3DObjectTracking
1.0.0
Отслеживание объектов и кинематических структур в трехмерном пространстве, определение их положения и конфигурации — важная задача компьютерного зрения. Его применение варьируется от дополненной реальности до роботизированного восприятия. Учитывая последовательные кадры изображения, а также трехмерные сетки и кинематическую информацию, цель состоит в том, чтобы надежно оценить вращение и перемещение всех тел относительно камеры. Хотя проблема тщательно изучена, многие проблемы, такие как частичная окклюзия, изменение внешнего вида, размытие при движении, помехи на заднем плане, неоднозначность объектов и требования реального времени, все еще существуют.
В этом репозитории мы будем постоянно публиковать алгоритмы и код наших текущих исследований по отслеживанию 3D-объектов. В папках различных алгоритмов есть все необходимое для воспроизведения результатов, представленных в наших статьях. Обратите внимание, что код каждой новой статьи также включает обновленную версию предыдущей работы. Если вы хотите использовать наш трекер в своем проекте или приложении, используйте код из последней публикации. На данный момент последнюю версию нашего кода можно найти в папке M3T .

Система отслеживания нескольких тел — от твердых объектов к кинематическим конструкциям

Объединение визуального вида и геометрии для мультимодального отслеживания объектов с 6 степенями свободы
Презентация ЦВПР 2022

Итеративная соответствующая геометрия
Устная презентация ACCV 2020
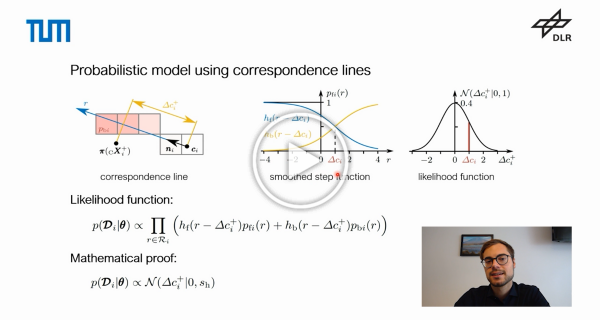
Разреженный гауссов подход к отслеживанию объектов 6DoF на основе регионов
Разреженный гауссов подход к отслеживанию объектов 6DoF на основе регионов


