oc_chamber
1.0.0
Оперантное обусловливание — это классическая парадигма, используемая в экспериментальной психологии, в которой животные учатся выполнять действие, чтобы получить вознаграждение. Используя эту парадигму, можно извлечь кривые обучения и точно измерить время реакции. Здесь мы описываем полностью 3D-печатное устройство, которое способно выполнять оперантное кондиционирование свободно движущихся мышей, одновременно отслеживая положение животного в реальном времени.
Вы можете найти модели, напечатанные на 3D-принтере, здесь или здесь.
На рисунках/EXPLODED VIEW.jpg представлена интуитивно понятная схема сборки. Все компоненты мы напечатали с помощью Cura 4.0 со средним разрешением (100 мкм), скоростью 90 мм/с и заполнением 20%. Конструкция камеры ОС довольно проста, поэтому почти все принтеры достаточно точны, чтобы успешно печатать всю камеру.
Список всех компонентов можно найти здесь: Спецификация.
ОК-ПАЛАТА
КАМЕРА
ДОСТАВКА
Кроме того, вам необходимо:
Соедините все компоненты, как описано на рисунках/diagram_scheme.png.
Чтобы установить программное обеспечение на Raspberry Pi (RPI), просто загрузите или скопируйте весь код в папку ОС Raspian.
Питон
Ардуино
Скомпилируйте и загрузите в Arduino UNO скетч под названием Skinner.ino.
Для калибровки порогов емкостных датчиков загрузите скетч Arduino под названием SkinnerCapacitiveTest. Эта функция просто печатает значения емкостного датчика последовательного порта. Полезно установить правильное пороговое значение для обнаружения касаний мыши.
Чтобы запустить тип кода в терминале:
cd h ome p i o c_chamber \ or replace with the folder path containing the scpript
python3 cvConditioningTracking.pyАльтернативно откройте cvConditioningTracking в IDLE IDE и нажмите F5.
Пользователь может настроить некоторые низкоуровневые параметры экспериментов, отредактировав значения переменных в первых 25 строках файла cvConditioningTracking.py. Более подробное объяснение этих параметров дано в самом файле.
Камера может проводить эксперименты в двух режимах: режиме обучения и режиме перестановки . Пользователь может выбрать один из двух режимов, отредактировав параметр задачи в файле cvConditioningTracking. Подробности и различия двух режимов можно найти в статье.
В начале экспериментов пользователю предлагается графический интерфейс, который собирает некоторую базовую информацию об экспериментах, которые собираются запустить.
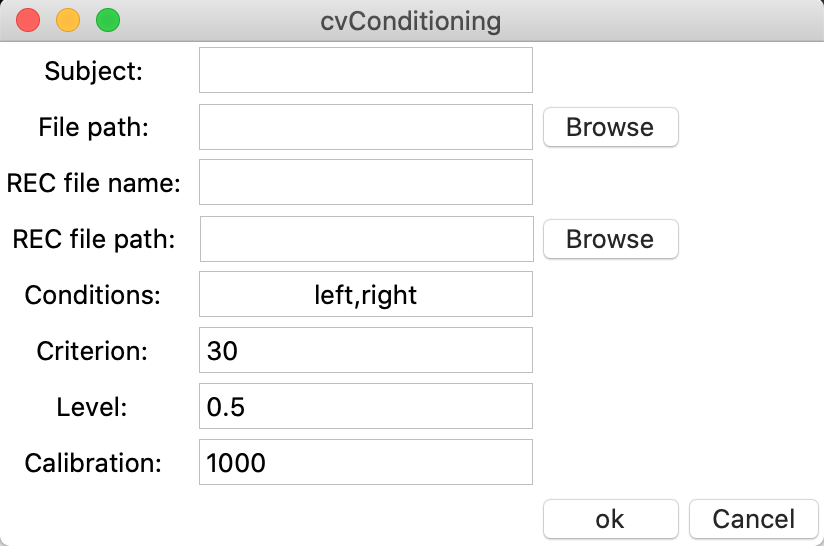
Тема: строка, содержащая идентификатор текущей мыши. Если оставить пустым, файл не сохраняется.
Путь к файлу: место для сохранения файла эксперимента. Выходные данные состоят из двух файлов .txt, содержащих набор данных эксперимента, как описано в разделе «Набор данных», которые хранятся в папках DATA и DATAtracker. Пользователь может найти местоположение на ПК. Если поле оставить пустым, по умолчанию используется текущий рабочий каталог.
Имя файла REC: строка, содержащая имя, которое будет использоваться для сохранения видеозаписи. Если оставить пустым, файл не сохраняется.
Путь к файлу REC: место для сохранения видеозаписи с наложением, содержащим положение мыши и активную область. Пользователь может найти местоположение на ПК. Если поле оставить пустым, по умолчанию используется текущий рабочий каталог.
Условия: Экспериментальные условия. Список стимулов, которые будут предъявлены в эксперименте. Можно указать одно или несколько условий, разделенных запятой:
Все указанные здесь условия будут представлены в случайном порядке.
Критерий: количество кадров, необходимое для того, чтобы мышь оставалась в активной области для активации пробной версии. 20 кадров = 1 секунда
Уровень: выберите вертикальное положение линии, отделяющей активную область камеры от неактивной. Значение нормировано на высоту камеры. 0 = нижняя часть камеры, 1 = верхняя часть камеры, 0,5 (по умолчанию) = середина камеры.
Калибровка: количество кадров, которые будут использоваться в начале эксперимента для калибровки камеры. Калибровка камеры в начале эксперимента важна для лучшего отслеживания мыши по фону.
Другие параметры настройки доступны путем редактирования первых строк следующих файлов:
Чтобы разрешить использование более сложных визуальных стимулов, вы можете найти базовую версию кода, которая работает с ЖК-дисплеем. Для запуска кода требуется Psychopy2. Чтобы установить Psychopy на RPI, следуйте этим инструкциям. После установки Psychopy откройте cvConditioningTracking.py в Psychopy IDE и запустите код. Этот код содержит модуль LCD.py, который можно использовать для отображения выбранных изображений. На данный момент код представляет собой заглушку, непроверенную версию и запускается в демонстрационных целях.
Папка набора данных содержит наши необработанные данные, описанные в этой статье, по 6 субъектам. Каждый предмет содержится в своей папке и закодирован по схеме: КЛЕТКА-ЭТИКЕТКА-ГЕНО. Кроме того, есть два блокнота Jupyter с примером того, как можно читать выходные файлы txt в Python как кадры данных pandas.
Подробное описание устройства можно найти здесь: Устройство для 3D-печати для автоматического оперантного кондиционирования в мыши.
Для получения любой информации и устранения неполадок, не стесняйтесь обращаться к нам по адресу


