3DObjectTracking
1.0.0
يعد تتبع الكائنات والهياكل الحركية في الفضاء ثلاثي الأبعاد وتحديد أوضاعها وتكويناتها مهمة أساسية في رؤية الكمبيوتر. يتراوح تطبيقه من الواقع المعزز إلى الإدراك الآلي. نظرًا لإطارات الصور المتتالية، بالإضافة إلى الشبكات ثلاثية الأبعاد والمعلومات الحركية، فإن الهدف هو تقدير دوران وترجمة جميع الأجسام المتعلقة بالكاميرا بقوة. على الرغم من دراسة المشكلة بدقة، إلا أن العديد من التحديات مثل الإطباق الجزئي وتغييرات المظهر وضبابية الحركة وفوضى الخلفية وغموض الكائن ومتطلبات الوقت الفعلي لا تزال موجودة.
في هذا المستودع، سننشر باستمرار الخوارزميات والتعليمات البرمجية الخاصة بأبحاثنا المستمرة حول تتبع الكائنات ثلاثية الأبعاد. تتضمن مجلدات الخوارزميات المختلفة كل ما هو ضروري لإعادة إنتاج النتائج المقدمة في أوراقنا. لاحظ أن الكود الخاص بكل ورقة جديدة يتضمن أيضًا نسخة محدثة من العمل السابق. إذا كنت ترغب في استخدام أداة التتبع الخاصة بنا في مشروعك أو تطبيقك الخاص، فيرجى استخدام الكود من أحدث المنشورات. حاليًا، يمكن العثور على أحدث إصدار من الكود الخاص بنا في المجلد M3T .

إطار تتبع متعدد الأجسام - من الأجسام الصلبة إلى الهياكل الحركية

دمج المظهر المرئي والهندسة لتتبع الكائنات 6DoF متعدد الأساليب
عرض CVPR 2022

الهندسة المقابلة التكرارية
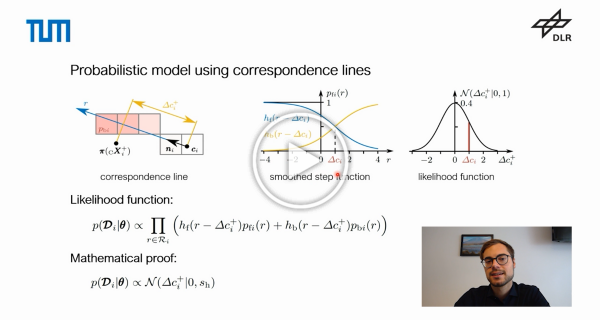
العرض الشفهي ACCV 2020
نهج غاوسي متناثر لتتبع كائن 6DoF على أساس المنطقة
نهج غاوسي متناثر لتتبع كائن 6DoF على أساس المنطقة


