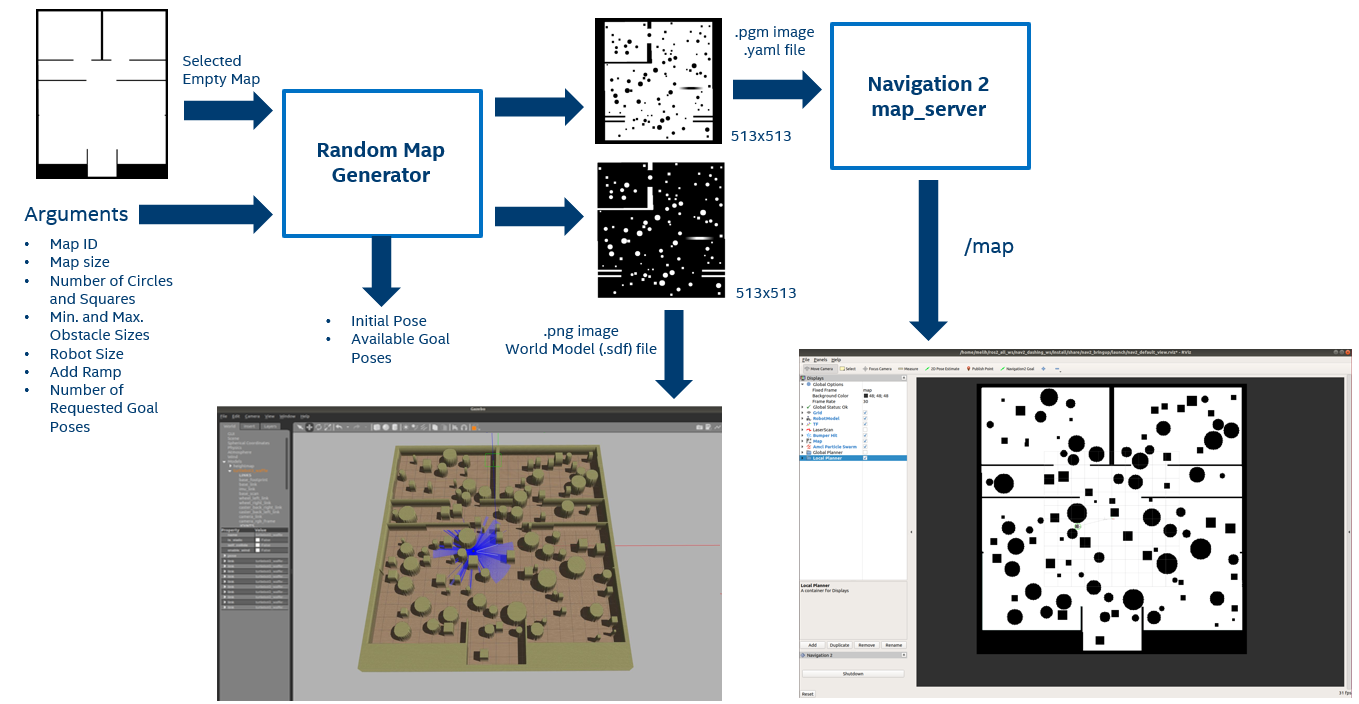
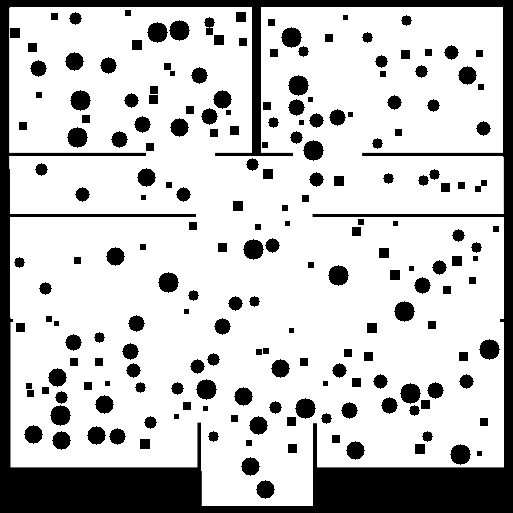
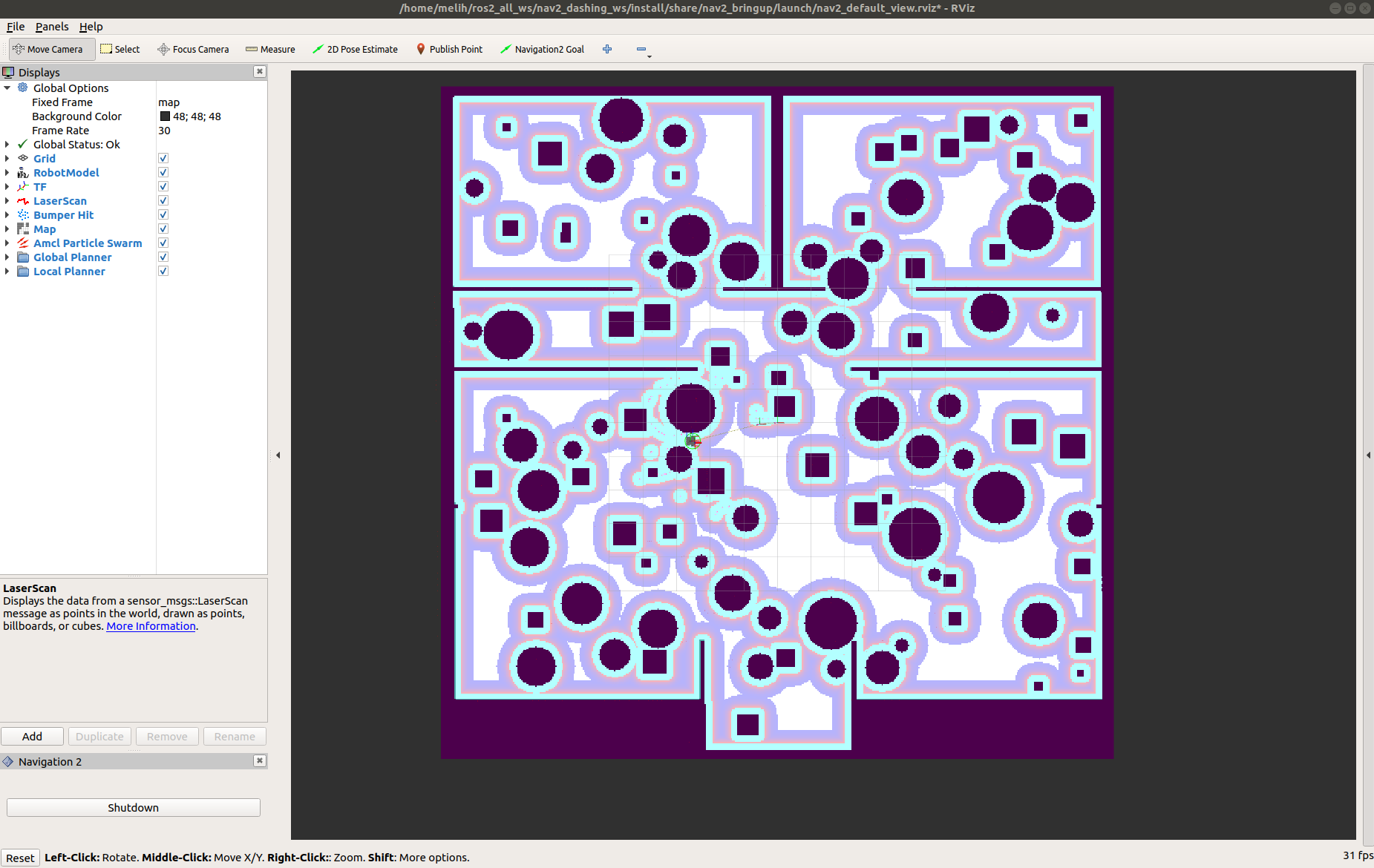
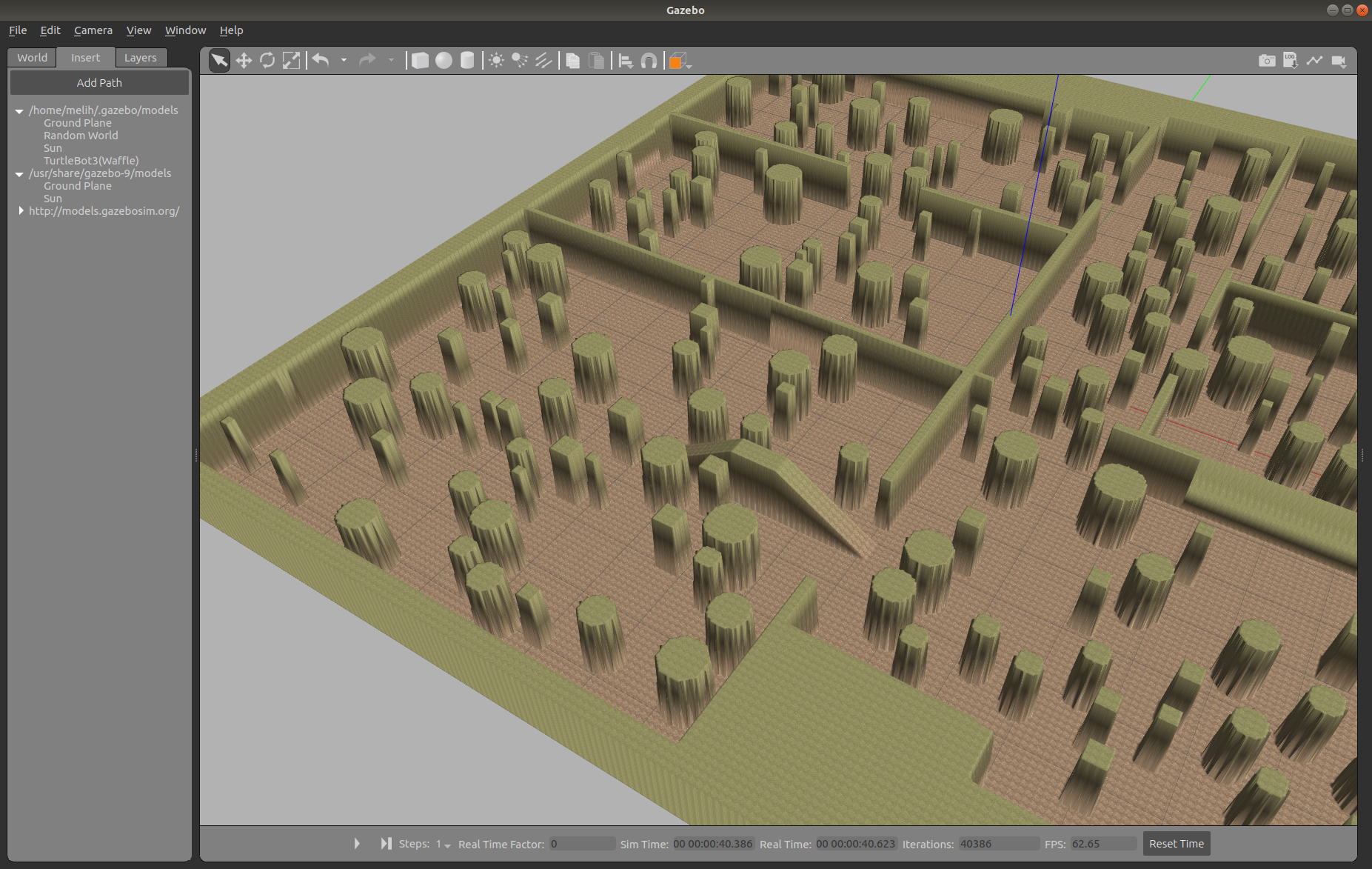
تقوم هذه الأداة بإنشاء خرائط تم إنشاؤها عشوائيًا ونماذج عالمية يمكن استخدامها بواسطة Navigation 2 وGazebo. ويستخدم جزءًا صغيرًا من مجموعة بيانات HouseExpo. إنها مجموعة من صور التخطيط الداخلي الفارغة ثنائية الأبعاد المرسومة يدويًا. الخرائط الفارغة موجودة في دليل الخرائط. يقوم منشئ الخرائط العشوائية بوضع العوائق بشكل عشوائي في الخرائط ذات التدرج الرمادي. يجب أن تكون الخرائط بتنسيق png. حاليًا، يتم دعم إضافة دوائر ومربعات ومنحدرات. يمكن للمستخدم تكوين الحجم والشكل والنوع والمسافة بين العوائق. يتم استخدام خريطة ارتفاع Gazebo لإنشاء نموذج عالمي لـ Gazebo لخريطة تم إنشاؤها عشوائيًا. يمكن نسخ دليل Random_world في دليل .gazebo/model لاستخدامه مع Gazebo. يجب أن يكون حجم الخريطة التي تم إنشاؤها 2^n+1 x 2^n+1. وإلا فإنه لن يعمل مع جازيبو. تم تغيير حجم النموذج العالمي في جازيبو إلى 20 مترًا × 20 مترًا.
sudo apt-get update
sudo apt-get upgrade
قم بتثبيت OpenCV
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libopencv-dev
cd nav2_random_map_generator
make
أو
cd src
g++ circle.cpp main.cpp map.cpp obstacle.cpp ramp.cpp rmg.cpp square.cpp -o random-map `pkg-config --cflags --libs opencv`
./map_generator <Map Id> <Number_of_Circles> <Number_of_Squares> <Robot_Size (px*0.03898)> <Map_Size(x)> <Map_Size(y)> <Min_Circle_Radius> <Max_Circle_Radius> <Min Square_Size> <Max_Circle_Radius> <Add Ramp> <Show_Map>
مثال:
./map_generator 10 200 200 5 513 513 5 10 5 10 1 1
./map_generator h
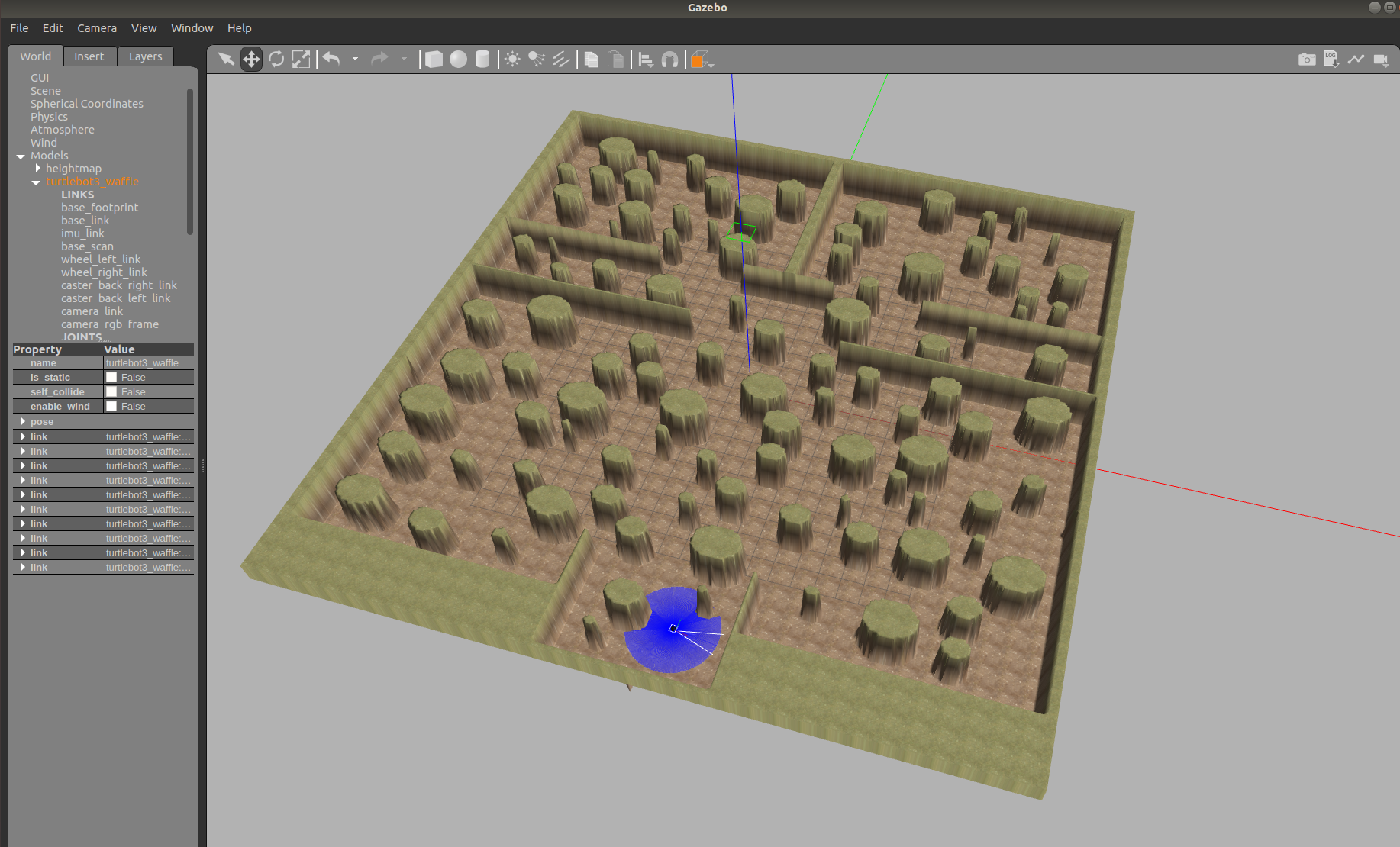
فيديو اختبار خريطة رامدوم TB3
فيديو اختبار منحدر خريطة رامدوم


