Car Simulator
1.0.0
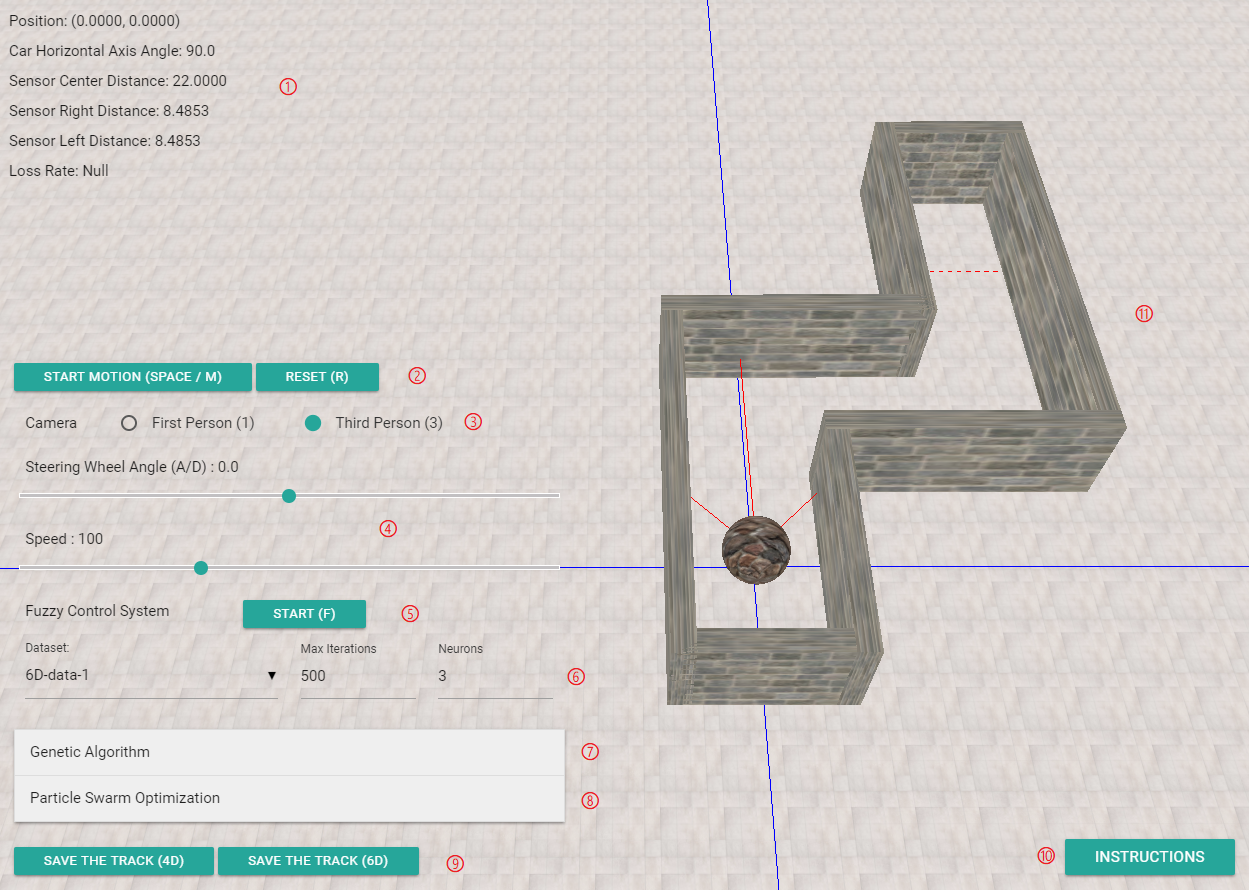
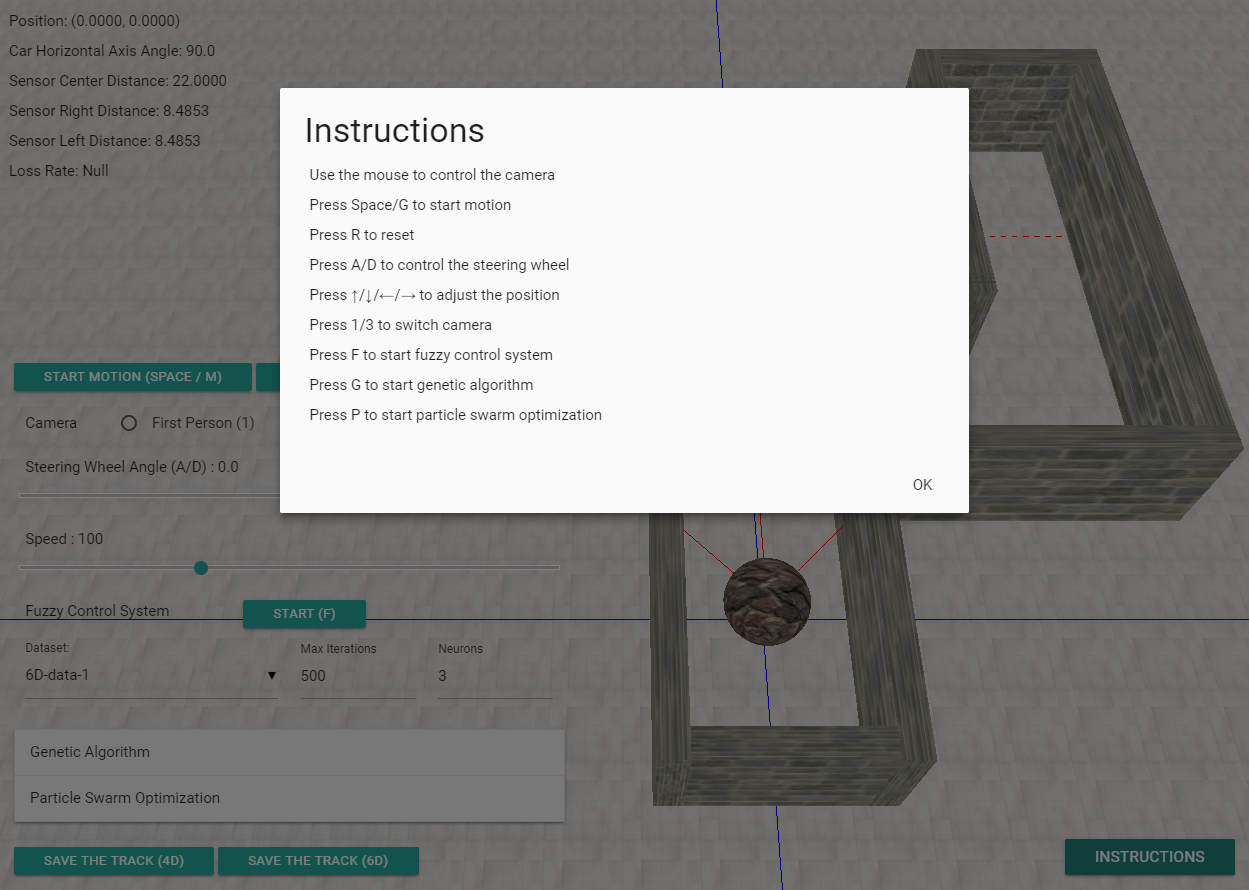
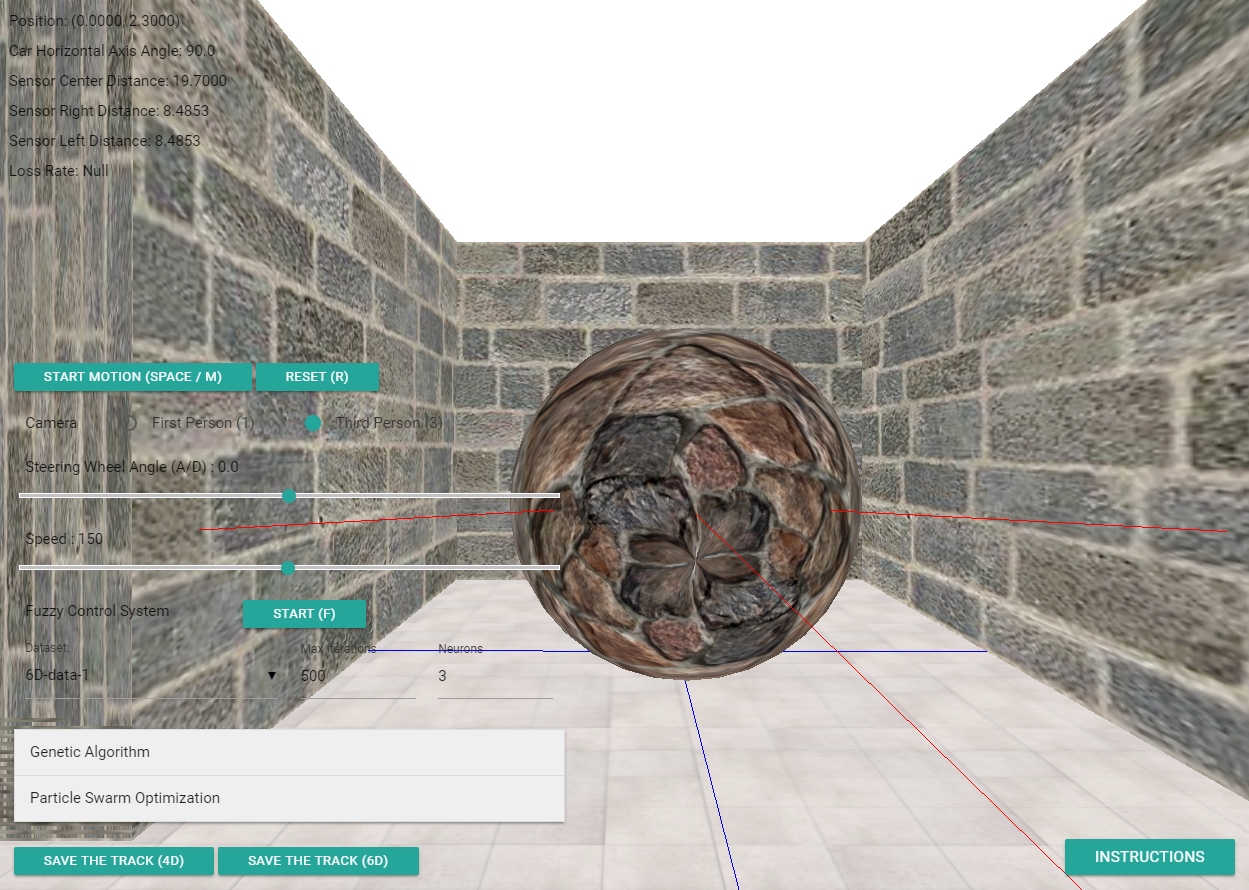
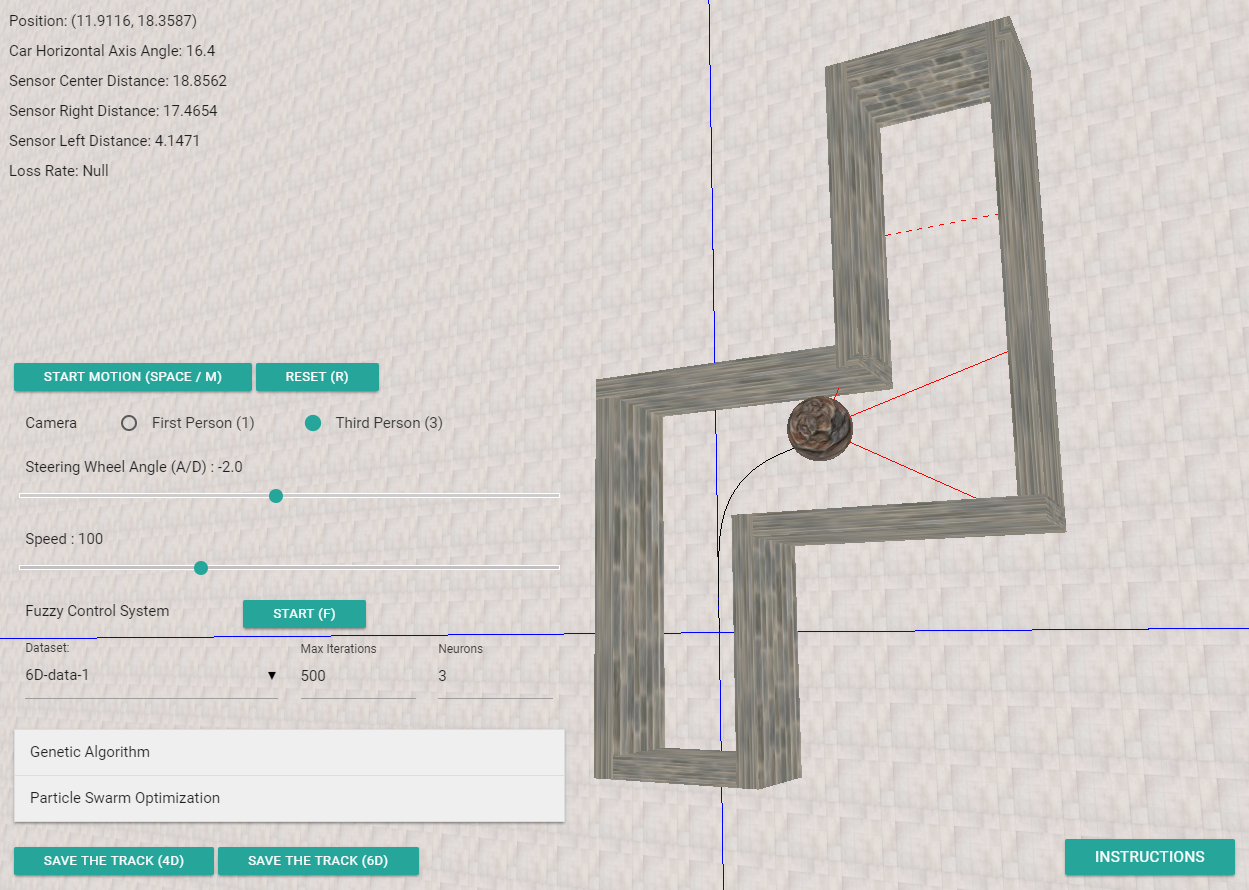
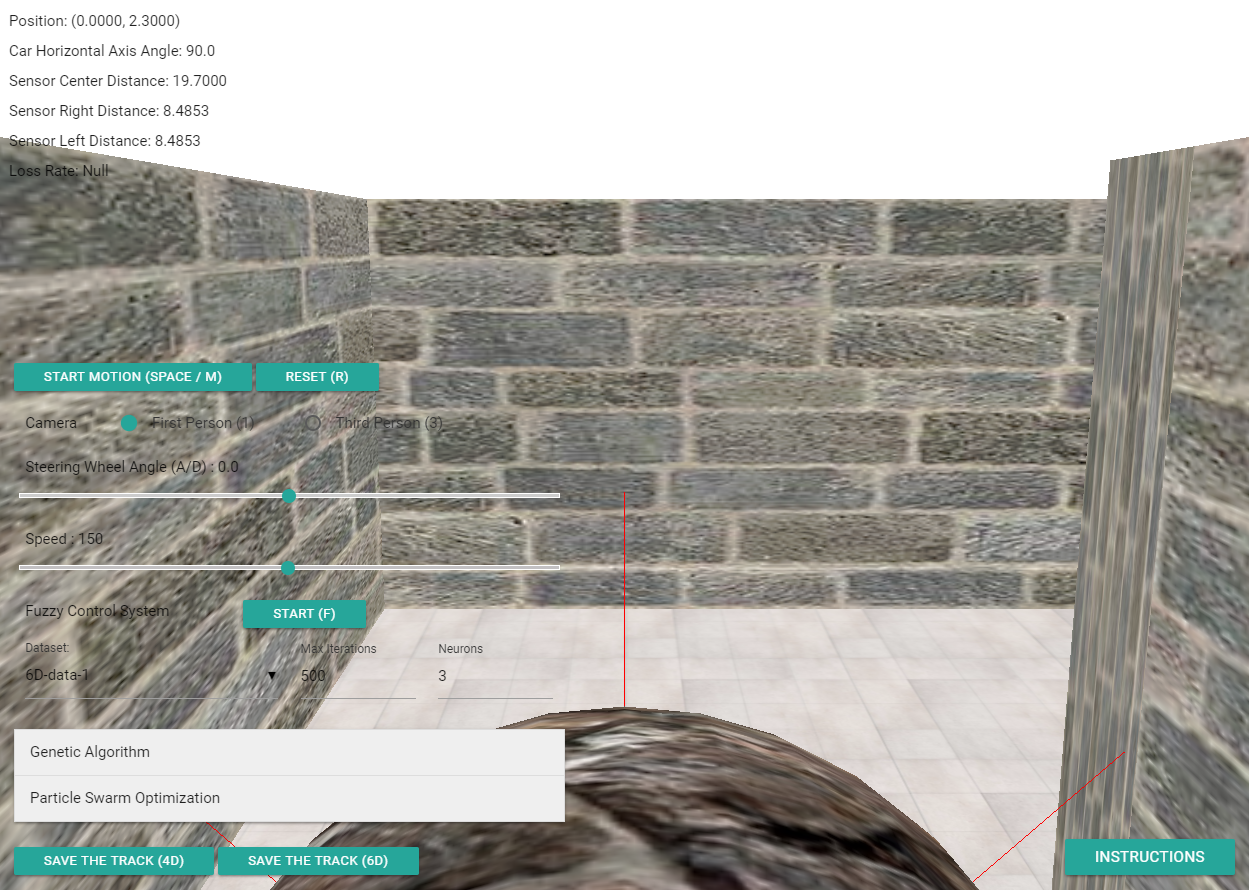
تستخدم Car Simulator نظام التحكم الغامض والخوارزمية الجينية وتحسين سرب الجسيمات لمحاكاة حركة السيارة المستقلة على الخريطة. كما أنه يدعم جهاز الواقع الافتراضي، انظر هنا للحصول على التفاصيل.
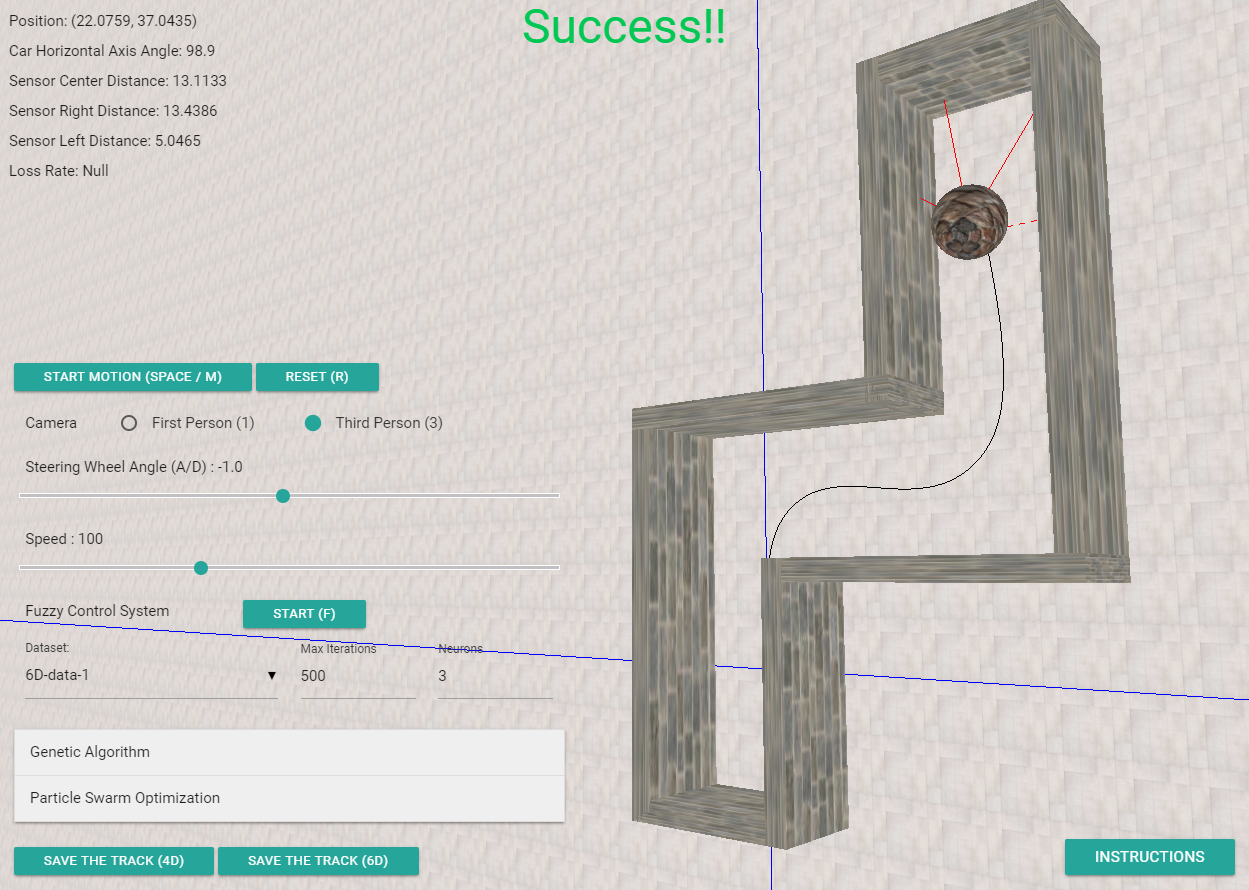
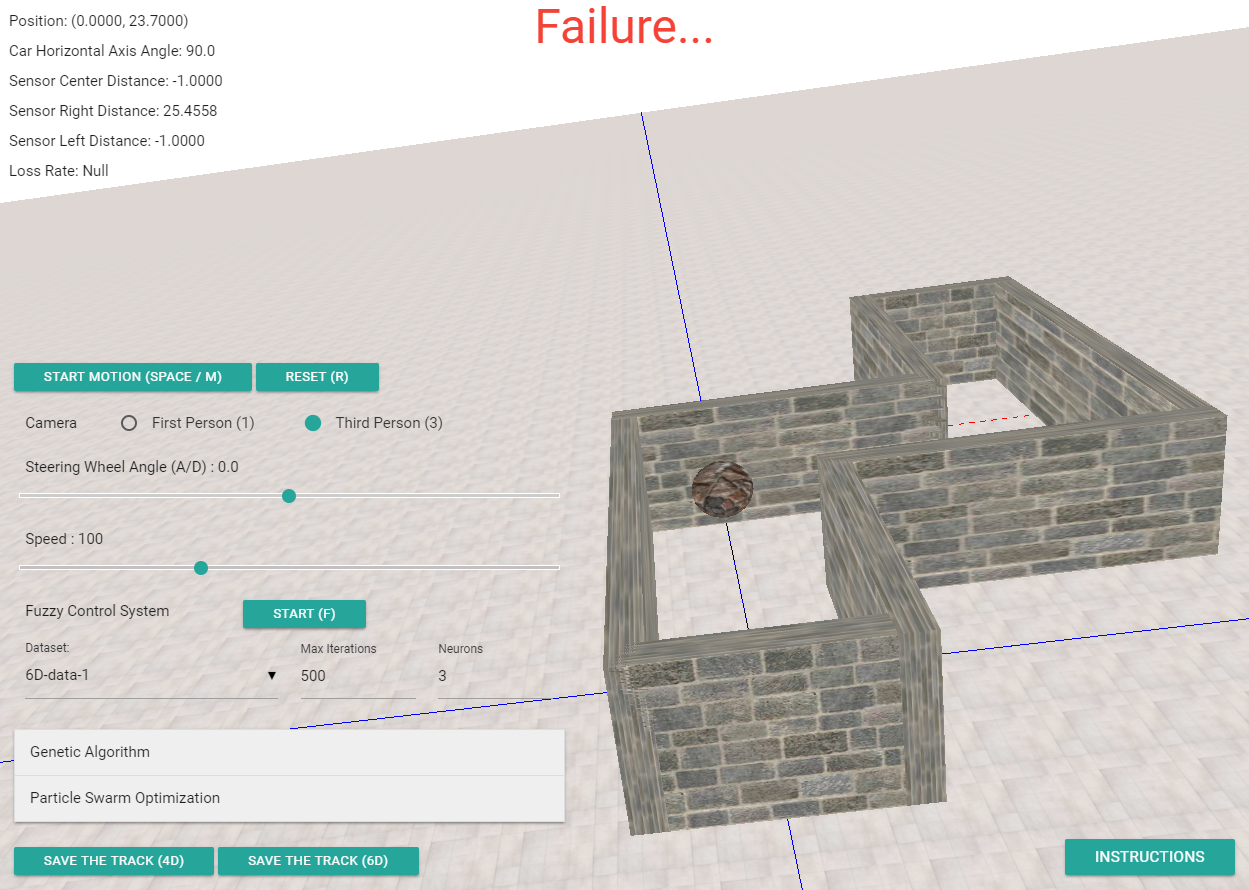
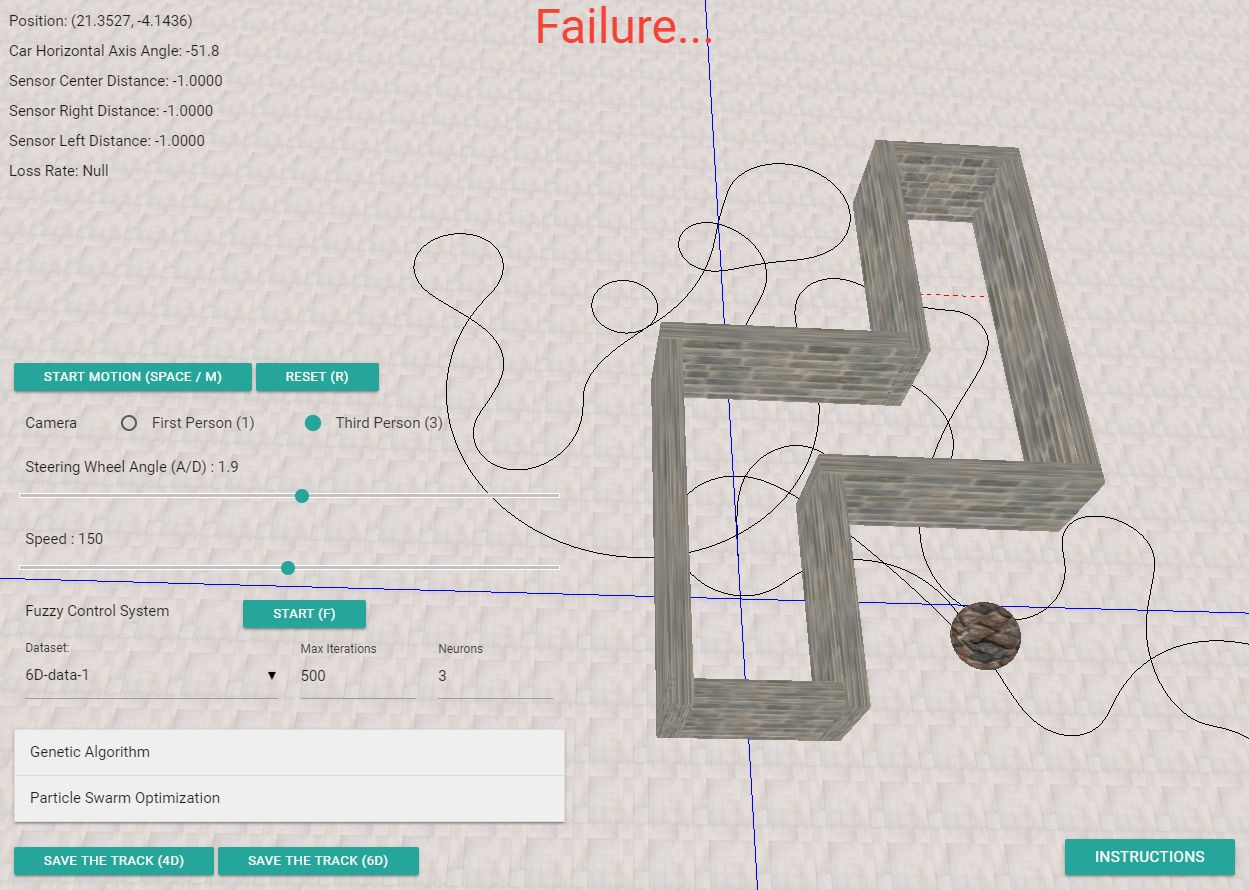
يحتوي الإدخال على مستشعرات المسافة الثلاثة للسيارة (الأمامية، 45 درجة يسارًا ويمينًا)، والتي يمكن الحصول عليها من معادلة الحركة المحددة، موضع السيارة والزاوية بين السيارة والمحور الأفقي. الإخراج هو زاوية دوران عجلة القيادة.
الهدف هو الوصول إلى خط النهاية دون الاصطدام بالجدار وإخراج مسار الحركة (بما في ذلك موضع كل نقطة زمنية وقيمة المستشعر وزاوية دوران عجلة القيادة) كملف نصي، ثم عرضه على الواجهة الرسومية.
معادلة الحركة للسيارة المحاكاة هي كما يلي:
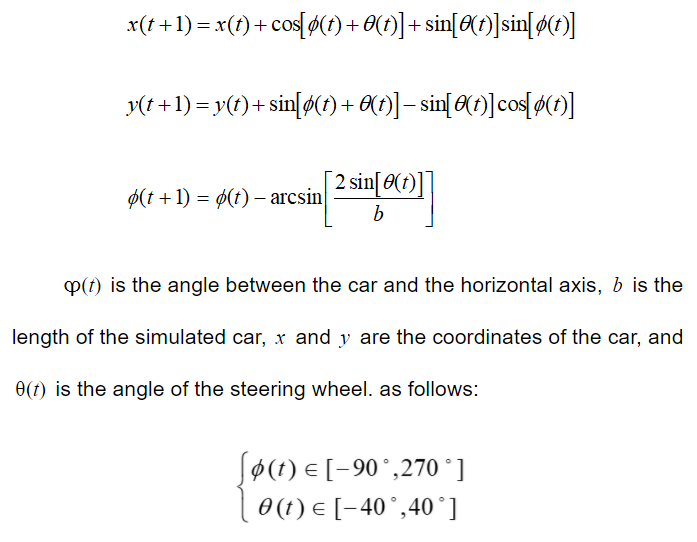
يستخدم نظام التحكم الضبابي القواعد الغامضة السبعة المخصصة ومركز مزيل الجاذبية المنفصل. انظر هنا للحصول على التفاصيل.
يستخدم Car Simulator الخوارزمية الجينية ذات القيمة الحقيقية (GA) لتدريب شبكة الوظائف الأساسية الشعاعية (RBFN) وسيتم التحكم في السيارة بواسطة RBFN. يتم تعريف الجين على أنه المعلمات الثلاثة لـ RBFN (w، m، σ) لمتجه البعد المختلط. دالة اللياقة البدنية هي متوسط التباين للمخرجات المتوقعة لمجموعة البيانات ومخرجات RBFN في حالة الإدخال المحددة. أدنى قيمة للياقة البدنية هي أفضل معلمة RBFN.
هيكل شبكة الوظائف الأساسية الشعاعية هو كما يلي:
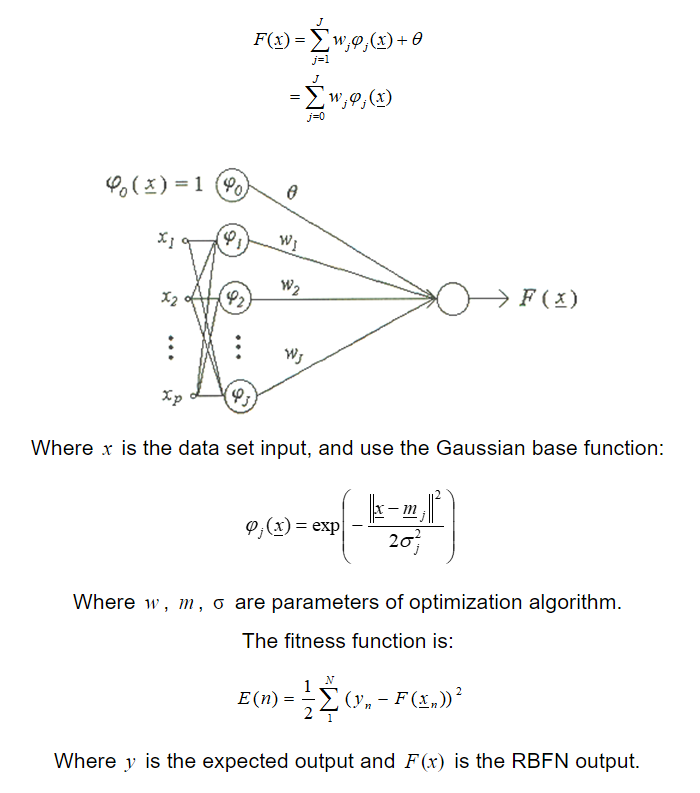
يمكن لـ Car Simulator أيضًا استخدام تحسين سرب الجسيمات (PSO) لتدريب RBFN. يتم تعريف إحداثيات PSO على أنها المعلمات الثلاثة لـ RBFN (w، m، σ) لمتجه البعد المختلط. دالة اللياقة البدنية هي متوسط التباين للمخرجات المتوقعة لمجموعة البيانات ومخرجات RBFN في حالة الإدخال المحددة. أدنى قيمة للياقة البدنية هي أفضل معلمة RBFN.
https://jasonnor.github.io/Car-Simulator/
يدعم Car Simulator أيضًا جهاز الواقع الافتراضي، يرجى فتح هذه الصفحة.
InputA1 InputB1 InputC1 Output1
InputA2 InputB2 InputC2 Output2
...
حيث تمثل InputA قيمة مستشعر المسافة المركزية، وInputB هي قيمة مستشعر المسافة اليمنى، وInputC هي قيمة مستشعر المسافة اليسرى والإخراج هو زاوية دوران عجلة القيادة. يمكن العثور على مجموعات البيانات الافتراضية هنا.
InputA1 InputB1 InputC1 InputD1 InputE1 Output1
InputA2 InputB2 InputC2 InputD1 InputE1 Output2
...
حيث InputA هو إحداثي X للسيارة، InputB هو إحداثي Y للسيارة، InputC هي قيمة مستشعر المسافة المركزية، InputD هي قيمة مستشعر المسافة اليمنى، InputE هي قيمة مستشعر المسافة اليسرى والإخراج هو زاوية دوران عجلة القيادة. يمكن العثور على مجموعات البيانات الافتراضية هنا.
لا تتردد في استخدامه إذا كنت مهتمًا بإصلاح المشكلات والمساهمة مباشرة في قاعدة التعليمات البرمجية.
تم إصدار Car Simulator بموجب ترخيص MIT. راجع ملف الترخيص للحصول على التفاصيل.


