

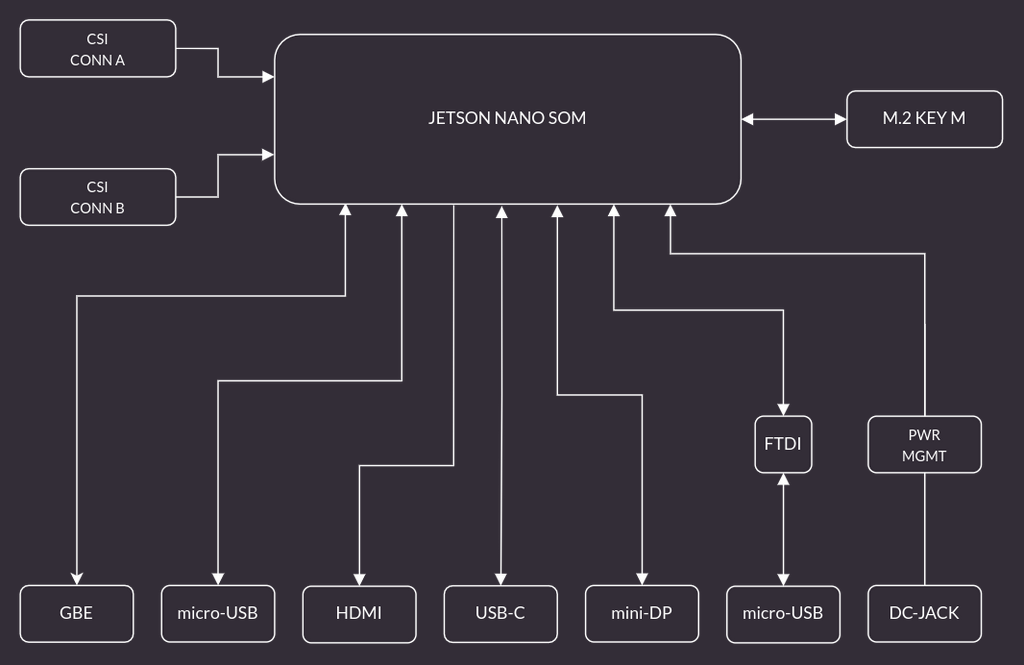
Este projeto contém arquivos de design de hardware aberto para um rodapé que suporta o NVIDIA Jetson Nano, Xavier NX e TX2 NX SOMS. Foi criado pela Antmicro, uma empresa de engenharia de hardware, software e IA e parceiro de engenharia de IA e o Jetson EcoSystem Partner da Nvidia. A placa pode ser interfigurada com dispositivos de vídeo MIPI CSI-2 através de um conector de cabo plano flexível (FFC) unificado, suportando até 4 sensores em uma configuração de 2 pistas ou 3 sensores em uma configuração de 4 faixas. Consulte o Guia de Design de Produto para o SOM relevante para obter mais detalhes sobre os mapeamentos CSI Lane suportados. Você encontrará os recursos relacionados ao SOM no Jetson Download Center da Nvidia.
O rodapé, suas variantes personalizadas projetadas pela Antmicro por especificação do cliente e acessórios essenciais podem ser adquiridos de componentes de robô capazes.
Os arquivos de design para este projeto a partir da Rev. 1.5 são fornecidos e mantidos no KICAD. As revisões mais antigas do conselho foram preparadas no Altium Designer e são mantidas em um ramo separado.
O diretório principal contém os arquivos de design da Kicad, licença e leitura. Os arquivos restantes são armazenados nos seguintes diretórios:
img - contém gráficos para este readmedoc - contém esquemas gerados e outra documentaçãolinux-patches - contém patches que adicionam suporte à câmera para módulos da câmera da Allied Vision (consulte a seção BSP abaixo) A placa pode ser produzida e montada usando os arquivos de design fornecidos. Dê uma olhada nas camadas mecânicas para obter mais informações sobre a pilha de PCB recomendada para fabricação. A placa pode ser alimentada por uma tensão na faixa de 6-36VDC. Recomenda -se usar uma oferta de 12V 2A DC para alimentar a placa. A placa possui um sequenciador de energia integrado que inicia o módulo automaticamente logo após a aplicação da fonte de alimentação.
As interfaces de E / S do rodapé são suportadas no Linux padrão para BSPs Tegra (L4T) fornecido pela NVIDIA para Jetson Nano / Xavier NX / TX2 NX. O BSP deve funcionar com o rodapé do Jetson de código aberto. No entanto, para usar o rodapé com várias câmeras e outros acessórios, pode ser necessário fazer modificações. Se você planeja usar a placa com sensores de imagem Allied Vision Alvium, existe um diretório linux-patches , que contém arquivos de patch que adicionam suporte para as câmeras de visão aliada para este rodapé com o módulo Jetson Nano NX. Os patches são nomeados com a liberação do L4T e podem ser aplicados aos ramos correspondentes do repositório Linux divulgado pela Allied Vision. Os serviços da Antmicro envolvem o desenvolvimento do BSP para que você possa nos contratar para fazer as modificações necessárias para você.
Você pode usar o conector da interface USB OTG para fazer upload de uma imagem BSP para um SOM inserido no rodapé.
A maioria das mensagens de depuração é fornecida através do console serial. A placa inclui um chip FTDI, fornecendo a interface UART para o PC host. Consulte as folhas esquemáticas para obter mais detalhes. O canal UART de depuração padrão é acessível através do /dev/ttyUSB0 (assumindo que não haja outras unidades FTDI conectadas ao seu PC). O Baudrate padrão para a conexão de depuração em série é 115200 baud com uma transmissão de 8 bits, 1 bit de parada e sem controle de fluxo.
A revisão mais recente da placa (1.5.x) inclui os arquivos de design convertidos em kicad. O nascimento foi alterado para que o conselho possa ser produzido, apesar da situação global de escassez de chips. Revisão 1.5.x Altera o multiplexador i2C (PCA9548 -> PCA9547) usado para lidar com as câmeras e acessórios de vídeo. Pode ser necessário ajustar as entradas do DeviceTree para acessórios de vídeo para fazê -los trabalhar com o novo chip multiplexador I2C.
Este projeto está licenciado sob a licença Apache-2.0.


