carma platform
carma-system-4.5.0
| بناء صورة DockerHub | سير عمل اختبارات الوحدة | جودة كود السونار |
|---|---|---|
 |  |

تعمل شركة CARMA SM على تطوير البحث والتطوير لتسريع جاهزية السوق ونشر أتمتة القيادة التعاونية، مع تطوير تكنولوجيا القيادة الآلية للسلامة والأمن والبيانات والذكاء الاصطناعي. وهو يشجع التعاون والمشاركة من قبل مجتمع المهندسين والباحثين لتعزيز فهم أتمتة القيادة التعاونية باستخدام البرمجيات مفتوحة المصدر (OSS) وممارسات إدارة المشاريع الرشيقة.
CARMA عبارة عن منصة قابلة لإعادة الاستخدام وقابلة للتوسيع للتحكم في المركبات الآلية المتصلة (AVs) من المستوى 2 وفقًا لمعايير SAE. فهو يوفر واجهة برمجة تطبيقات غنية وعامة للمكونات الإضافية التابعة لجهات خارجية والتي تنفذ خوارزميات توجيه المركبات لتخطيط مسارات المركبات. إنه مكتوب بلغة C++ ويعمل في بيئة نظام تشغيل Robot (ROS) على Ubuntu. يمكن إعادة استخدام المنصة على مجموعة متنوعة من المركبات المجهزة بشكل صحيح. بدأت عملية الترحيل من إطار عمل ROS 1 إلى ROS 2.
تم تحديث هذا الملف التمهيدي: 23 أكتوبر 2020
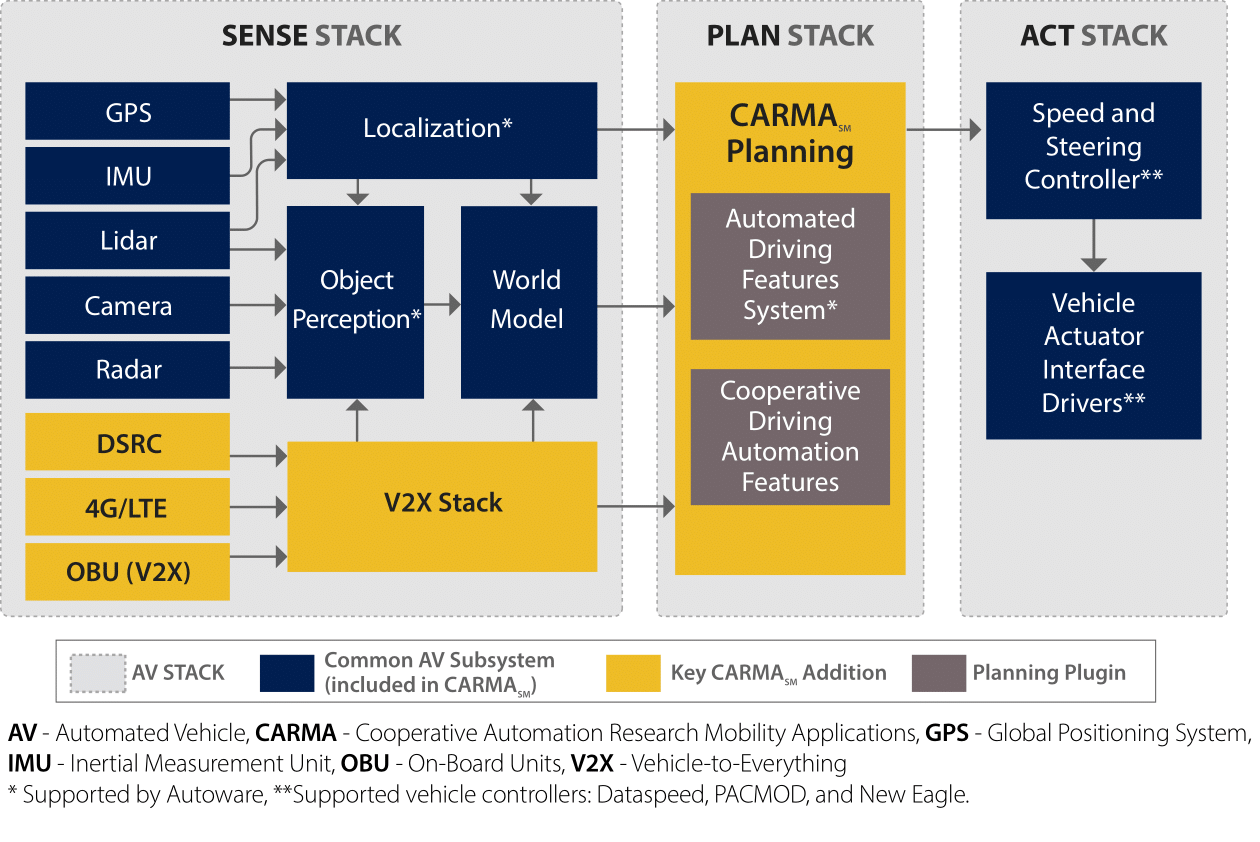
تتضمن إدارة حركة السيارة الآلية ثلاثة جوانب. الأول هو الملاحة، والمعروف أيضًا باسم تحديد الموقع ، وهو عملية تحديد مكان تواجد السيارة حاليًا بالنسبة إلى الأرض وفيما يتعلق بمسار السفر المطلوب (مسارها المخطط). والثاني هو التوجيه، المعروف أيضًا باسم تخطيط المسار ، والذي يتضمن عمليات تحديد كيفية تحرك السيارة من موقعها الحالي إلى وجهتها. سيتم تسليم الوجهة والمسار إلى خوارزميات التوجيه، ثم تحدد بعد ذلك كيفية تعديل حركة السيارة في أي وقت من أجل متابعة المسار. الجانب الثالث من حركة السيارة الآلية هو التحكم ، والذي يغطي تشغيل الأجهزة المادية للمركبة لإحداث تغييرات في الحركة (بالنسبة للمركبات البرية، عادةً ما تتسبب هذه الأجهزة في دوران العجلات بشكل أسرع أو أبطأ وإدارة عجلة القيادة). ولذلك، يصبح حل الملاحة مدخلاً لوظيفة التوجيه، ويصبح حل التوجيه مدخلاً لوظيفة التحكم. مع تحرك السيارة، من الواضح أن موقعها يتغير بحيث تحتاج وظيفة الملاحة باستمرار إلى تحديث حلها وتتكرر الدورة بالسرعة اللازمة لإنتاج حركة سلسة ودقيقة للمركبة. يتم تحديد معدل التكرار إلى حد كبير من خلال السرعة المتوقعة للمركبة.
توفر منصة CARMA وظائف الملاحة والتوجيه للمركبة المضيفة، بالإضافة إلى بعض وظائف التحكم. يعتمد ذلك على أجهزة التحكم ذات المستوى المنخفض لتوفير بقية وظيفة التحكم. يوفر الإصدار الحالي من منصة CARMA استقلالية من المستوى 3+ وفقًا لمعايير SAE، مع التحكم في السرعة والتوجيه.

يمكن العثور على وثائق إعداد وتشغيل وتصميم منصة CARMA على صفحات التقاء المشروع. يمكن العثور على وثائق إضافية على صفحة وثائق كود مصدر Doxygen.
الإصدار الحالي وتاريخ الإصدار لمنصة برامج CARMA: ملاحظات إصدار CARMA
ملاحظة هيكل الريبو: يعكس الآن الفروع الرئيسية والمطورة لهذا الريبو (وجميع عمليات الريبو الأخرى في مؤسسة usdot-fhwa-stol GitHub) الجيل الثالث من كود ووثائق CARMA، المسمى CARMA3. يستخدم Autoware لتوفير إمكانية التشغيل الآلي من المستوى 2 و3 من SAE. لا يزال رمز CARMA2 القديم مدعومًا. تم استخدامه على نطاق واسع من قبل الإدارة الفيدرالية للطرق السريعة (FHWA) خلال عام 2018 لتجارب المستوى الأول من SAE. للعمل مع قاعدة التعليمات البرمجية هذه، يرجى مراجعة فرع تكامل CARMA2 وتقديم طلبات السحب إليه (باستخدام عملية المساهمة الموضحة أدناه).
ملاحظة إصدار ROS: كان الإصدار 3.11 هو الإصدار الأخير من منصة CARMA الذي يحتوي على كود ROS1 فقط. ستحتوي فروع التطوير والإصدارات المستقبلية على مزيج من كود ROS1 وROS2 في نظام مختلط حتى يتم نقل جميع التعليمات البرمجية بالكامل إلى ROS2. يمكنك معرفة المزيد حول هذا النظام وجهود ترحيل ROS2 عند التقاء هنا: CARMA Platform ROS2 Docs
يمكن العثور على التوجه الحالي لتطوير النظام البيئي لـ CARMA وخطط الإصدار هنا: خريطة طريق CARMA
يعمل نظام منصة CARMA الحالي كمزيج من مكونات ROS 1 Noetic وROS 2 Foxy. في حين تمت ترقية جميع المكونات تقريبًا إلى ROS 2 Foxy، إلا أن كمية صغيرة من محتوى ROS 1 Noetic لا تزال موجودة داخل النظام، بما في ذلك بعض الحزم في هذا المستودع. لمزيد من المعلومات، يرجى الاطلاع على الوثائق ذات الصلة في مستودع carma-config.
تصف الوثائق بنية البرنامج داخل مركبة CARMA واحدة. قد يكون هناك العديد من هذه المركبات التي تعمل بشكل متضافر، وتتواصل مع بعضها البعض عبر DSRC أو الوسائل الخلوية. يمكنهم أيضًا التواصل مع البنية التحتية على جانب الطريق باستخدام DSRC أو الهاتف الخلوي. ومع ذلك، فإن الاتصال بين مكونات البرنامج داخل مركبة واحدة يتم في الغالب عبر إطار عمل نظام تشغيل الروبوت (ROS). لا توجد اتصالات ROS بين المركبات المجاورة. بنية نظام CARMA3
للحصول على معلومات حول بنية نظام CARMA2، يرجى مراجعة بنية نظام CARMA2
يرجى الاطلاع على صفحة مستند التصميم التفصيلي للحصول على مواصفات التصميم التفصيلية لـ CARMA والمعلومات الإضافية الأخرى. صفحة تصميم التفاصيل
يمكن العثور على وثائق وتعليمات التطوير المفيدة لإعداد بيئة التطوير لمنصة CARMA على الصفحات التالية:
سيتم إصدار دليل مطوري المكونات الإضافية لـ CARMA3 قريبًا.
للحصول على وصف لطريقة تطوير مكون إضافي لـ CARMA2، يرجى الاطلاع على دليل مطوري CARMA 2.7
سيتم إصدار دليل مستخدم لـ CARMA3 قريبًا.
للحصول على وصف للوظيفة الخاصة بـ CARMA2 في كاديلاك SRX، راجع دليل مستخدم CARMA
سيتم إصدار دليل المسؤول لـ CARMA3 قريبًا.
للحصول على معلومات إدارية عن CARMA2، بما في ذلك تكوين السيارة وجهاز الكمبيوتر الخاص بالمطور، وخطوات البناء والنشر والاختبار اللازمة لتثبيت منصة CARMA وتشغيلها، يرجى الاطلاع على دليل المسؤول
CARMA Platform SM عبارة عن منصة برمجية مفتوحة المصدر (OSS) قابلة للتنزيل وتم تصميمها لتكون قابلة للتوسيع وإعادة الاستخدام لمجموعة واسعة من الأغراض البحثية لتعزيز الابتكار في أتمتة القيادة التعاونية. فهو يتيح التواصل بين المركبات ومستخدمي الطريق مثل المشاة وراكبي الدراجات الهوائية والدراجات البخارية وأجهزة البنية التحتية القادرة على الاتصال. إنه يعزز التعاون بين مجتمع المهندسين والباحثين لتسريع تطوير واختبار وتقييم أتمتة القيادة التعاونية مع تعزيز السلامة والأمن والبيانات واستخدام الذكاء الاصطناعي في تكنولوجيا القيادة الآلية.
يتم توزيع منصة CARMA كمجموعة من الحزم المستقلة المتعددة المستضافة في مستودعات Github المنفصلة. تسهل هذه الحزم تشغيل منصة CARMA بتكوينات مختلفة للأجهزة أو تسمح لها بدعم أوضاع تشغيل مختلفة. لتضمين إحدى هذه الحزم في الإصدار الخاص بك من نظام CARMA Platform، يرجى استنساخ مستودع Github في نفس مساحة عمل Catkin src/ المجلد مثل هذا المستودع. سيتحقق نظام بناء Catkin من حل التبعيات بشكل مناسب وسيبني الحزمة المضمنة حديثًا عند تشغيل catkin_make في المرة التالية. تتضمن القائمة غير الكاملة للحزم المتاحة لـ CARMA3 ما يلي:
يمكن العثور على قائمة كاملة بالحزم المتاحة في مؤسسة USDOT FHWA STOL Github.
CARMA Cloud SM عبارة عن خدمة برمجيات مفتوحة المصدر (OSS) قائمة على السحابة وقابلة للتنزيل، وتوفر معلومات لدعم وتمكين أتمتة القيادة التعاونية. فهو يتيح التواصل مع الخدمات السحابية والمركبات ومستخدمي الطريق مثل المشاة وراكبي الدراجات والدراجات البخارية وأجهزة البنية التحتية القادرة على الاتصال. إنه يعزز التعاون بين مجتمع المهندسين والباحثين لتسريع تطوير واختبار وتقييم أتمتة القيادة التعاونية مع تعزيز السلامة والأمن والبيانات واستخدام الذكاء الاصطناعي في تكنولوجيا القيادة الآلية. يمكن العثور على الكود المصدري لـ CARMA Cloud هنا على GitHub.
مرحبًا بك في دليل المساهمة الخاص بـ CARMA. يرجى قراءة هذا الدليل للتعرف على عملية التطوير لدينا، وكيفية اقتراح طلبات السحب والتحسينات، وكيفية إنشاء واختبار تغييراتك على هذا المشروع. دليل المساهمة في CARMA
يرجى قراءة قواعد سلوك CARMA الخاصة بنا والتي تحدد توقعاتنا للمشاركين داخل مجتمع CARMA، بالإضافة إلى خطوات الإبلاغ عن السلوك غير المقبول. نحن ملتزمون بتوفير مجتمع ترحيبي وملهم للجميع ونتوقع احترام قواعد السلوك الخاصة بنا. أي شخص ينتهك قواعد السلوك هذه قد يتم حظره من المجتمع.
يود فريق التطوير أن يشكر الأشخاص الذين قدموا مساهمات مباشرة في التصميم والتعليمات البرمجية في هذا المستودع. إسناد كارما
من خلال المساهمة في تطبيقات التنقل البحثية الآلية المتصلة (CARMA) التابعة للإدارة الفيدرالية للطرق السريعة (FHWA)، فإنك توافق على أن مساهماتك سيتم ترخيصها بموجب ترخيص Apache License 2.0. رخصة كارما
الوكالة: دوت
وصف مختصر: تطبيقات التنقل لأبحاث الأتمتة التعاونية (CARMA) عبارة عن منصة برمجية مفتوحة المصدر (OSS) تعمل على جهاز كمبيوتر داخل السيارة، ويتفاعل الكمبيوتر مع أجهزة السيارة لتمكين البحث الآلي التعاوني للمركبات وتطويرها واختبارها. يقوم الكمبيوتر بعد ذلك بإعطاء السيارة المعلومات اللازمة للتفاعل والتعاون مع البنية التحتية والمركبات الأخرى. بدأت المرحلة الأولى من هذا المشروع الجيل التالي من أسطول CARMA من خلال تطوير بنية تحتية مشتركة للمنصة من شأنها أن تدعم الرؤية الإستراتيجية لـ FHWA للتعاون الآلي أنظمة القيادة (CADS). قامت المرحلة الأولى أيضًا بتطوير النموذج الأولي المتكامل للطرق السريعة (IHP) من خلال دمج التطبيقات الحالية ونوع مركبة جديد، الشاحنة الثقيلة، في أسطول CARMA. التطبيقات الخمسة التالية هي مجالات بحث رئيسية: (1) فصيلة المركبات، (2) نهج التقاطع المُشار إليه والمغادرة، (3) تنسيق السرعة الموجهة للبنية التحتية، و (4) تغيير المسار التعاوني، و (5) دمج المنحدر التعاوني. المرحلة الثانية سيعمل هذا المشروع على تطوير CADS، التي تم تطويرها على منصة أبحاث CARMA التابعة لـ FHWA للسماح باختبار استراتيجيات التحكيم والتفاوض. وفي نهاية المطاف، سيعمل هذا المشروع على تعزيز كفاءة البنية التحتية وتقليل الازدحام المروري. أحد أهداف هذا المشروع هو تسريع نقل التكنولوجيا ونشر تطبيقات المركبات التعاونية من خلال التعاون مفتوح المصدر مع الصناعة وأصحاب المصلحة. سيمكن هذا المشروع جمعية المهندسين (SAE) من المستوى 2 والمستوى 3 (L2/3) من قدرات اختبار المركبات الخفيفة وتطوير أسطول من أربع مركبات ثقيلة من SAE L2/3. سيقوم المشروع أيضًا بتطوير مفهوم رفيع المستوى لإدارة وعمليات نظام النقل (TSMO) حول استخدام تكنولوجيا القيادة الآلية. علاوة على ذلك، سيحدد هذا المشروع سيناريوهات إدارة حوادث المرور (TIM) التي توفر تحسينات إستراتيجية واستراتيجيات جديدة لحالات استخدام المستجيب الأول الذي يتفاعل مع ADS ويستخدم ADS. سيتم استخدام أسطول FHWA الجديد لوضع نموذج أولي لسيناريو لكل فئة من فئات حالات الاستخدام التالية: (1) السفر الأساسي، (2) منطقة العمل، (3) إدارة حوادث المرور، و(4) الطقس. ستوفر هذه الاختبارات بيانات موضوعية لإعلام أصحاب المصلحة بتأثيرات ADS والاستراتيجيات الممكنة لاستخدام ADS لتحسين العمليات.
الحالة: بيتا
العلامات: النقل، أتمتة القيادة التعاونية، المركبات المتصلة، أنظمة النقل الذكية، C++، جافا، بيثون، عامل الإرساء
ساعات العمل: 200
اسم جهة الاتصال: جيمس ليو
هاتف الاتصال: (202) 366-3000
الرجاء النقر على شعار CARMA أدناه لزيارة موقع CARMA الخاص بإدارة الطرق السريعة الفيدرالية (FHWA). لمزيد من المعلومات، اتصل بـ [email protected].

للحصول على الدعم الفني من فريق CARMA، يرجى الاتصال بمكتب مساعدة CARMA على [email protected].