RAGLAB:用於檢索增強生成的模組化且面向研究的統一框架
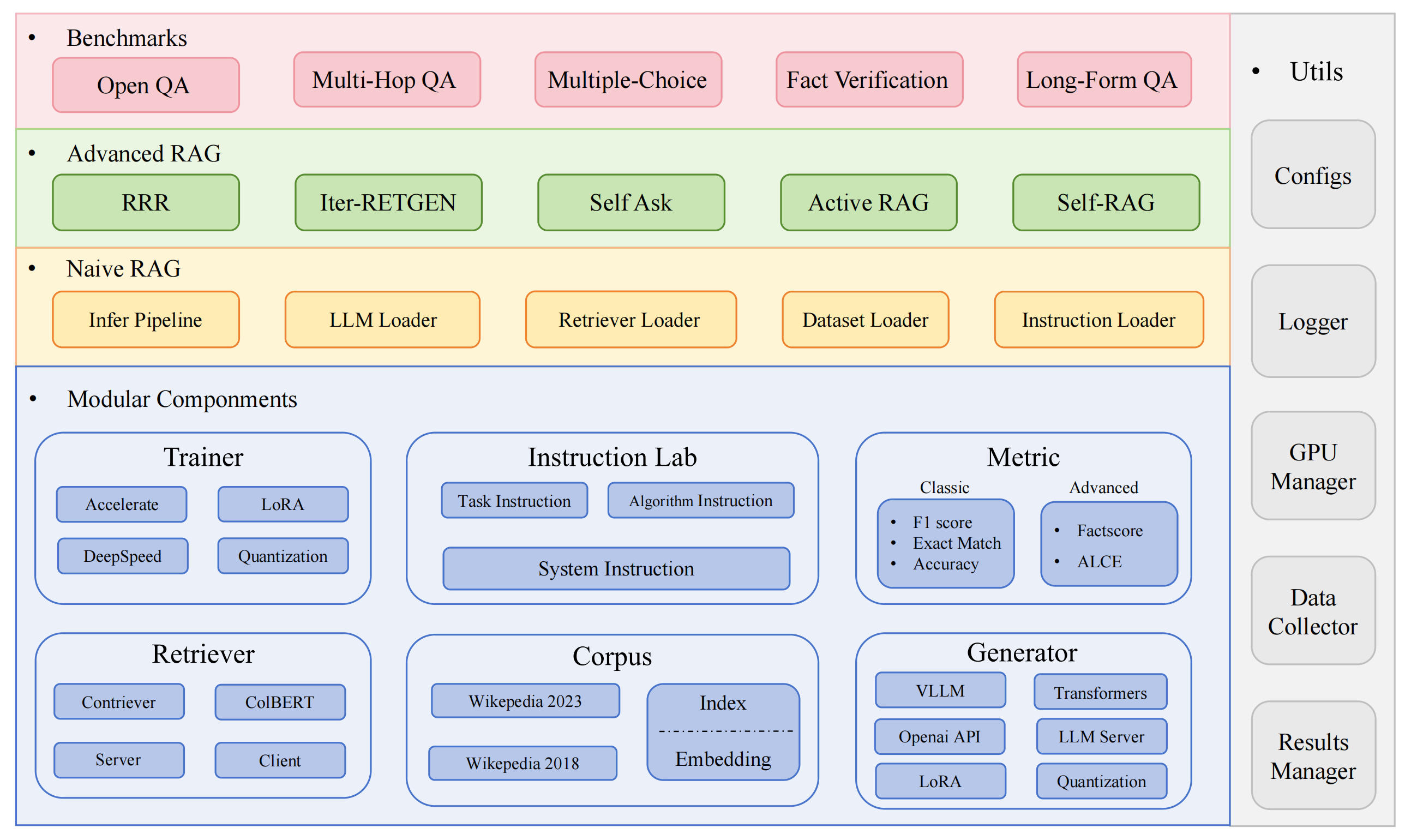
RAGLAB 是一個模組化、研究導向的開源框架,用於檢索增強生成 (RAG) 演算法。它提供了 6 種現有 RAG 演算法的複製品和具有 10 個基準資料集的綜合評估系統,可實現 RAG 演算法之間的公平比較,並輕鬆擴展以高效開發新演算法、資料集和評估指標。

2024年10月6日:我們的論文已被EMNLP 2024系統演示接收。您可以在 RAGLAB 中找到我們的論文。
2024.9.9:RAGLAB開源了評估結果中的所有日誌檔案和評估文件?
2024年8月20日:RAGLAB開源了4個型號?
2024年8月6日:RAGLAB發表了?
全面的 RAG 生態系統:支援從資料收集、培訓到自動評估的整個 RAG 管道。
高階演算法實作:重現 6 種最先進的 RAG 演算法,並具有易於擴展的框架來開發新演算法。
互動模式與評估模式:互動模式專為快速理解演算法而設計。評估模式是專門為再現論文成果和科學研究而設計的。
公平比較平台:提供跨 5 種任務類型和 10 個資料集的 6 種演算法的基準結果。
高效率的檢索器用戶端:提供本地API用於並行存取和緩存,平均延遲低於1秒。
多功能生成器支援:與 70B+ 模型、VLLM 和量化技術相容。
靈活的教學實驗室:針對各種 RAG 場景的可自訂教學範本。
有趣的 RAG 應用
自動調查
開發環境:pytorch:2.0.1-py3.10-cuda11.8.0-devel-ubuntu22.04
安裝迷你康達
git 克隆 RAGLAB
https://github.com/fate-ubw/RAGLAB.git
從 yml 檔案建立環境
cd 拉格實驗室 conda env create -f 環境.yml
手動安裝 flash-attn、en_core_web_sm、punkt
pip install flash-attn==2.2 python -m spacy 下載 en_core_web_sm python -m nltk.downloader punkt
cd 拉格實驗室 mkdir 模型cd 模型 mkdir output_models# 檢索器模型mkdir colbertv2.0 Huggingface-cli 下載 colbert-ir/colbertv2.0 --local-dir colbertv2.0/ --local-dir-use-symlinks False mkdir 設計者-msmarco Huggingface-cli 下載 facebook/contriever-msmarco --local-dir contriever-msmarco/ --local-dir-use-symlinks False# 微調產生器# 8B modelmkdir Llama3-8B-baseline Huggingface-cli 下載 RAGLAB/Llama3-8B-baseline --local-dir Llama3-8B-baseline/ --local-dir-use-symlinks False mkdir selfrag_llama3_8b-epoch_0_1 Huggingface-cli 下載 RAGLAB/selfrag_llama3-8B --local-dir selfrag_llama3_8b-epoch_0_1/ --local-dir-use-symlinks False# 70B modelmkdir Llama3-70B-baseline-adapter Huggingface-cli 下載 RAGLAB/Llama3-70B-baseline-adapter --local-dir Llama3-70B-baseline-adapter/ --local-dir-use-symlinks False mkdir selfrag_llama3_70B-適配器 Huggingface-cli 下載 RAGLAB/selfrag_llama3-70B-adapter --local-dir selfrag_llama3_70B-adapter/ --local-dir-use-symlinks False mkdir Meta-Llama-3-70B Huggingface-cli 下載meta-llama/Meta-Llama-3-70B --local-dir Meta-Llama-3-70B/ --local-dir-use-symlinks False#finetune 和 LoRAmkdir Meta-Llama-3 的基本模型-8B Huggingface-cli 下載meta-llama/Meta-Llama-3-8B --local-dir Meta-Llama-3-8B/ --local-dir-use-symlinks False# ALCE Metric Modelsmkdir gpt2-large Huggingface-cli 下載 openai-community/gpt2-large --local-dir gpt2-large/ --local-dir-use-symlinks False mkdir 羅伯塔-大隊 Huggingface-cli 下載 gaotianyu1350/roberta-large-squad --local-dir roberta-large-squad/ --local-dir-use-symlinks False mkdir t5_xxl_true_nli_mixture Huggingface-cli download google/t5_xxl_true_nli_mixture --local-dir t5_xxl_true_nli_mixture/ --local-dir-use-symlinks False#factscore模型我們使用gpt3.5dkselfself-slperkkk sm來自官方模型的來自官方模型我們的 Huggingface-cli 下載 selfrag/selfrag_llama2_7b --local-dir selfrag_llama2_7b/ --local-dir-use-symlinks False# 你可以從 Huggingface 下載其他模型作為生成器
如果您只需要了解不同演算法如何運作,RAGLAB開發的互動模式可以滿足您的需求。
如果你想重現論文中的結果,你需要從Hugging Face上下載所有需要的數據,包括訓練數據、知識數據和評估數據。我們已經為您打包了所有數據,因此您只需下載即可使用。
cd 拉格實驗室 Huggingface-cli 下載 RAGLAB/data --local-dir data --repo-type 資料集
交互模式專為快速理解演算法而設計。在互動模式下,您可以非常快速地執行各種演算法,以了解不同演算法的推理過程,而無需下載任何額外的資料。
raglab 中整合的所有演算法都包含兩種模式: interact和evaluation 。測試階段以interact方式演示,僅供演示和教育?
筆記
由於colbert對絕對路徑的要求,需要修改設定檔中的index_dbPath和text_dbPath以使用絕對路徑。
修改設定檔中的index_dbPath和text_dbPath :colbert_server-10samples.yaml
index_dbPath:/your_root_path/RAGLAB/data/retrieval/colbertv2.0_embedding/wiki2023-10samples text_dbPath:/your_root_path/RAGLAB/data/retrieval/colbertv2.0_passages/wiki2023-10samples/enwiki-20230401-10samples.tsv
運行科爾伯特伺服器
cd 拉格實驗室 sh 運行/colbert_server/colbert_server-10samples.sh
筆記
此時colbert embedding會提示因路徑錯誤,需要重新處理colbert embedding。請輸入yes ,然後raglab將自動幫助您處理嵌入並啟動colbert伺服器。
現在請打開另一個終端並嘗試請求 colbert 伺服器
cd 拉格實驗室 sh 運行/colbert_server/ask_api.sh
如果回傳結果,則表示colbert伺服器啟動成功! ?
運行 selfrag(簡短形式和自適應檢索)互動模式測試 10 樣本嵌入
cd 拉格實驗室 sh run/rag_inference/3-selfrag_reproduction-interact-short_form-adaptive_retrieval.sh
恭喜!
在raglab中,每個演算法在互動模式下內建了10個查詢,這些查詢是從不同的基準測試中採樣的
筆記
記得在運行論文結果之前下載 wiki2018 知識資料庫和模型
由於colbert對絕對路徑的要求,需要修改設定檔中的index_dbPath和text_dbPath並處理wiki2018嵌入資料庫
cd RAGLAB/config/colbert_server
vim colbert_server.yaml
index_dbPath:{your_root_path}/RAGLAB/data/retrieval/colbertv2.0_embedding/wiki2018
text_dbPath:{your_root_path}/RAGLAB/data/retrieval/colbertv2.0_passages/wiki2018/wiki2018.tsv vim /data/retrieval/colbertv2.0_embedding/wiki2018/indexes/wiki2018/metadata.json#更改根路徑,其他參數不需要修改"collection": "/{your_root_path}/RAGLAB/data/retrieval/colbertv2. 0_passages/wiki_path}/RAGLAB/data/retrieval/colbertv2. 0_passages/wiki2018 /wiki2018.tsv","實驗": "/{your_root_path}/RAGLAB/data/retrieval/colbertv2.0_embedding/wiki2018",修改wiki2018嵌入原始檔中綁定的絕對路徑
修改設定檔中的路徑
注意:colbert_server 至少需要 60GB 內存
cd 拉格實驗室 sh 運行/colbert_server/colbert_server.sh
打開另一個終端測試您的 ColBERT 伺服器
cd 拉格實驗室 sh 運行/colbert_server/ask_api.sh
ColBERT伺服器啟動成功! ?
推理實驗需要並行運行數百個腳本,需要使用自動GPU調度器為並行的不同bash腳本自動分配GPU。
安裝simple_gpu_scheduler
pip 安裝 simple_gpu_scheduler
在一條線上運行數百個實驗?
cd 拉格實驗室 simple_gpu_scheduler --gpus 0,1,2,3,4,5,6,7 < auto_gpu_scheduling_scripts/auto_run-llama3_8b-baseline-scripts.txt#其他腳本可以用同樣的方法運行
如何寫your_script.txt?
# auto_inference_selfreg-7b.txtsh run/rag_inference/selfrag_reproduction/selfrag_reproduction-evaluation-short_form-PubHealth-adaptive_retrieval-pregiven_passages.sh sh run/rag_inference/selfrag_reproduct/selfrag_reproduct-evaluation-short_form-PubHealth-always_retrieval-pregiven_passages.sh
這是一個例子
RAGLAB包括3種經典的評估方法:準確度、F1和EM(精確匹配)。這3種方法計算簡單,可以在推理過程中動態計算。然而,ALCE 和 Factscore 這兩個高階指標需要在評估之前完成推理過程。
ALCE :RAGLAB 已將 ALCE 儲存庫整合到 RAGLAB 中。您只需在設定檔中設定推理結果的路徑即可。
cd RAGLABcd run/ALCE/# 變更每個 sh 檔案中推理產生檔案的路徑# 例如:# python ./ALCE/eval.py --f './data/eval_results/ASQA/{your_input_file_path}.jsonl' # - -mauve # --qasimple_gpu_scheduler --gpus 0,1,2,3,4,5,6,7 < auto_gpu_scheduling_scripts/auto_eval_ALCE.txt評估結果將與輸入檔在同一目錄下,檔名後綴為.score
Factscore :Factscore 環境需要安裝torch 1.13.1 ,這與 RAGLAB 訓練和推理模組所需的 flash-attn 版本衝突。因此,RAGLAB目前無法整合Factscore環境,因此使用者需要單獨安裝Factscore環境進行評估。
安裝Factscore環境後,請修改bash檔案中推理結果的路徑
cd RAGLAB/run/Factscore/# 變更每個 sh 檔案中推理產生檔案的路徑# 例如:# python ./FActScore/factscore/factscorer.py # --input_path './data/eval_results/Factscore/{your_input_file_path './data/eval_results/Factscore/{your_input_file_path }. jsonl' # --model_name "retrieval+ChatGPT"# --openai_key ./api_keys.txt # --data_dir ./data/retrieval/colbertv2.0_passages/wiki2023 # --verbosesimple_gpu_scheduler --gpus 0,1,2, 3, 4,5,6,7 < auto_gpu_scheduling_scripts/auto_eval_Factscore.txt評估結果將與輸入檔案在同一目錄下,檔案名稱後綴為_factscore_output.json
筆記
在Factscore評估過程中,我們使用GPT-3.5作為評估模型,因此無需下載本地模型。如果需要使用本地模型評估Factscore,請參考Factscore
如果您想自行處理知識庫,請參考以下步驟。 RAGLAB已將處理後的知識庫上傳至Hugging Face
文件:process_wiki.md
本節介紹 RAGLAB 中訓練模型的過程。您可以從 HuggingFace? 下載所有預訓練模型,或使用下面的教學從頭開始訓練。
所有數據提供了微調所需的所有數據。
文件:train_docs.md
如果您發現此儲存庫有用,請引用我們的工作。
@inproceedings{zhang-etal-2024-raglab,
title = "{RAGLAB}: A Modular and Research-Oriented Unified Framework for Retrieval-Augmented Generation",
author = "Zhang, Xuanwang and
Song, Yunze and
Wang, Yidong and
Tang, Shuyun and
others",
booktitle = "Proceedings of the 2024 Conference on Empirical Methods in Natural Language Processing: System Demonstrations",
month = dec,
year = "2024",
publisher = "Association for Computational Linguistics",
}RAGLAB 根據 MIT 許可證獲得許可。