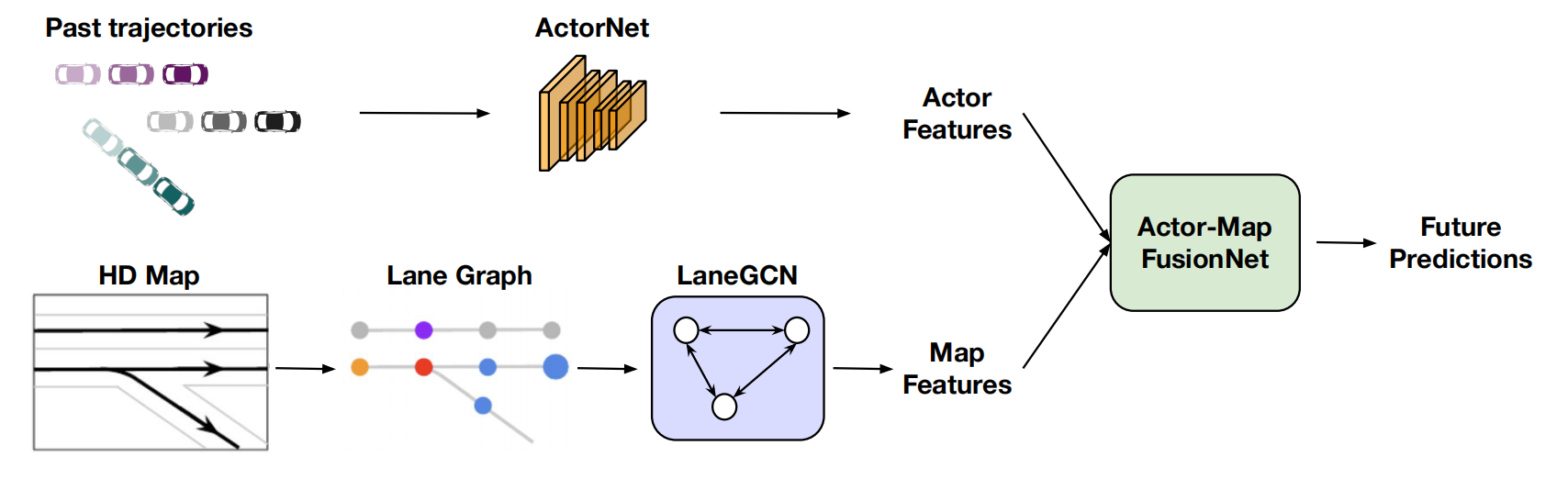
LaneGCN
1.0.0
حذر
تم اختراق حاوية Amazon AWS S3 argoai-argoverse التي تحتوي على العديد من الملفات التجريبية. قد تكون الملفات تالفة.
تم تعديل الملفات التي تشير إلى مجموعة S3 هذه، ويتم التعليق على أي عمليات استرجاع من هذه المجموعة. يرجى المضي قدما بحذر.
ورق | الشرائح | صفحة المشروع | ECCV 2020 فيديو شفهي
مينغ ليانغ، بن يانغ، روي هو، يون تشن، رينجي لياو، سونغ فنغ، راكيل أورتاسون
حصل على المركز الأول في مسابقة Argoverse للتنبؤ بالحركة
تحتاج إلى تثبيت الحزم التالية لتشغيل الكود:
conda create --name lanegcn python=3.7
conda activate lanegcn
conda install pytorch==1.5.1 torchvision cudatoolkit=10.2 -c pytorch # pytorch=1.5.1 when the code is release
# install argoverse api
pip install git+https://github.com/argoai/argoverse-api.git
# install others dependancy
pip install scikit-image IPython tqdm ipdbmpi4py للتدريب الموزع. يعد Horovod أكثر كفاءة من nn.DataParallel للتدريب على وحدات معالجة الرسوميات المتعددة وأسهل في الاستخدام من nn.DistributedDataParallel . قبل تثبيت horovod، تأكد من تثبيت openmpi ( sudo apt-get install -y openmpi-bin ). pip install mpi4py
# install horovod with GPU support, this may take a while
HOROVOD_GPU_OPERATIONS=NCCL pip install horovod==0.19.4
# if you have only SINGLE GPU, install for code-compatibility
pip install horovodإذا كان لديك أي مشاكل بخصوص horovod، يرجى الرجوع إلى horovod github
يمكنك التحقق من البرامج النصية وتنزيل البيانات المعالجة بدلاً من تشغيلها لساعات.
bash get_data.sh # single node with 4 gpus
horovodrun -np 4 -H localhost:4 python /path/to/train.py -m lanegcn
# 2 nodes, each with 4 gpus
horovodrun -np 8 -H serverA:4,serverB:4 python /path/to/train.py -m lanegcnيستغرق تدريب النموذج على 4 وحدات معالجة رسوميات (RTX 5000) باستخدام الهوروفود 8 ساعات.
نحن أيضًا نوفر لك سجل تدريب لتصحيح الأخطاء.
python train.py -m lanegcnيمكنك تنزيل النموذج المُدرب مسبقًا من هنا
python test.py -m lanegcn --weight=/absolute/path/to/36.000.ckpt --split=test
python test.py -m lanegcn --weight=36.000.ckpt --split=val
نتائج نوعية
التسميات (الأحمر) التنبؤ (الأخضر) الوكلاء الآخرون (الأزرق)
النتائج الكمية 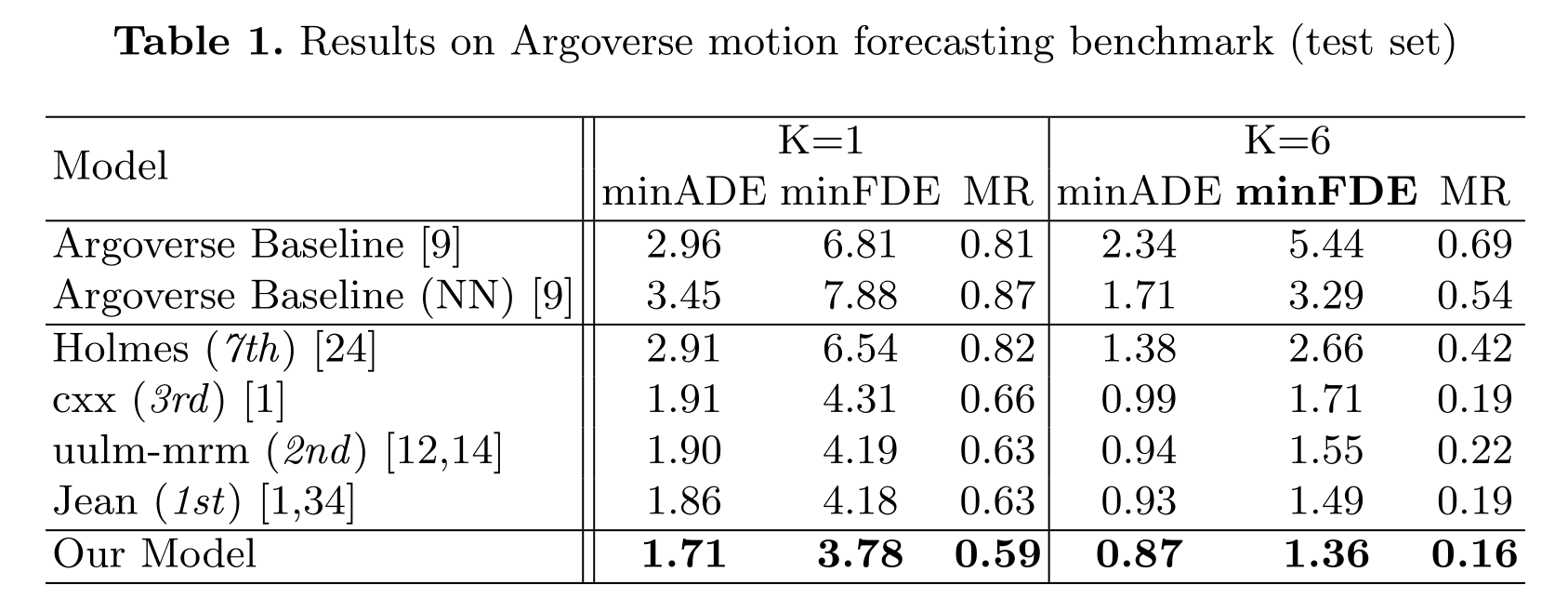
التحقق من الترخيص
إذا كنت تستخدم كود المصدر الخاص بنا، فيرجى مراعاة الاستشهاد بما يلي:
@InProceedings { liang2020learning ,
title = { Learning lane graph representations for motion forecasting } ,
author = { Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel } ,
booktitle = { ECCV } ,
year = { 2020 }
}إذا كان لديك أي أسئلة بخصوص الكود، يرجى فتح مشكلة و@chenyuntc.


