Этот код извлекает местное вращение и сегментацию местного Манхэттена из глубины изображений в режиме реального времени. Вот демонстрационное видео для трех разных последовательностей RGB-D: 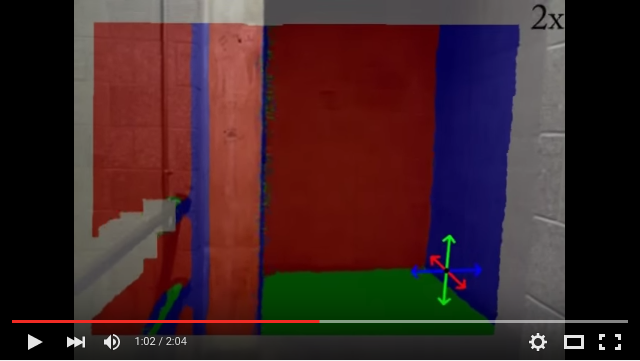
Если вы используете этот код для своего исследования, пожалуйста, цитируйте
Real-time Manhattan World Rotation Estimation in 3D (Julian Straub,
Nishchal Bhandari, John J. Leonard, John W. Fisher III), In IROS, 2015.
Этот код зависит от следующих других библиотек и был протестирован под Ubuntu 14.04.
Ядра графического процессора были протестированы на nvidia Quadro K2000M с вычислительной способностью 3.0.
Как только у вас появятся эти зависимости
make checkout && make configure && make
Это зарегистрирует зависимости от некоторых других моих репозиториев (JSCORE, MMF, CUDEPCL) и составьте все ./Build/
После установки библиотеки Попробуйте запустить следующее, чтобы вывести MF простой сцены после предположения о мире Манхэттена:
./pod-build/bin/realtimeMF -i data/MIT_hallway_1_d.png -o MIT_hallway_1 -d
Там будет файл .CSV с вращением MF и изображением, наложенным на сегментацию на вершине серого изображения сцены.
libcudaPcl.so collects all the cuda code into one shared library. Остальная часть кода находится в форме заголовочных файлов.
Allowed options:
-h [ --help ] produce help message
-m [ --mode ] arg mode of the rtmf (direct, approx, vmf)
-i [ --in ] arg path to input file
-o [ --out ] arg path to output file
-d [ --display ] display results
-B [ --B ] arg B for guided filter
-T [ --T ] arg number of iterations
--eps arg eps for guided filter
-f [ --f_d ] arg focal length of depth camera
--nCGIter arg max number of CG iterations
--dt arg steplength for linesearch
--tMax arg max length for linesearch
Allowed options:
-h [ --help ] produce help message
-m [ --mode ] arg mode of the rtmf (direct, approx, vmf)
-o [ --out ] arg path to output file
-d [ --display ] display results
-B [ --B ] arg B for guided filter
-T [ --T ] arg number of iterations
--eps arg eps for guided filter
-f [ --f_d ] arg focal length of depth camera
--nCGIter arg max number of CG iterations
--dt arg steplength for linesearch
--tMax arg max length for linesearch


