SquawkersMcGraw
1.0.0
هندسة عكسية وإعادة تعزيز صديق هاسبرو فوريال "Squawkers McGraw" Parrot Animatronic 
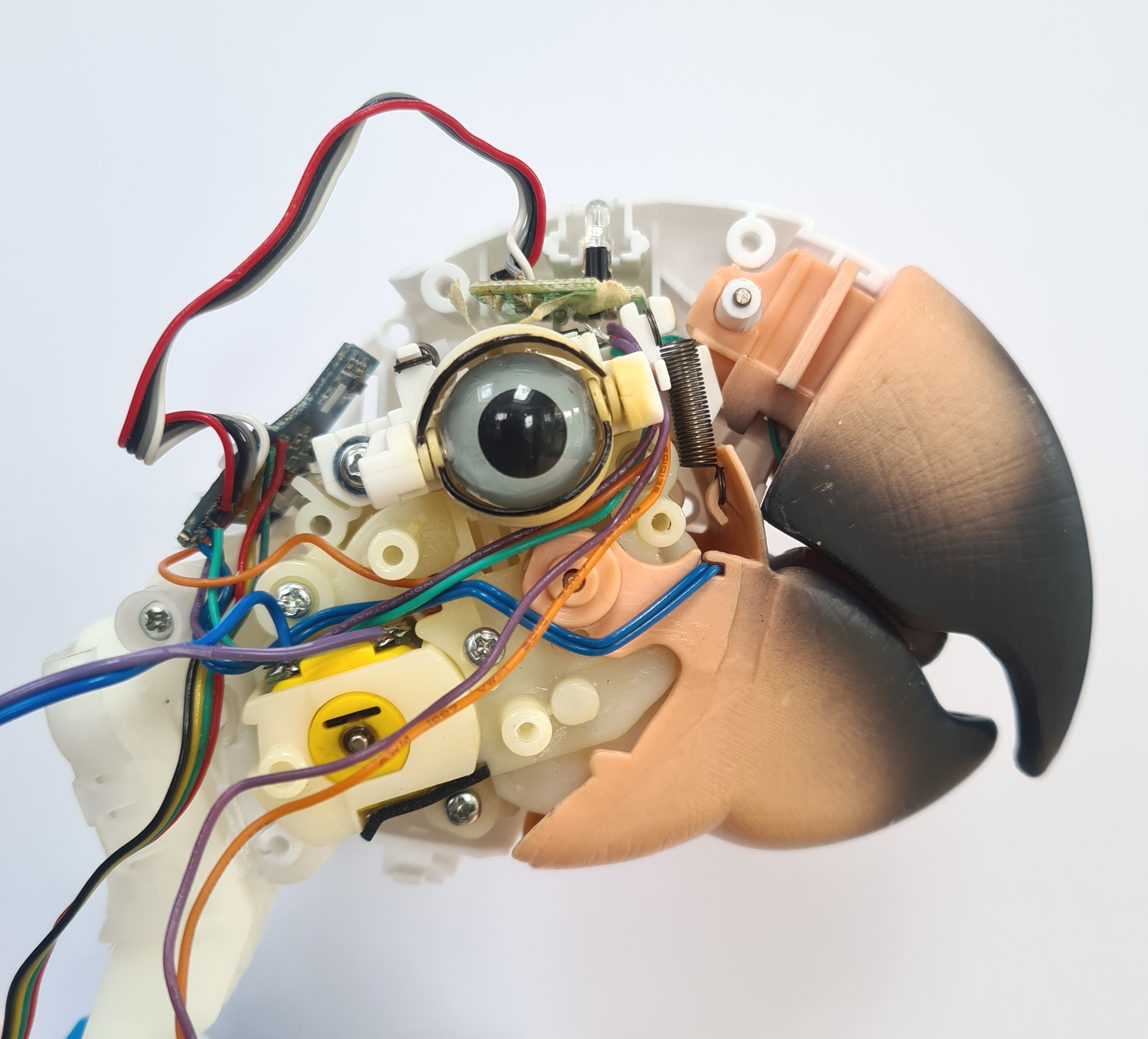 |  |  |
هناك مجموعة متنوعة من المفاتيح ومدخلات المستشعرات ، على النحو التالي:
يتم التحكم في جميع الحركات من خلال محركات هواية DC فقط. باستخدام نظام CAM ذكي ، يمكن أن يؤدي عكس اتجاه المحركات إلى مشغلات مختلفة.

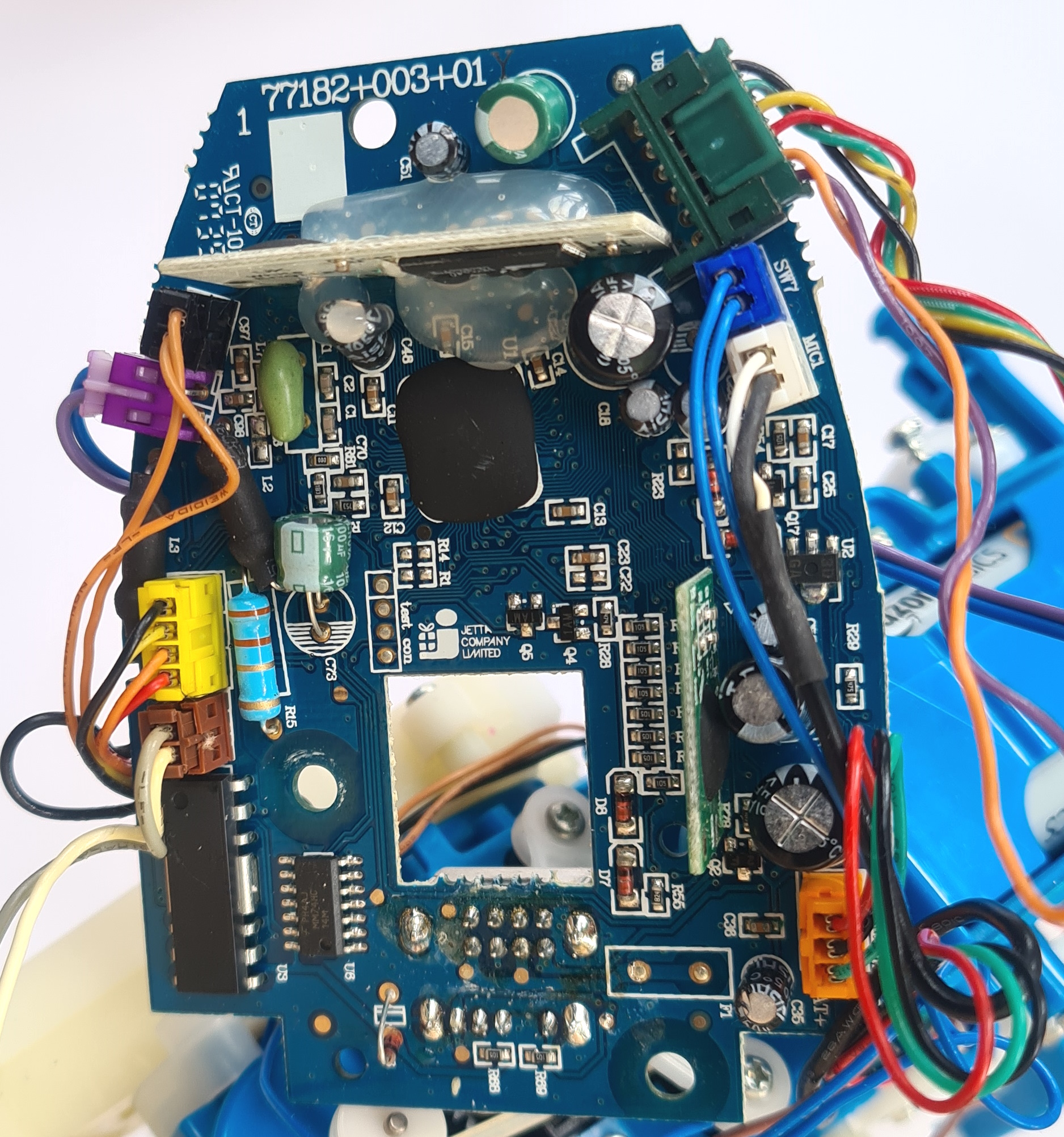
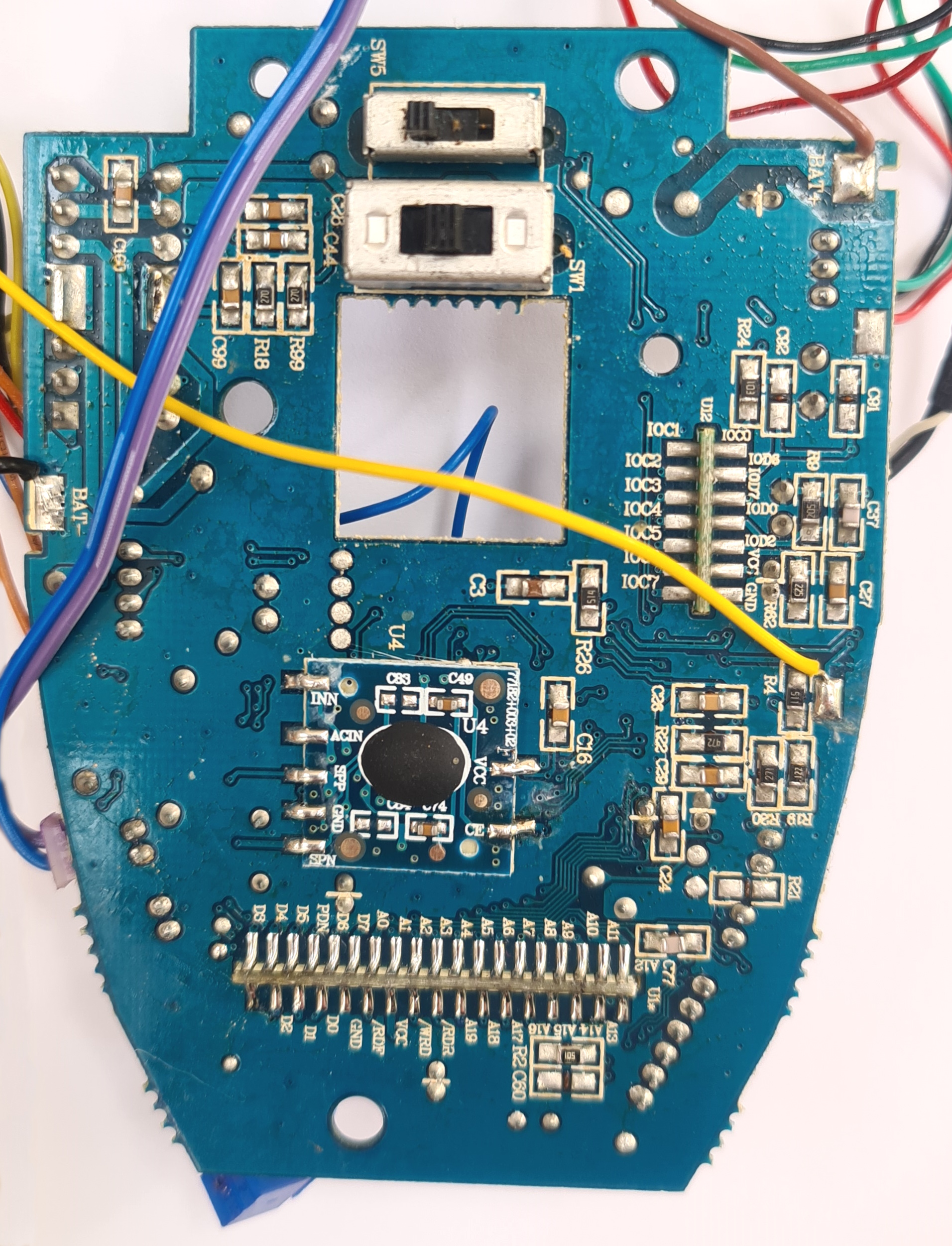
تحتوي وحدة التحكم على مفتاح موضع ثلاثة ، وثلاثة أزرار وضع تشغيل ، و 6 أزرار برنامج ، وزر تسجيل مخصص. يبدو أن بُث سلاسل الأوامر باستخدام تردد الناقل 38 كيلو هرتز المشترك. للحصول على طريقة غير مدمرة للتحكم في Squawkers McGraw ، يمكنك ببساطة نقل رموز الأوامر نفسها هذه لتشغيل أي من السلوكيات المدمجة.
تم الاستيلاء على سلاسل الأوامر التالية باستخدام Arduino ورمز محلل الإشارة بالأشعة تحت الحمراء الموصوفة في https://www.patreon.com/posts/infrared-puzzle-28343366
// Repeat Button
unsigned int repeatData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,1000,2000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1100,2000,2000,1000,1000,2000,2000,1000,1100,2000,2000,1000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000,2000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000,1000};
// Custom Record [same as Response]
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
// Repeat Button (same for Command and Gags)
unsigned int repeatData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000};
// Dance (same in every mode)
unsigned int danceData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,1000};
// Reset (same in every mode)
unsigned int resetData[17] = {3000,3000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,2000,1000,1000,2000,1000};
// Buttons
unsigned int aData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,2000,1000,1000};
unsigned int bData[17] = {3000,3000,1000,2000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,1000,2000,1000};
unsigned int cData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,2000,1000,1000};
unsigned int dData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,1000,2000,2000,1000,2000,1000,1000,2000,1000};
unsigned int eData[17] = {3000,3000,1000,2000,1000,2000,2000,1000,2000,1000,1000,2000,2000,1000,2000,1000,1000};
unsigned int fData[17] = {3000,3000,1000,2000,2000,1000,1100,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
// Custom Record
unsigned int customRecordData[17] = {3000,3000,1000,2000,2000,1000,1000,2000,1000,2000,1000,2000,1000,2000,1000,2000,1000};
يتطلب تخصيص سلوك الببغاء تمامًا تعديلًا أكثر تدميراً - كسر الاتصالات إلى لوحة التحكم وبدلاً من ذلك توصيل المدخلات والمخرجات إلى معالج مثل Arduino ، على النحو التالي:
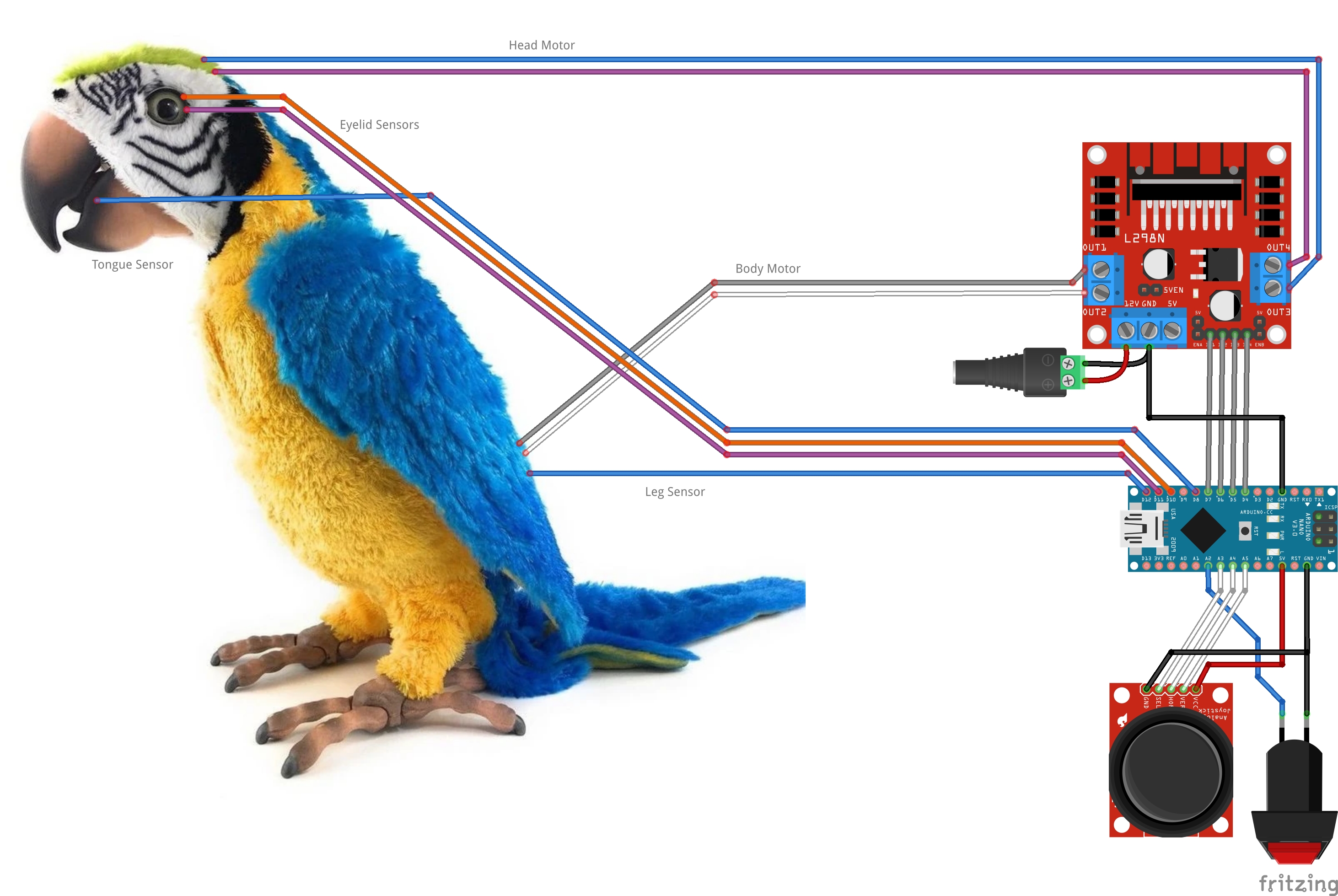
لاحظ أن كل من المستشعرات الموضحة تتكون فعليًا من زوج من الأسلاك - إشارة إدخال واحدة ، وسلك أرضي واحد (مع وجود وحدة تحكم على متنها inport_pullups عندما لا يتم تشغيل المدخلات). يظهر الرمز المستخدم للتحكم في وحدة التحكم المعدلة في رسم مخطط Arduino .In في هذا المستودع.


