VERI-Wild: مجموعة بيانات كبيرة وطريقة جديدة لإعادة تحديد هوية المركبات في البرية

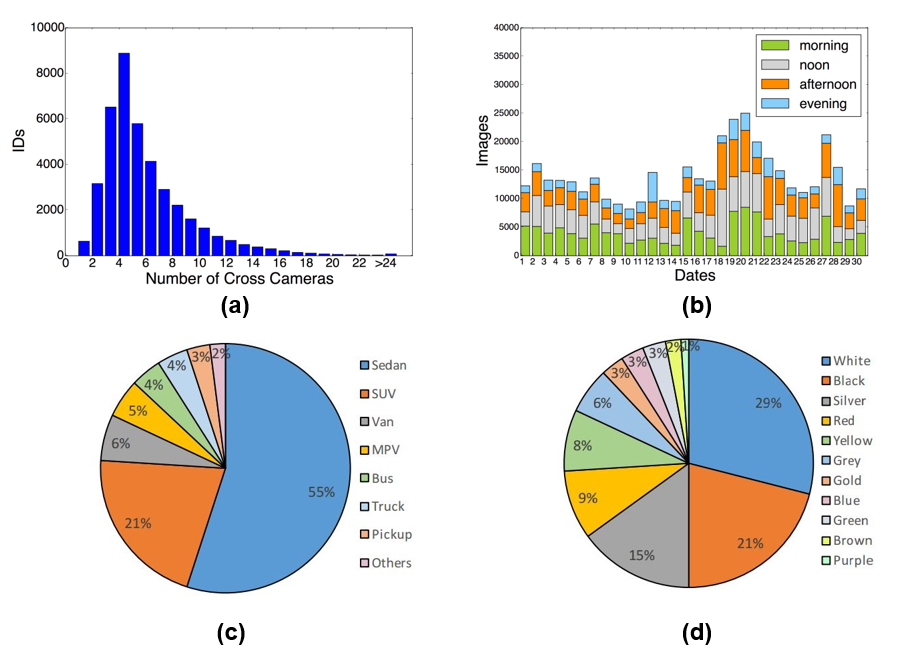
يتم التقاط مجموعة بيانات ReID واسعة النطاق للمركبة في البرية (VERI-Wild) من نظام مراقبة CCTV كبير يتكون من 174 كاميرا على مدار شهر واحد (30*24 ساعة) في ظل سيناريوهات غير مقيدة. يتم توزيع الكاميرات في منطقة حضرية كبيرة تبلغ مساحتها أكثر من 200 كيلومتر مربع. يتم استخدام YOLO-v2 [2] للكشف عن الصندوق المحيط بالمركبات. تحتوي مجموعة صور المركبات الأولية على 12 مليون صورة للمركبات، و11 متطوعًا مدعوون لتنظيف مجموعة البيانات لمدة شهر واحد. بعد تنظيف البيانات والتعليق عليها، يتم جمع 416,314 صورة مركبة لـ 40,671 هوية. تم توضيح إحصائيات VERI-Wild في الشكل. بالنسبة لقضايا الخصوصية، يتم إخفاء لوحات الترخيص في مجموعة البيانات. تتلخص السمات المميزة لـ VERI-Wild في الجوانب التالية:
Unconstrained capture conditions in the wild يتم جمع مجموعة بيانات VERI-Wild من نظام كاميرا CCTV حقيقي يتكون من 174 كاميرا مراقبة، حيث تشكل ظروف التقاط الصور غير المقيدة مجموعة متنوعة من التحديات.
Complex capture conditions يتم توزيع كاميرات المراقبة البالغ عددها 174 كاميرا في منطقة حضرية تزيد مساحتها عن 200 كيلومتر مربع، وتقدم خلفيات ودقة ووجهات نظر وتغطية متنوعة في البرية. في الحالات القصوى، تظهر مركبة واحدة في أكثر من 40 كاميرا مختلفة، الأمر الذي قد يمثل تحديًا لخوارزميات ReID.
Large time span involving severe illumination and weather changes تم جمع VERI-Wild من مدة 125,280 (174x24x30) ساعة فيديو. ويعطي الشكل (ب) توزيعات المركبات في 4 فترات زمنية مدتها 24 ساعة، أي الصباح والظهيرة وبعد الظهر والمساء على مدار 30 يومًا. يحتوي VERI-Wild أيضًا على ظروف مناخية سيئة، مثل الأمطار والضباب وما إلى ذلك، والتي لم يتم توفيرها في مجموعات البيانات السابقة.
Rich Context Information نحن نقدم معلومات سياقية غنية مثل معرفات الكاميرا، والطابع الزمني، وعلاقة المسارات عبر الكاميرات، والتي من المحتمل أن تسهل البحث حول تحليل السلوك في شبكات الكاميرات، مثل نمذجة سلوك المركبات، والتتبع عبر الكاميرات، والاسترجاع القائم على الرسم البياني.
مهم!!!!!!!!!
لاحظ أنه بالنسبة لمجموعة اختبار VERI-Wild، في ضوء صورة استعلام، تحتاج إلى إزالة الصور التي لها نفس معرف الكاميرا ونفس معرف السيارة كصورة الاستعلام في مجموعة المعرض. ولا يتم أخذها في الاعتبار عند حساب mAP وCMC.
@inproceedings{lou2019large,
title={VERI-Wild: A Large Dataset and a New Method for Vehicle Re-Identification in the Wild},
author={Lou, Yihang and Bai, Yan and Liu, Jun and Wang, Shiqi and Duan, Ling-Yu},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
pages = {3235--3243},
year={2019}
}@inproceedings{lou2019large,
title={Disentangled Feature Learning Network and a Comprehensive Benchmark for Vehicle Re-Identification},
author={Bai, Yan and Liu, Jun and Lou, Yihang and Wang, Ce and Duan, Ling-Yu},
booktitle={In IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2021}
}يان باي، البريد الإلكتروني: [email protected]
لتشجيع الأبحاث ذات الصلة، سنوفر مجموعة البيانات وفقًا لطلبك. يرجى إرسال اسمك الكامل وانتمائك بالبريد الإلكتروني إلى جهة الاتصال (yanbai at pku dot edu dot cn). نحن نطلب معلوماتك فقط للتأكد من أن مجموعة البيانات تستخدم لأغراض غير تجارية. ولن نعطيها لأي طرف ثالث أو ننشرها علنًا في أي مكان. نظرًا لمسألة الخصوصية، لن نقوم بتوفير لوحات الترخيص في المستقبل. إذا قمت بتنزيل مجموعة البيانات الخاصة بنا، فهذا يعني أنك وافقت على شروط الوصول الخاصة بنا في البريد الإلكتروني.
| طُرق | صغير | واسطة | كبير | ||||||
| رسم خريطة | أعلى1 | أعلى 5 | رسم خريطة | أعلى1 | أعلى 5 | رسم خريطة | أعلى1 | أعلى 5 | |
| جوجل نت[1] | 24.27 | 57.16 | 75.13 | 24.15 | 53.16 | 71.1 | 21.53 | 44.61 | 63.55 |
| ادارة الاغذية والعقاقير-شبكة (VGGM) [2] | 35.11 | 64.03 | 82.80 | 29.80 | 57.82 | 78.34 | 22.78 | 49.43 | 70.48 |
| ملسل[3] | 46.32 | - | - | 42.37 | - | - | 36.61 | - | - |
| الثلاثي (Resnet50) | 58.43 | 65.76 | 86.98 | 49.72 | 57.76 | 80.86 | 38.57 | 47.65 | 71.66 |
| ادارة الاغذية والعقاقير-شبكة (Resnet50) [2] | 61.57 | 73.62 | 91.23 | 52.69 | 64.29 | 85.39 | 45.78 | 58.76 | 80.97 |
| أفير (Resnet50)[4] | 62.23 | 75.80 | 92.70 | 53.66 | 68.24 | 88.88 | 41.68 | 58.69 | 81.59 |
| دي إف إل نت (Resnet50)[5] | 68.21 | 80.68 | 93.24 | 60.07 | 70.67 | 89.25 | 49.02 | 61.60 | 82.73 |
| بكالوريوس (الشبكة المتنقلة)[6] | 70.54 | 84.17 | 95.30 | 62.83 | 78.22 | 93.06 | 51.63 | 69.99 | 88.45 |
| يو إم تي إس (Resnet50)[7] | 72.7 | 84.5 | - | 66.1 | 79.3 | - | 54.2 | 72.8 | - |
| بيزلين قوي (Resnet50)[8] | 76.61 | 90.83 | 97.29 | 70.11 | 87.45 | 95.24 | 61.3 | 82.58 | 92.73 |
| HPGN(Resnet50+PGN)[9] | 80.42 | 91.37 | - | 75.17 | 88.21 | - | 65.04 | 82.68 | - |
| بهجة (Resnet50+PGN)[10] | 77.15 | 92.13 | 97.43 | - | - | - | - | - | - |
| بفين (Resnet50) [12] | 79.8 | 94.01 | 98.06 | 73.9 | 92.03 | 97.15 | 66.2 | 88.62 | 95.31 |
| التوقف (Resnet50)[11] | 80.9 | 93.78 | 97.93 | 75.3 | 92.7 | 97.48 | 67.7 | 89.5 | 95.8 |
| DFNet(Resnet50)[14] | 83.09 | 94.79 | 98.05 | 77.27 | 93.22 | 97.46 | 69.85 | 89.38 | 96.03 |
| طُرق | اختبار تعيين الكل | مجموعة الاختبار أ | مجموعة الاختبار ب | ||||||
| رسم خريطة | أعلى1 | أعلى 5 | رسم خريطة | أعلى1 | أعلى 5 | رسم خريطة | أعلى1 | أعلى 5 | |
| خط الأساس القوي (Resnet50) [8] | 34.71 | 54.37 | 63.99 | 32.75 | 40.12 | 52.18 | 42.25 | 82.72 | 90.67 |
| GSTE (Resnet50) (مع كيس من الحيل)[13] | 32.57 | 59.25 | 64.48 | 33.01 | 47.54 | 50.81 | 41.82 | 86.08 | 91.43 |
| FDA-Net (Resnet50) (مع كيس من الحيل) [2] | 34.21 | 57.32 | 64.90 | 34.63 | 45.53 | 52.77 | 3.93 | 84.78 | 92.47 |
| من أي وقت مضى (Resnet50) [41] | 36.8 | 59.1 | 67.6 | 36.8 | 48.7 | 57.3 | 45.4 | 86.1 | 94.3 |
| بفين (Resnet50) [12] | 37.15 | 61.19 | 68.63 | 38.77 | 51.28 | 59.32 | 45.48 | 88.05 | 94.35 |
| التوقف (Resnet50)[11] | 38.0 | 62.1 | 69.50 | 39.2 | 52.3 | 60.2 | 45.1 | 88.1 | 94.1 |
| DFNet(Resnet50)[14] | 39.84 | 62.21 | 68.90 | 40.39 | 51.68 | 60.51 | 46.13 | 88.56 | 94.17 |
[1] Yang, L., Luo, P., Change Loy, C., Tang, X.: مجموعة بيانات سيارات واسعة النطاق للتصنيف الدقيق والتحقق. في: مؤتمر IEEE حول الرؤية الحاسوبية والتعرف على الأنماط. (2015)
[2] Lou, Y., Bai, Y., Liu, J., Wang, S., Duan, L.: Veri-wild: مجموعة بيانات كبيرة وطريقة جديدة لإعادة تحديد هوية المركبات في البرية. في: مؤتمر IEEE حول الرؤية الحاسوبية والتعرف على الأنماط. (2019)
[3] Alfasly, S., Hu, Y., Li, H., Liang, T., Jin, X., Liu, B., Zhao, Q.: تعلم التشابه القائم على العلامات المتعددة لإعادة تحديد هوية المركبات. IEEE Access7 (2019)
[4] بيراج، ك.، كومار، أ.، بيري، ن.، وآخرون: نموذج المسار المزدوج مع الاهتمام التكيفي لإعادة تحديد هوية المركبة. في: مؤتمر IEEE الدولي للرؤية الحاسوبية (2019)
[5] يان باي، ويهانغ لو، ويونغ شينغ داي، وآخرون: شبكة تعلم الميزات المنفصلة لإعادة تحديد هوية المركبات. في: IJCAI 2020
[6] كوما راتنيش ووايل إدوين وآخرون: إعادة تحديد هوية المركبات: خط أساس فعال باستخدام التضمين الثلاثي. في IJCNN 2019
[7] شين جين، كويلينج لان، وينجون تسينج، تشيبو تشين: التقطير المعرفي متعدد اللقطات غير المؤكد لإعادة تحديد هوية الكائنات استنادًا إلى الصور. في: AAAI 2020
[8] لو هاو وغو يوزي وآخرون: حقيبة الحيل وخط أساس قوي لإعادة تحديد هوية الأشخاص بشكل عميق. في ورشة عمل CVPR 2019.
[9] شين فاي، تشو جيان تشينغ وآخرون: استكشاف الأهمية المكانية عبر شبكة الرسم البياني الهرمي الهجين لإعادة تحديد هوية المركبات. في arXiv ما قبل الطباعة arXiv:2005.14684
[10] أبهيجيت سوبريم وكالتون بو: المظهر الساحر: إعادة تعريف المركبات في شبكات الكاميرات غير المتجانسة مع الاهتمام العالمي والمحلي. في arXiv الطباعة المسبقة arXiv:2002.02256
[11] خورامشاهي بيراج، بيري نيهار، تشن جون تشينج، تشيلابا راما: الشيطان يكمن في التفاصيل: الاهتمام الخاضع للإشراف الذاتي لإعادة تحديد هوية المركبات. في إي سي سي في 2020
[12] منغ، ديشاو، وآخرون. "شبكة التضمين المستندة إلى التحليل لإعادة تحديد هوية المركبة." وقائع مؤتمر IEEE/CVF حول رؤية الكمبيوتر والتعرف على الأنماط. 2020.
[13] يان باي، يهانغ لو، فنغ جاو، شيكي وانغ، يووي وو، ولينغيو دوان. مجموعة التضمين الثلاثي الحساس لإعادة تحديد هوية السيارة. معاملات IEEE على الوسائط المتعددة، 2018.
[14] يان باي، وجون ليو، ويهانغ لو، وسي وانغ، ولينغيو دوان. شبكة تعلم الميزات المنفصلة ومعيار شامل لإعادة تعريف المركبات. تبامي 2021.


