Navigating Ryze Tello Drones With MATLAB App
v1.1.1
للتحكم بشكل تفاعلي في طائرة Ryze® Tello Drone المتصلة بجهاز الكمبيوتر الخاص بك الذي يستخدم MATLAB®، توفر MathWorks® تطبيق MATLAB - Ryze Tello Navigator. هذا التطبيق يساعدك على:
عرض جميع طائرات Ryze Tello بدون طيار المتصلة بشبكة WiFi للكمبيوتر.
أداء الإقلاع/الهبوط لطائرة بدون طيار.
تحكم في تنقل الطائرة بدون طيار باستخدام لوحة المفاتيح أو باستخدام أزرار التحكم في التنقل الموجودة في التطبيق.
معاينة تغذية الكاميرا والتقاط الصور.
قم بتسجيل تغذية فيديو الطائرة بدون طيار في متغير مساحة عمل MATLAB.
قم بإنشاء برنامج MATLAB النصي للتنقل المكتمل.
قم بتثبيت حزمة دعم MATLAB وMATLAB لطائرات Ryze Tello Drones
قم بإجراء الإعداد والتكوين الأولي وقم بالاتصال بواحدة أو أكثر من طائرات Ryze Tello Drones.
قم بتنزيل أو استنساخ هذا المستودع.
انتقل إلى مجلد المستودع المحلي في MATLAB
قم بتنفيذ الأوامر التالية في نافذة أوامر MATLAB:
addpath(pwd);
savepath;
قم بتشغيل التطبيق عن طريق تنفيذ أمر ryzeTelloNavigator .
يتطلب إصدار MATLAB R2022a أو أحدث
حزمة دعم MATLAB® لطائرات Ryze Tello® بدون طيار
تأكد من أن الطائرة بدون طيار التي تظهر في قائمة الأجهزة هي التي ترغب في التحكم فيها باستخدام التطبيق. إذا لم تكن الطائرة بدون طيار مدرجة، فقم بإجراء الإعداد والتكوين مرة أخرى.
| خطوة | فعل | نتيجة |
|---|---|---|
| 1 |  انقر فوق اسم الطائرة بدون طيار من قائمة الأجهزة وانقر فوق فحص ما قبل الرحلة في قسم التنقل في الجزء العلوي. انقر فوق اسم الطائرة بدون طيار من قائمة الأجهزة وانقر فوق فحص ما قبل الرحلة في قسم التنقل في الجزء العلوي. | يظهر مربع حوار جديد، قيد التشغيل قائمة التحقق قبل الرحلة. يتم تعطيل كافة عناصر التحكم الأخرى في التطبيق أثناء إجراء فحص ما قبل الرحلة. في حالة وجود أخطاء، يوفر مربع الحوار روابط لخطوات استكشاف الأخطاء وإصلاحها المطلوبة |
| 2 | بعد التحقق من اكتمال جميع فحوصات ما قبل الرحلة بنجاح، انقر فوق "موافق". |  تظهر إشارة اكتمال فحص ما قبل الرحلة على الجانب الأيمن من التطبيق. يتم أيضًا تمكين كافة عناصر التحكم الأخرى. تظهر إشارة اكتمال فحص ما قبل الرحلة على الجانب الأيمن من التطبيق. يتم أيضًا تمكين كافة عناصر التحكم الأخرى. |
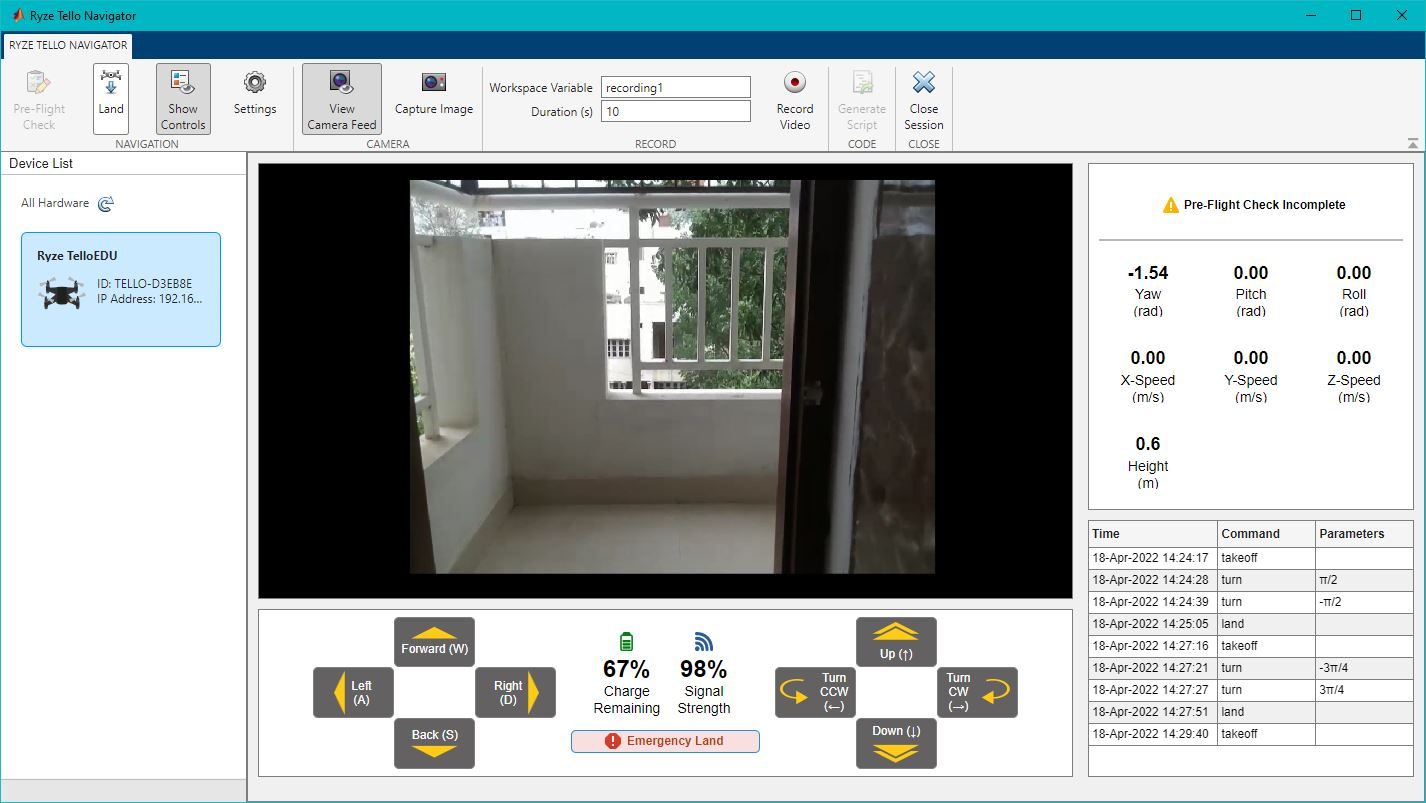
يساعدك Ryze Tello Navigator على أداء الإقلاع/الهبوط والتحكم بشكل تفاعلي في طائرة Ryze Tello بدون طيار.
ملحوظة : قبل البدء في إقلاع الطائرة بدون طيار، خذ في الاعتبار احتياطات السلامة العامة. إذا شعرت بأي ضرر يمكن أن يحدث للطائرة بدون طيار والمناطق المحيطة بها أثناء الإقلاع أو أثناء إجراء التحكم اليدوي في الملاحة (كما هو مذكور في الخطوات اللاحقة)، فيمكنك النقر فوق أرض الطوارئ . يؤدي النقر فوق هذا الزر إلى إيقاف تشغيل محركات الطائرة بدون طيار في حالات الطوارئ مما يؤدي إلى سقوطها على الأرض من الارتفاع الحالي (بالنسبة لطائرات Tello EDU بدون طيار) أو إجبار الطائرة بدون طيار على الهبوط عموديًا من موقعها الحالي (بالنسبة لطائرات Tello بدون طيار).
| خطوة | فعل | نتيجة |
|---|---|---|
| 1 |  تأكد من أن شحن البطارية وقوة إشارة الطائرة بدون طيار، كما هو معروض في التطبيق، كافية لإجراء الإقلاع والتحكم. تأكد من أن شحن البطارية وقوة إشارة الطائرة بدون طيار، كما هو معروض في التطبيق، كافية لإجراء الإقلاع والتحكم. | |
| 2 |  انقر فوق عرض موجز الكاميرا للتحقق من أن تغذية الكاميرا من الطائرة بدون طيار تعمل بشكل صحيح. انقر فوق عرض موجز الكاميرا للتحقق من أن تغذية الكاميرا من الطائرة بدون طيار تعمل بشكل صحيح. | يعرض التطبيق المعاينة، كما تراها كاميرا الطائرة بدون طيار قبل الإقلاع. لاحقًا، عندما تتحرك الطائرة بدون طيار، سيتم تحديث المعاينة بالبث المباشر من الكاميرا. |
| 3 |  إما أن تضغط على مفتاح المسافة بلوحة المفاتيح أو انقر فوق Take Off الذي يظهر في قسم التنقل في منطقة شريط الأدوات. إما أن تضغط على مفتاح المسافة بلوحة المفاتيح أو انقر فوق Take Off الذي يظهر في قسم التنقل في منطقة شريط الأدوات. | تبدأ محركات الطائرة بدون طيار وتقلع الطائرة بدون طيار إلى ارتفاع معين وتحوم في هذا الموضع. يتم استبدال زر الإقلاع بزر الأرض . |
| 4 | قم بإجراء التنقل اليدوي للطائرة بدون طيار من التطبيق إما عن طريق النقر على الأيقونات المعنية في التطبيق أو باستخدام لوحة المفاتيح. | تتحرك الطائرة بدون طيار وفقًا لعنصر التحكم في الملاحة الذي قمت بتشغيله. يتم أيضًا تحديث موجز الكاميرا (المعاينة)، إذا تم تمكينه. لزيادة مساحة نافذة المعاينة كما هو موضح في التطبيق، يمكنك إخفاء الجزء الذي يعرض أزرار التحكم اليدوي. انقر فوق إظهار عناصر التحكم لتعطيل الجزء. لا يزال بإمكانك استخدام مفاتيح لوحة المفاتيح للتحكم في الطائرة بدون طيار. |
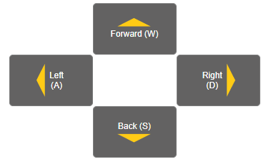
مفاتيح WASD:
ث – المضي قدما
أ- التحرك لليسار
س – التحرك للخلف
د – التحرك لليمين
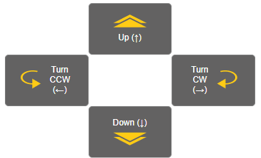
مفاتيح الأسهم:
▲ – حرك الطائرة بدون طيار لأعلى
▼ – حرك الطائرة بدون طيار إلى الأسفل
◄ – أدر الطائرة بدون طيار عكس اتجاه عقارب الساعة
► – أدر الطائرة بدون طيار في اتجاه عقارب الساعة
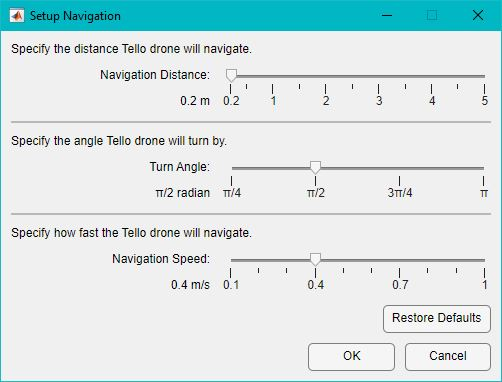
يمكنك تغيير إعدادات التنقل التي تستخدمها الطائرة بدون طيار في كل مرة تقوم فيها بتشغيل الحركة في اتجاه معين. انقر فوق الإعدادات لفتح مربع حوار إعداد التنقل، وحدد قيم المسافة والزاوية والسرعة باستخدام أشرطة التمرير. إذا كنت تريد استعادة القيم الافتراضية (مسافة التنقل: 0.2 م، زاوية الدوران: π/2، سرعة التنقل: 0.4 م/ث)، انقر فوق استعادة الإعدادات الافتراضية في مربع الحوار.

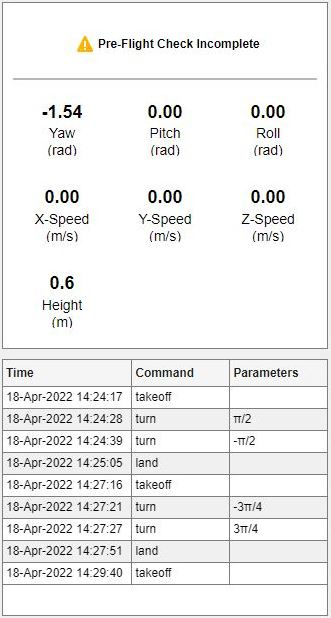
يعرض التطبيق أيضًا بيانات التنقل المباشرة (كما تم التقاطها بواسطة مستشعرات الطائرة بدون طيار) وأيضًا سجل الأوامر التي قمت بتشغيلها باستخدام أزرار التنقل أو مفاتيح لوحة المفاتيح. تظهر هذه المعلومات على اللوحة اليمنى.
يساعدك Ryze Tello Navigator على التقاط الصور وتسجيل الفيديو كما تراه من خلال كاميرا FPV الخاصة بطائرة Ryze Tello بدون طيار.
| خطوة | فعل | نتيجة |
|---|---|---|
| 1 |  التقاط صورة واحدة في وقت واحد. التقاط صورة واحدة في وقت واحد. | يتم تخزين الصورة كمتغير مساحة العمل. |
| 2 |  حدد متغير مساحة العمل والمدة لتسجيل الفيديو، ثم انقر فوق تسجيل الفيديو. حدد متغير مساحة العمل والمدة لتسجيل الفيديو، ثم انقر فوق تسجيل الفيديو. | يبدأ تسجيل الفيديو من كاميرا الطائرة بدون طيار للمدة المحددة. انقر فوق إيقاف لإيقاف التسجيل في أي وقت أثناء التسجيل، ثم يتم حفظ الفيديو تلقائيًا في مساحة العمل كمصفوفة صور. |
يساعدك Ryze Tello Navigator على إنشاء برنامج نصي Live Editor للتنقل الذي قمت به. يمكنك استخدام هذا البرنامج النصي لتحديد الإعداد الأولي ومسار الرحلة للطائرة بدون طيار ثم إضافة خوارزميات مخصصة لتنفيذ مهام سير عمل إضافية.

للقيام بذلك، انقر فوق إنشاء برنامج نصي بعد هبوط الطائرة بدون طيار بنجاح.
| تحذيرات | المشكلة والإجراء الموصى به |
|---|---|
| انخفاض مستوى البطارية | يبدأ التطبيق في عرض التحذيرات إذا أظهر مؤشر الشحن المتبقي قيمة أقل من 20% وكانت الطائرة بدون طيار تحلق أو تحوم. إذا انخفض مستوى البطارية إلى أقل من 10%، تهبط الطائرة بدون طيار تلقائيًا من موضعها الحالي. لتجنب ذلك، تأكد من هبوط الطائرة بدون طيار باستخدام زر الأرض في التطبيق ثم استبدل بطارية الطائرة بدون طيار. |
| قوة إشارة منخفضة | يعرض التطبيق باستمرار قيم قوة الإشارة أثناء تحليق الطائرة بدون طيار. يوصى باتخاذ الإجراء اللازم إذا كانت قوة الإشارة أقل من 20% لتجنب فقدان السيطرة على الطائرة بدون طيار. في حالة فقدان الاتصال بالطائرة بدون طيار، يظهر مربع حوار يوضح خيار إعادة الاتصال بالطائرة بدون طيار. إذا استمر الفشل، فسيتم عرض رسالة خطأ. |
الترخيص متاح في ملف LICENSE.TXT في مستودع GitHub هذا.
ماتلاب سنترال
حقوق الطبع والنشر لعام 2022 محفوظة لشركة MathWorks, Inc.


