tacto
1.0.0
![]()
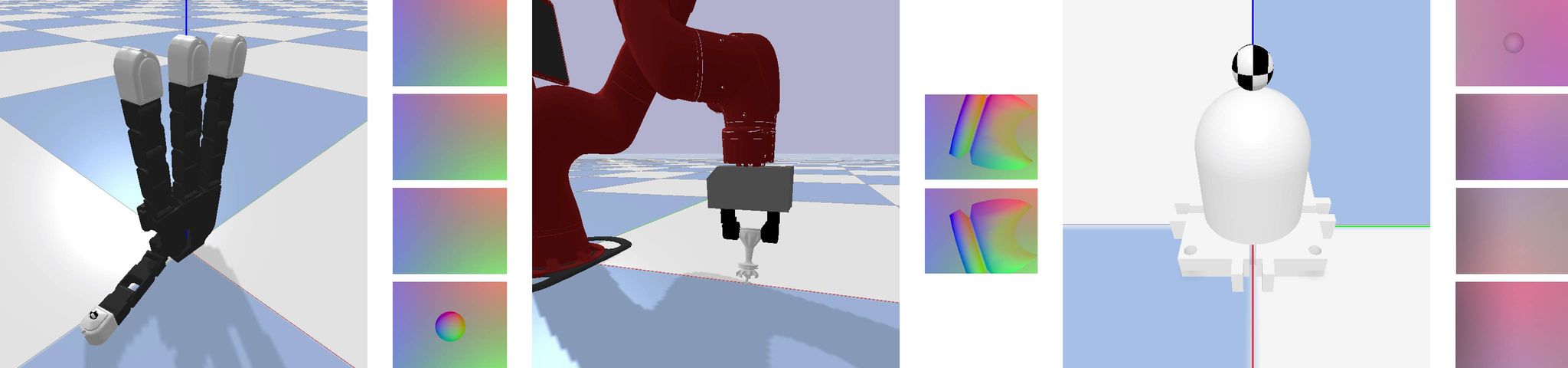
Этот пакет представляет собой симулятор тактильных датчиков на основе машинного зрения, таких как DIGIT. Он предоставляет модели для интеграции с PyBullet, а также средство визуализации сенсорных показаний. Для получения дополнительной информации обратитесь к соответствующему документу TACTO: быстрый, гибкий симулятор с открытым исходным кодом для тактильных датчиков на основе машинного зрения с высоким разрешением.
ПРИМЕЧАНИЕ. Симулятор не предназначен для обеспечения физически точной динамики контактов (например, деформации, трения), а скорее опирается на существующие физические движки.
Для получения обновлений и обсуждений присоединяйтесь к каналу #TACTO в сообществе www.touch-sensing.org.
Предпочтительный способ установки — через PyPi:
pip install tactoАльтернативно вы можете вручную клонировать репозиторий и установить пакет, используя:
git clone https://github.com/facebookresearch/tacto.git
cd tacto
pip install -e . Этот пакет содержит несколько компонентов:
Для запуска следующих примеров требуются дополнительные пакеты (torch, Gym, pybulletX). Вы можете установить их с помощью pip install -r requirements/examples.txt .
Базовый пример использования TACTO в сочетании с PyBullet см. в [TBD]
Пример использования только механизма рендеринга см. в файле example/demo_render.py.
Более сложные примеры использования симулятора с PyBullet можно найти в папке примеров.
ПРИМЕЧАНИЕ. Для рендеринга требуется экран. Для рендеринга без головы используйте режим «EGL» с графическим процессором и драйвером CUDA или режим «OSMESA» с процессором. Дополнительную информацию см. в PyRender.
Кроме того, установите исправленную версию PyOpenGL через:
pip install git+https://github.com/mmatl/pyopengl.git@76d1261adee2d3fd99b418e75b0416bb7d2865e6
Затем вы можете указать, какой движок использовать для безголового рендеринга, например:
import os
os.environ["PYOPENGL_PLATFORM"] = "osmesa" # osmesa cpu rendering
Рекомендуем проводить эксперименты на Ubuntu .
Насколько нам известно, в macOS существует некоторая проблема визуализации между pybullet.GUI и Pyrender. Пожалуйста, дайте нам знать, если эту проблему можно решить, и мы поделимся информацией в репозитории!
Этот проект лицензируется по лицензии MIT, как указано в файле LICENSE.
Если вы используете этот проект в своих исследованиях, укажите:
@Article { Wang2022TACTO ,
author = { Wang, Shaoxiong and Lambeta, Mike and Chou, Po-Wei and Calandra, Roberto } ,
title = { {TACTO}: A Fast, Flexible, and Open-source Simulator for High-resolution Vision-based Tactile Sensors } ,
journal = { IEEE Robotics and Automation Letters (RA-L) } ,
year = { 2022 } ,
volume = { 7 } ,
number = { 2 } ,
pages = { 3930--3937 } ,
issn = { 2377-3766 } ,
doi = { 10.1109/LRA.2022.3146945 } ,
url = { https://arxiv.org/abs/2012.08456 } ,
}

