FREA
1.0.0
 |  |
2024-09-05 Отличные новости! FREA принят CoRL 2024 для устной презентации ??!2024-08-10 Изучите страницу нашего проекта, теперь живем здесь?!2024-08-10 Коды уже выпущены!2024-06-05 Наша статья доступна на Arxiv?!Этот репозиторий содержит реализацию статьи.
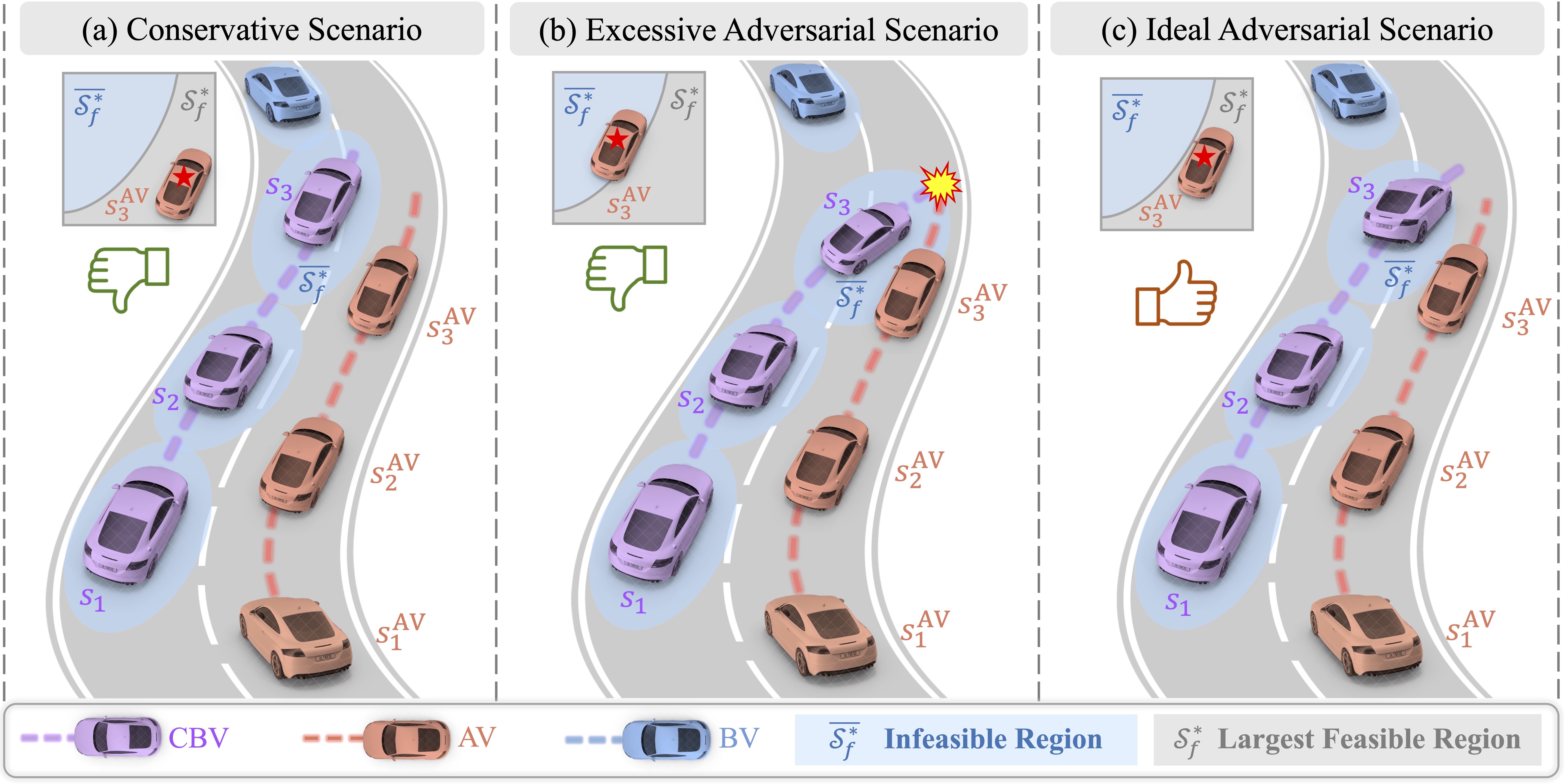
FREA: основанное на технико-экономическом обосновании создание критически важных для безопасности сценариев с разумной враждебностью
Кэю Чен 1 , Юхэн Лэй 2 , Хао Чэн 1 , Хаоран Ву 1 , Вэньчао Сунь 1 , Сифа Чжэн 1
1 Школа транспортных средств и мобильности, Университет Цинхуа 2 Университет Гонконга
Если вы найдете нашу работу полезной, пожалуйста, поставьте нам звезду?!
? FREA использует технико-экономическое обоснование в качестве руководства для создания состязательных, но осуществимых с точки зрения AV и критически важных с точки зрения безопасности сценариев.
Рекомендуемая система: Ubuntu 20.04 или 22.04.
Шаг 1. Установите Carla (рекомендуется версия 0.9.13).
Шаг 2. Настройка среды conda
conda create -n frea python=3.8
conda activate freaШаг 3. Клонируйте этот репозиторий git в соответствующую папку.
git clone [email protected]:CurryChen77/FREA.gitШаг 4. Войдите в корневую папку репо и установите пакеты:
cd FREA
pip install -r requirements.txt
pip install -e . # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Launch in another terminal
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_train.yaml --mode collect_feasibility_data # Merge data
python frea/feasibility/unify_offline_data.py Чтобы использовать офлайн-набор данных в нашей статье, которую можно загрузить отсюда, поместите их в папку feasibility .
# Train optimal feasible value function of AV
python train_feasibility.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_adv_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FPPO-RS
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg fppo_rs_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train PPO
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg ppo_train.yaml --mode train_scenario # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg fppo_adv_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -RenderOffScreen -carla-port=2000
# Train FREA
python scripts/run.py --agent_cfg ppo.yaml --scenario_cfg standard_train.yaml --mode train_agent # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode analysis # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Evaluation FREA
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode renderУбедитесь, что оценка завершена и результаты сохранены в папке.
# Process the recorded data
python eval_analysis/process_data/process_all_data.py
# Plot the evaluation result
python eval_analysis/plot_data/plot_evaluation_result.py # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Set world spectator
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -sp # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize AV route
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg standard_eval.yaml --mode eval -viz_route # Launch CARLA
./CarlaUE4.sh -prefernvidia -windowed -carla-port=2000
# Visualize BEV map
python scripts/run.py --agent_cfg expert.yaml --scenario_cfg FPPO_adv_eval.yaml --mode eval --eval_mode renderЕсли наша статья окажется для вас полезной, пожалуйста, цитируйте нас через:
@inproceedings{
chen2024frea,
title={{FREA}: Feasibility-Guided Generation of Safety-Critical Scenarios with Reasonable Adversariality},
author={Keyu Chen and Yuheng Lei and Hao Cheng and Haoran Wu and Wenchao Sun and Sifa Zheng},
booktitle={8th Annual Conference on Robot Learning},
year={2024},
url={https://openreview.net/forum?id=3bcujpPikC}
}
Эта реализация основана на коде из нескольких репозиториев. Мы искренне благодарим авторов за их замечательную работу.


