ROScribe
v0.0.4
Создайте пакеты ROS с использованием LLMS.
Используя интерфейс естественного языка для описания роботизированных проектов, Roscribe устраняет барьер навыков использования ROS для начинающих и экономит время и хлопот для квалифицированных инженеров. Roscribe сочетает в себе силу и гибкость крупных языковых моделей (LLMS) с быстрыми методами настройки, чтобы запечатлеть детали вашего роботизированного дизайна и автоматически создавать весь пакет ROS для вашего проекта.
Roscribe создает целое рабочее пространство ROS через агент многоэтапный подход, где каждый шаг фокусируется на одном конкретном аспекте дизайна программного обеспечения робота. В частности, Роскибе помогает вам со следующими шагами:
Если вы новичок в ROS, Roscribe будет вашим наставником робота (ICS)? ️
Если вы опытный пользователь ROS, Roscribe может помочь с созданием проекта для вашего пакета ROS? ️
Роскибе состоит из 4 агентов. Список ниже подробно описывает обязанности каждого агента, показанного в порядке взаимодействия:
SpecAgent : Помогает с общим скелетом вашего проекта. С точки зрения ROS, он создает график ROS вашего проекта, где каждая часть графика может быть либо сгенерирована AI, либо извлеченной из резита с открытым исходным кодом.GenAgent : Учитывая график ROS, этот агент генерирует рабочее пространство ROS и код для каждого узла ROS в Python. В качестве альтернативы, он может загрузить реализацию с открытым исходным кодом для узла ROS.PackAgent : со знанием сгенерированного рабочего пространства ROS, этот агент создает файл запуска ROS, который поднимает узлы ROS. Кроме того, файлы package.xml , CMakeLists.txt и README.md генерируются этим агентом.SupportAgent : Это ваш агент поддержки клиентов, который может помочь вам, когда вы сталкиваетесь с ошибкой во время запуска вашего проекта. Агент уже имеет доступ к макету проекта и может внутренне читать сгенерированные файлы. Следующий рисунок иллюстрирует архитектуру Роскибе: 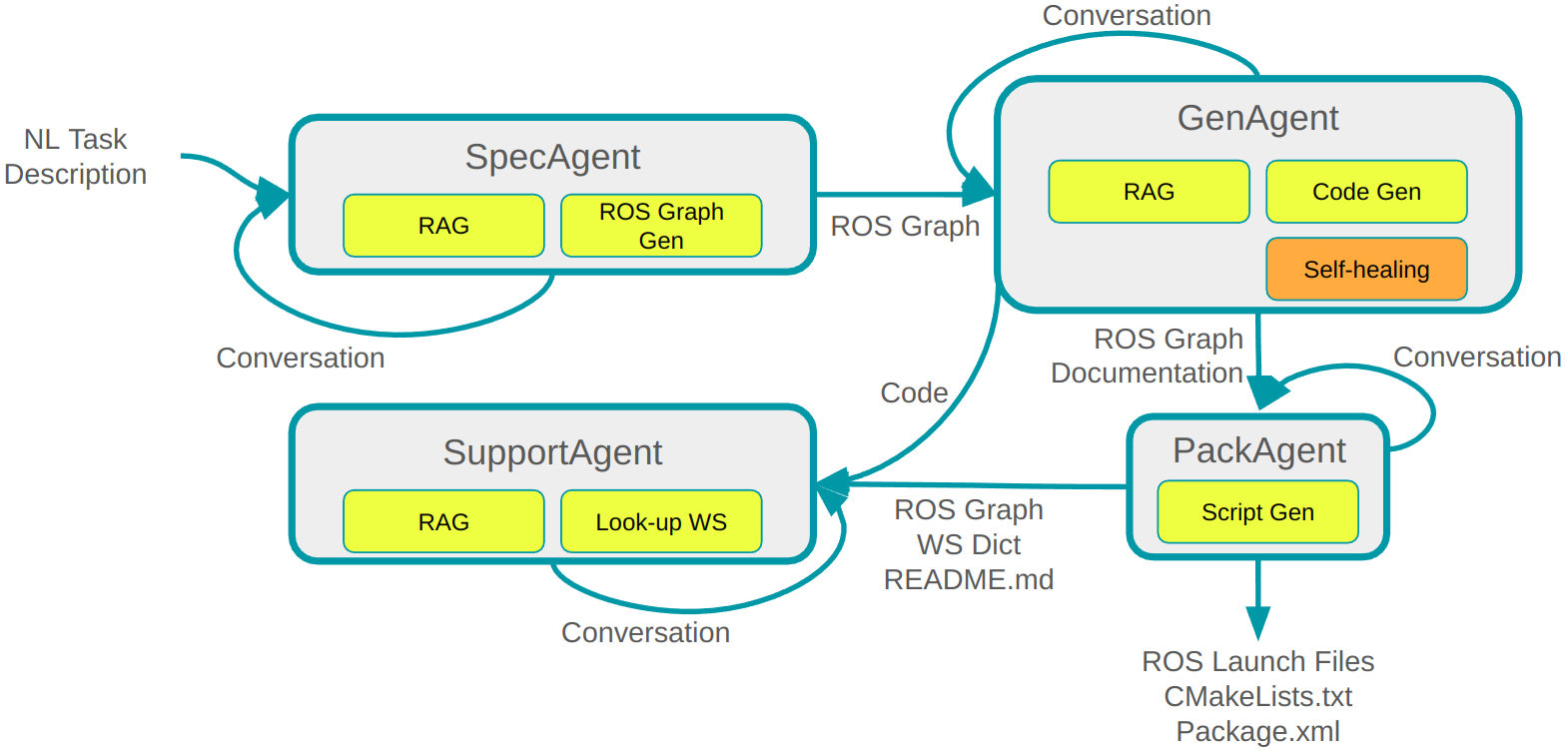
Пожалуйста, посмотрите на нашу страницу вики, чтобы узнать, как установить и использовать Roscribe в ваших проектах по робототехнике:
Заглядывая внутрь Роскибе и идею роботизированной платформы на основе LLM
Презентация слайды UCSD ROS -семинар 27 октября 2023 г.
Видеозапись презентации семинара UCSD ROS 27 октября 2023 г.
Для предпринимательских запросов, таких как консалтинговые или контрактные работы, пожалуйста, свяжитесь с [email protected].
Как проект с открытым исходным кодом, мы призываем всех энтузиастов робототехники внести свой вклад в Roscribe. Во время каждого выпуска мы объявим список новых участников.


